



联合使用根轨迹分析MATLAB函数的几个指令,会使解题更简单、方便。
【例8-1】 设一负反馈系统的开环传递函数为 ,1)当开环零点z=-1.12时,试绘制系统的根轨迹,并简单分析系统的稳定性;2)当z=-1时,试概略确定闭环系统具有最佳阻尼比的极点、对应的开环增益K的大致范围及其超调量。
,1)当开环零点z=-1.12时,试绘制系统的根轨迹,并简单分析系统的稳定性;2)当z=-1时,试概略确定闭环系统具有最佳阻尼比的极点、对应的开环增益K的大致范围及其超调量。
解:1)绘制z=-1.12时系统的根轨迹。
clear;n=[11.12];d=conv([100],[0.11]);
sys=tf(n,d);rlocus(sys),grid;
程序运行后,绘制系统的根轨迹如图8-1所示。由图可见,①根轨迹即系统闭环特征根的变化全在复平面虚轴的左边,说明系统闭环总是稳定的;②在实轴上的根轨迹区段,起始
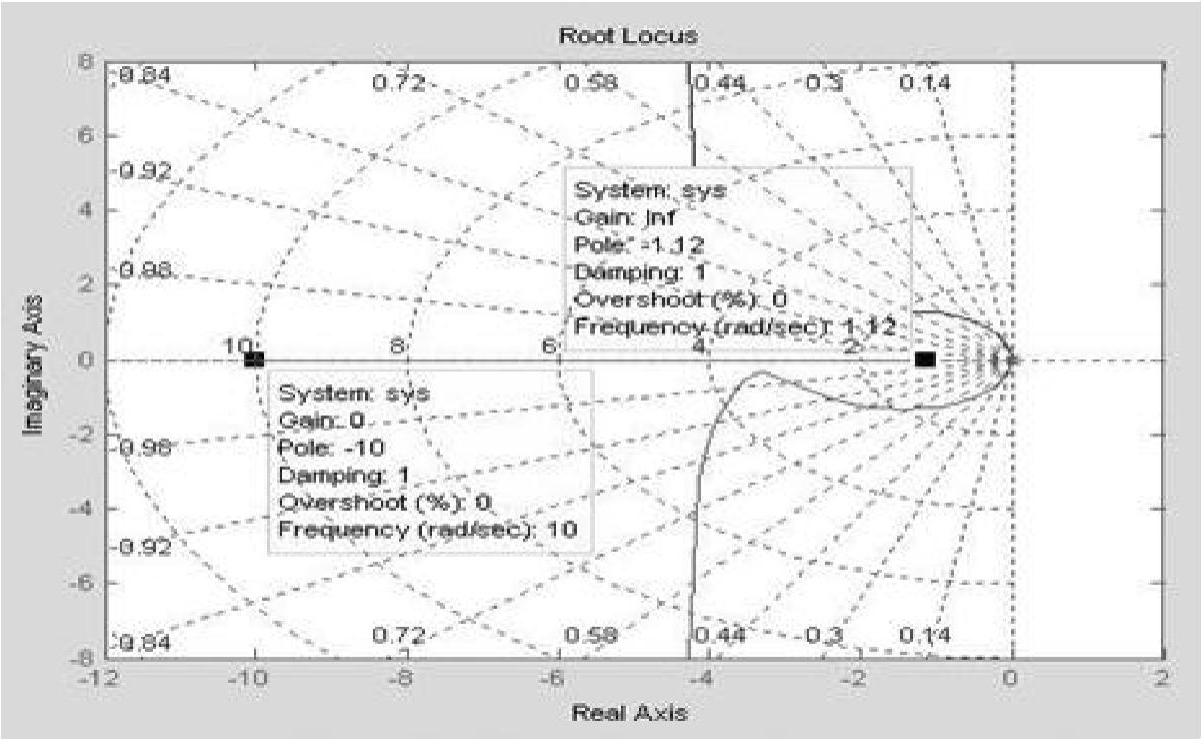
图8-1 开环零点z=-1.12时系统根轨迹
于开环极点p=-10,对应开环增益K=0,终止于开环零点z=-1.12,对应开环增益K=∞(inf)。系统的超调量均为0。图中的文字框信息有该点的“Gain”(K值)、“Pole”(零、极点坐标)、对应系统的“Dmping”(阻尼系数)、“Overshoot”(超调量)、“Frequency”(无阻尼自然振荡角频率)等。2)绘制z=-1时系统根轨迹。根据自动控制原理,当ζ=0.707时,σ%=4.33%。
绘制z=-1时系统根轨迹的程序如下。
clear;n=[11];d=conv([100],[0.11]);
sys=tf(n,d);rlocus(sys),grid;
程序运行后得到根轨迹图如图8-2所示。在复平面中,单击与负实轴成45°夹角线附近的一点,显示数据为阻尼比ζ=0.705、增益K=4.91、极点poles=-4.32+4.39i,超调量σ%=4.4%。
当执行以下程序绘制系统根轨迹时,选择点selected_point=-4.32+4.39i,系统计算出的数据与图8-2中的数据相差不大。
clear;n=[11];d=conv([100],[0.11]);sys=tf(n,d);
rlocus(sys),grid;[k,poles]=rlocfind(sys,-4.32+4.39i),
程序运行后得到
k=4.9477
poles=-4.3525+4.3885i
-4.3525-4.3885i
-1.2951
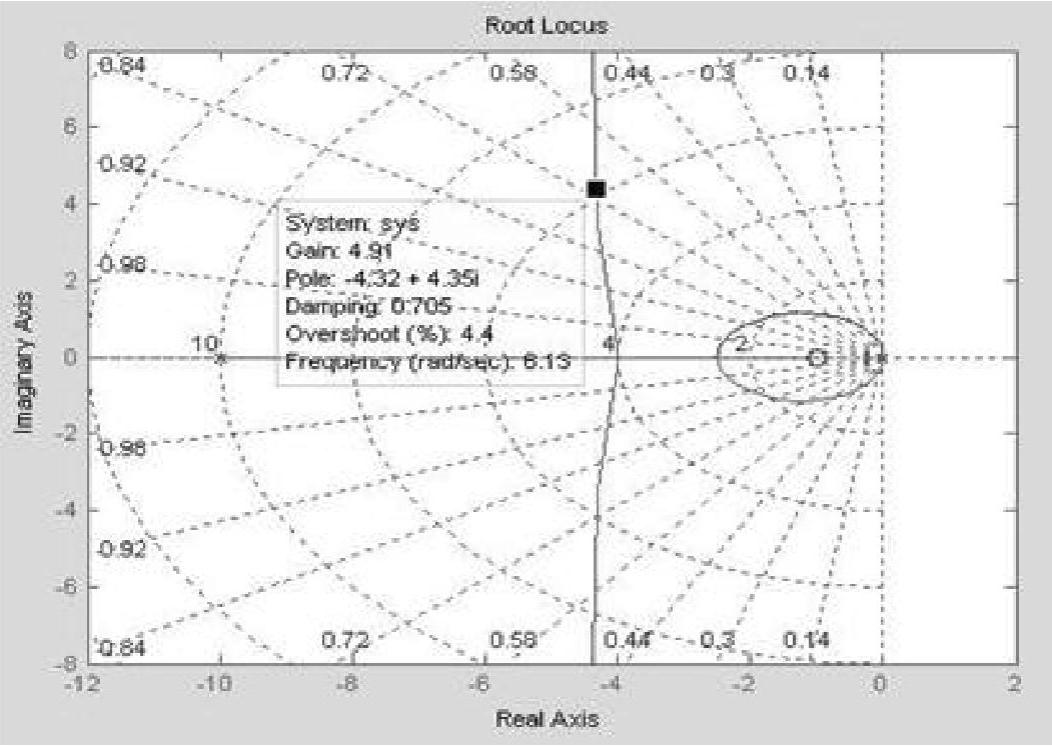
图8-2 开环零点z=-1时系统的根轨迹
2)结论。当z=-1时,系统根轨迹与负实轴成45°夹角线附近的点都具有近似最佳阻尼比ζ(0.705~0.709)与对应开环增益K(4.8~5.0)及其相应超调量σ%(4.2%~4.7%)。
【例8-2】 设系统结构如图8-3所示。1)试绘制该系统的根轨迹;2)试绘制根轨迹在复平面左边、右边与纵坐标轴三种情况时对应系统的阶跃响应曲线并比较分析。
解:1)绘制系统的根轨迹。
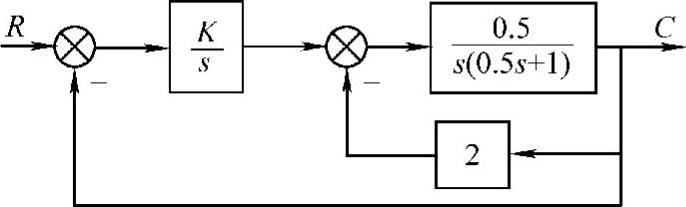
图8-3 系统结构图
①求系统开环传递函数。
clear;syms s G2 H2 G1 G K phi1;G2=0.5/(s∗(0.5∗s+1));
H2=2;phi1=G2/(1+G2∗H2);G1=K/s;G=factor(G1∗phi1),
程序运行后得到 。
。
②用G(s)绘制根轨迹。
clear;n=1;d=conv([10],[122]);
sys=tf(n,d);rlocus(sys),grid;
程序执行后,可得系统的根轨迹图如图8-4所示。当选择根轨迹与纵坐标轴的交点时,MATLAB系统提示文本框显示开环增益K=4。此时对应系统为临界稳定。
2)绘制三种情况时对应系统阶跃响应曲线。
以开环增益K=4对应系统临界稳定为参考,选K=2相当于在复平面左边的根轨迹上取一点,再选K=6相当于复平面右边的根轨迹上取一点,分别绘制系统阶跃响应曲线。
clear;d=conv([10],[122]);i=0;
for k=2:2:6
i=i+1;n=k;G=tf(n,d);sys=feedback(G,1);figure(i);step(sys),grid;pause;
if k==6
disp( 按任一键退出!
按任一键退出! )
)
end
end
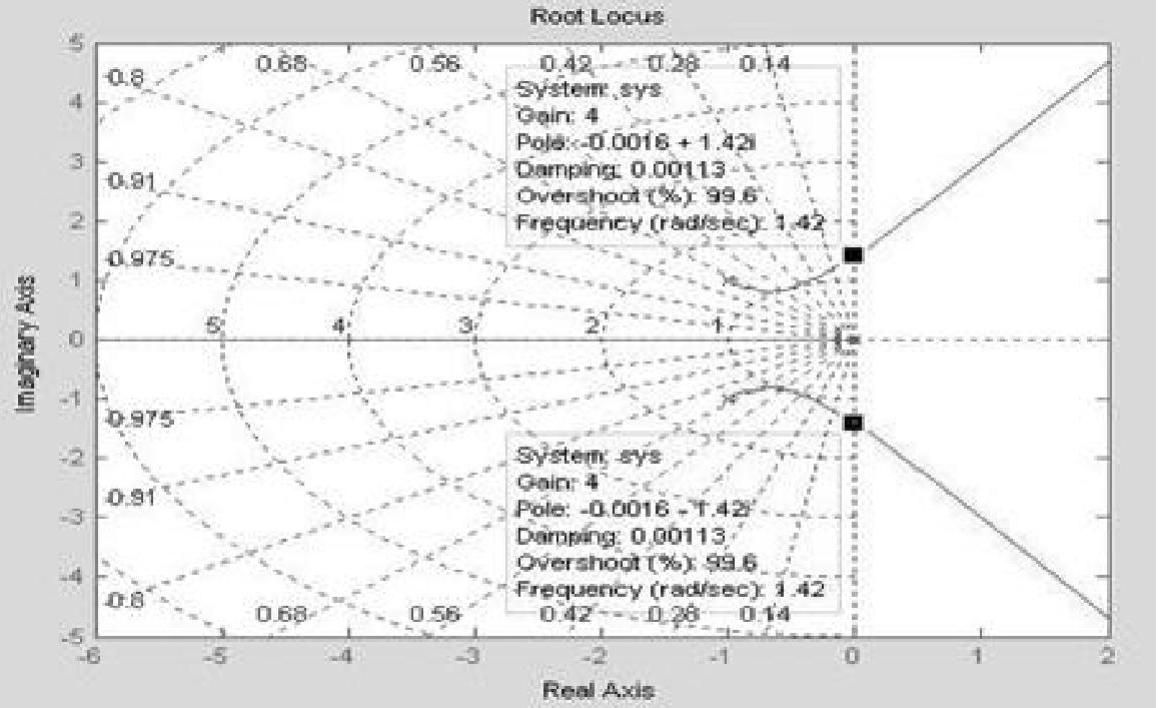
图8-4 系统根轨迹图
程序运行后,绘制系统阶跃响应曲线如图8-5所示。程序运行当绘制出第1幅图后,按下键盘的任意键则绘制第2幅图,依此类推,待完全退出后才能进行其他操作。
3)三条系统阶跃响应曲线比较分析。
由图8-5所示曲线可看出,K=2的曲线,其根轨迹在复平面纵轴的左边,对应系统闭环稳定,单位阶跃响应有超调,是衰减的振荡。K=4时对应系统为临界稳定,阶跃响应为等幅振荡。K=6的曲线,其根轨迹在复平面纵轴的右边,对应系统闭环不稳定,单位阶跃响应是发散的振荡。
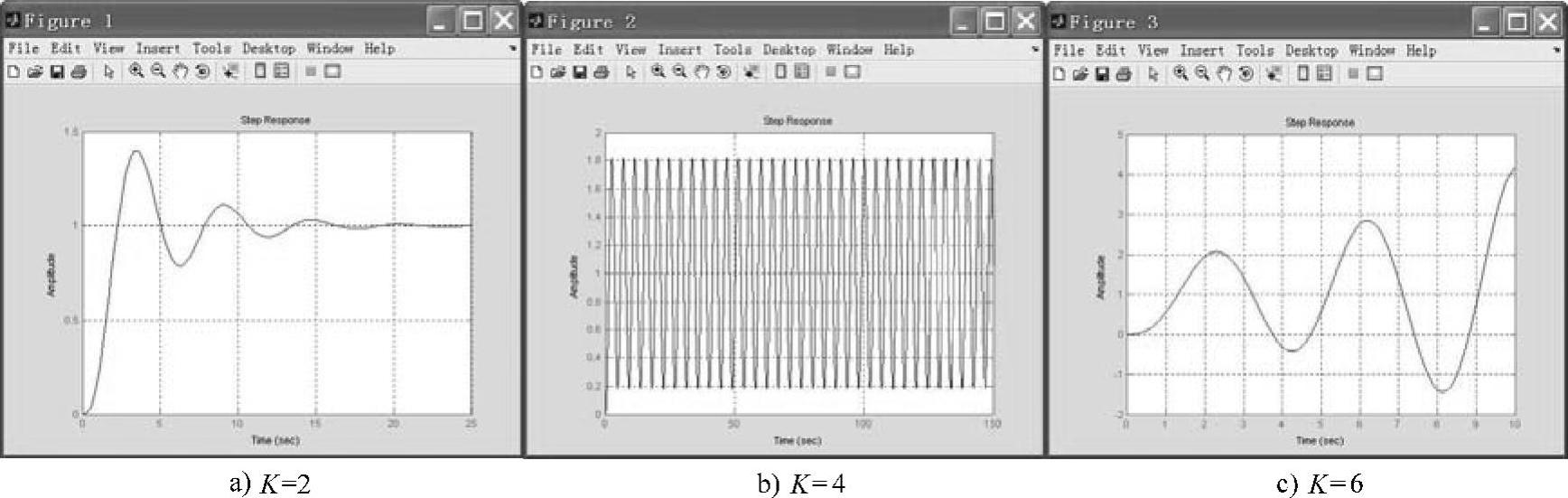
图8-5 系统阶跃响应曲线
【例8-3】 设单位负反馈系统开环传递函数为 ,1)试绘制该系统根轨迹;
,1)试绘制该系统根轨迹;
2)在根轨迹图上,计算设置在最佳阻尼线(即复平面中与负实轴成±45°的夹角线)附近的闭环极点;3)绘制其对应系统阶跃响应曲线并分析。
解:1)绘制系统的根轨迹。
clear;n=1;d=conv([10],[0.51]);
sys=tf(n,d);rlocus(sys),grid;
[k,poles]=rlocfind(sys,-1.0000+1.0000i),
程序执行后,可得系统根轨迹图如图8-6所示。计算出当开环根轨迹增益K=1时,系统闭环特征根(即闭环极点)poles1.2=-1±j1。在最佳阻尼线即与负实轴成±45°的夹角线附近的闭环极点就是poles1.2=-1±j1。
2)计算系统的闭环传递函数与阻尼比。
clear;syms s n d phi;n=1;
d=expand(s∗(0.5∗s+1)+1);phi=factor(n/d),
程序运行结果 。
。
clear;syms s omegan zeta;omegan=vpa(sqrt(2),4),
[zeta]=solve( 2∗zeta∗1.414=2
2∗zeta∗1.414=2 );zeta=vpa(zeta,3),
);zeta=vpa(zeta,3),
程序运行结果ζ=0.707。
3)绘制系统的阶跃响应曲线。
clear;n=2;d=[122];phi=tf(n,d);step(phi),grid;
[y,t]=step(phi);key=2;[sigma,tp,ts]=perf(key,y,t);
程序运行后,绘制系统阶跃响应曲线如图8-7所示。当K=1时,系统的闭环极点正好在最佳阻尼线(即复平面中与负实轴成45°的夹角线)上,其阻尼比ζ=0.707。由图8-7可看出,系统阶跃响应超调小(4.4565%),调节时间短(ts=4.2387s),正是二阶系统最佳响应。
【例8-4】 已知一负反馈系统开环传递函数为 ,1)绘制系统的根轨迹并证明复平面上根轨迹是圆;2)试确定系统呈现欠阻尼状态时的开环增益的范围;3)试求系统最小阻尼比时的闭环极点。
,1)绘制系统的根轨迹并证明复平面上根轨迹是圆;2)试确定系统呈现欠阻尼状态时的开环增益的范围;3)试求系统最小阻尼比时的闭环极点。
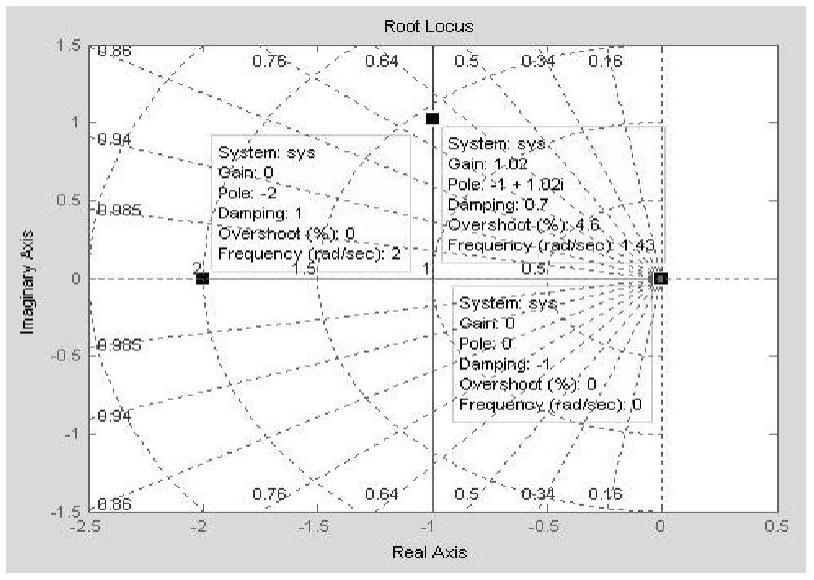
图8-6 系统根轨迹图
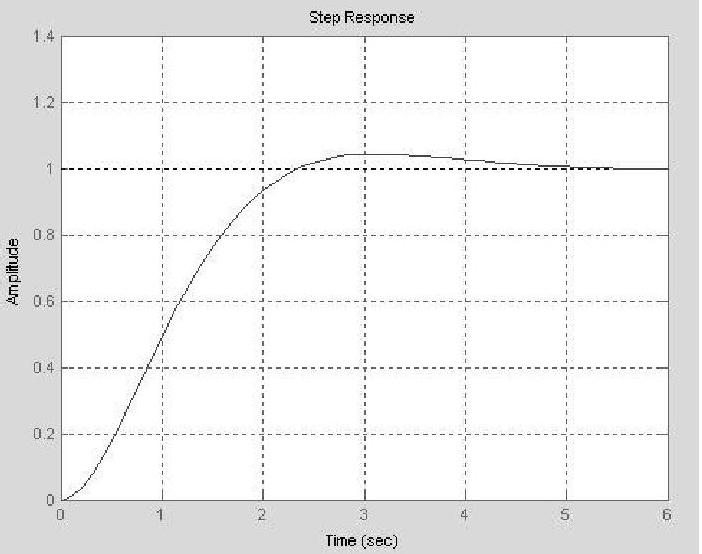
图8-7 系统阶跃响应曲线
解:1)证明复平面上根轨迹是圆。
①当s=σ+jω时求系统闭环特征方程的实部与虚部。
clear;syms s D;syms K sigm omega real;
D=s∗(s+2)+K∗(s+3);D=subs(D,[s],[sigm+j∗omega]);D=expand(D);
Re=collect(real(D),K),Im=expand(imag(D)),
程序运行结果Re[D]=σ2+2σ+K(σ+3)-ω2、Im[D]=2σω+2ω+Kω。
②系统闭环特征方程D(s)=0是一复数方程,其实部与虚部均为0。由Re[D]=0求出K。
clear;syms K sigm omega real;(https://www.xing528.com)
[K]=solve( 2∗sigm∗omega+2∗omega+K∗omega=0
2∗sigm∗omega+2∗omega+K∗omega=0 ,K),
,K),
程序运行结果K=-2∗sigm-2。
③由系统闭环特征方程D(s)=0的虚部Im[D]=0求出σ与ω间的关系。
clear;syms K sigm omega real;
Re=subs( (sigm+3)∗K+sigm^2+2∗sigm-omega^2
(sigm+3)∗K+sigm^2+2∗sigm-omega^2 ,[K],[-2∗sigm-2]);
,[K],[-2∗sigm-2]);
Re=expand(Re),
程序运行结果-σ2-6σ-6-ω2=0,那么 。由关系式可知,复平面的横坐标与纵坐标即σ与ω间的关系是一圆,圆心坐标为(-3,j0),半径为
。由关系式可知,复平面的横坐标与纵坐标即σ与ω间的关系是一圆,圆心坐标为(-3,j0),半径为 。
。
2)确定系统呈现欠阻尼状态时的开环增益的范围。
当欠阻尼时,系统闭环有两个不相等的负实根,那么系统根轨迹应在实轴上的两分离点之间。先计算分离点。
clear;syms d;
[d]=solve( 1/(d-0)+1/(d+2)=1/(d+3)
1/(d-0)+1/(d+2)=1/(d+3) ,d);d=vpa(d,4),
,d);d=vpa(d,4),
程序运行结果
d=-1.268
-4.732
①对第一个分离点(在分离点处的特征方程为D(d1)=0)。
clear;syms s K;D=s∗(s+2)+K∗(s+3);
D=subs(D,[s],[-1.268]);D=vpa(D,4),
程序运行结果D=-0.9282+1.732∗K。
②解方程求K。
clear;syms K;[K]=solve( -.9282+1.732∗K=0
-.9282+1.732∗K=0 ,K);
,K);
K=vpa(K,4);K=vpa(K∗3/2,4),
程序运行结果K=0.8038。
③对第二个分离点(在分离点处的特征方程为D(d2)=0)。
clear;syms s K;D=s∗(s+2)+K∗(s+3);
D=subs(D,[s],[-4.732]);D=vpa(D,4),
程序运行结果D=12.93-1.732∗K。
④解方程求K。
clear;syms K;[K]=solve( 12.93-1.732∗K=0
12.93-1.732∗K=0 ,K);
,K);
K=vpa(K,4);K=vpa(K∗3/2,4),
程序运行结果K=11.20,即欠阻尼时的开环增益范围为0.8038<K<11.2。
3)求系统最小阻尼比时的闭环极点。
二阶系统复数极点与负实轴夹角的余弦,即 ,当ζ即cos β为最小值时,β有最大值,即复数极点对坐标原点连线与负实轴的夹角为最大值,此时复数极点应在坐标原点对于圆的切线上。
,当ζ即cos β为最小值时,β有最大值,即复数极点对坐标原点连线与负实轴的夹角为最大值,此时复数极点应在坐标原点对于圆的切线上。
clear;n=[13];d=conv([10],[12]);
sys=tf(n,d);rlocus(sys),grid;
[k,poles]=rlocfind(sys,-2+1.4142i),
程序运行后得到图8-8,单击圆右上方的最外侧处,则得到系统最小阻尼比时的闭环极点poles1.2=-2±j1.4142。
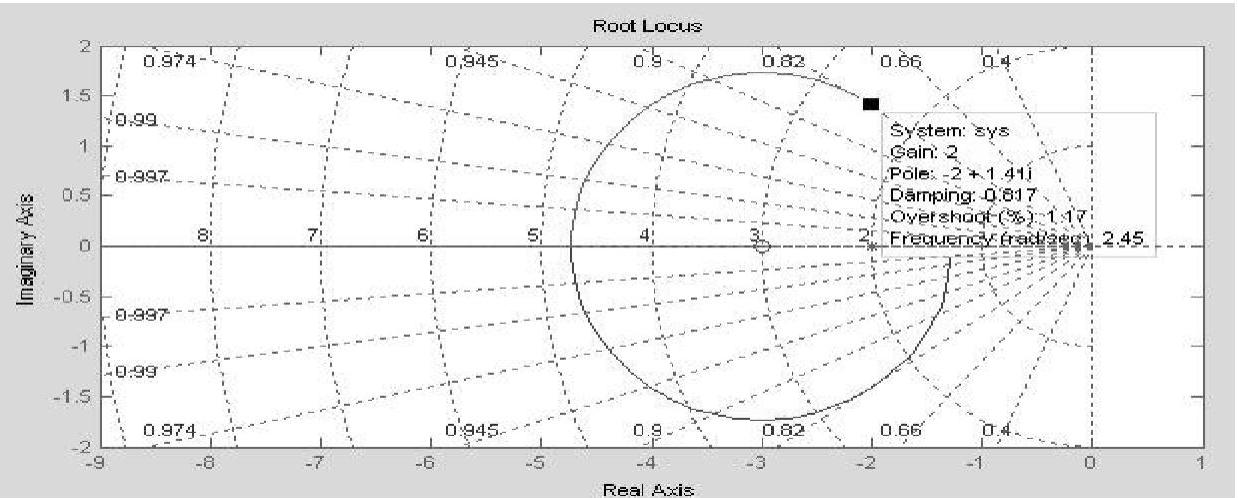
图8-8 单击圆右上方的最外侧处
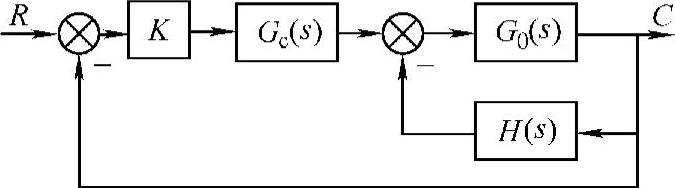
图8-9 系统结构图
【例8-5】 已知系统结构如图8-9所示,其中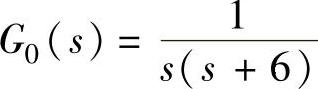 。1)试绘制H(s)=0与串联校正Gc(s)=1+
。1)试绘制H(s)=0与串联校正Gc(s)=1+ +0.0625s时系统根轨迹图,并在系统根轨迹图上找一点使其系统超调量σ%≤10%,确定此时的K;2)试绘制反馈校正H(s)=K1s,K=50与Gc(s)=1时系统根轨迹图,并确定系统阶跃响应超调σ%=4.3%闭环系统主导极点位置及计算相应的K1值。
+0.0625s时系统根轨迹图,并在系统根轨迹图上找一点使其系统超调量σ%≤10%,确定此时的K;2)试绘制反馈校正H(s)=K1s,K=50与Gc(s)=1时系统根轨迹图,并确定系统阶跃响应超调σ%=4.3%闭环系统主导极点位置及计算相应的K1值。
解:1)系统中串联校正 与H(s)=0。
与H(s)=0。
①计算系统开环系统传递函数。clear;syms s G0 H Gc K G phi1;Gc=1+0.5/s+0.0625∗s;G0=1/(s∗(s+6));H=0;phi1=G0/(1+G0∗H);G=factor(K∗Gc∗phi1),
程序运行结果 。
。
②绘制系统根轨迹图。
clear;n=[1168];d=16∗conv([100],[16]);
sys=tf(n,d);rlocus(sys),
程序运行后得到根轨迹图如图8-10所示。
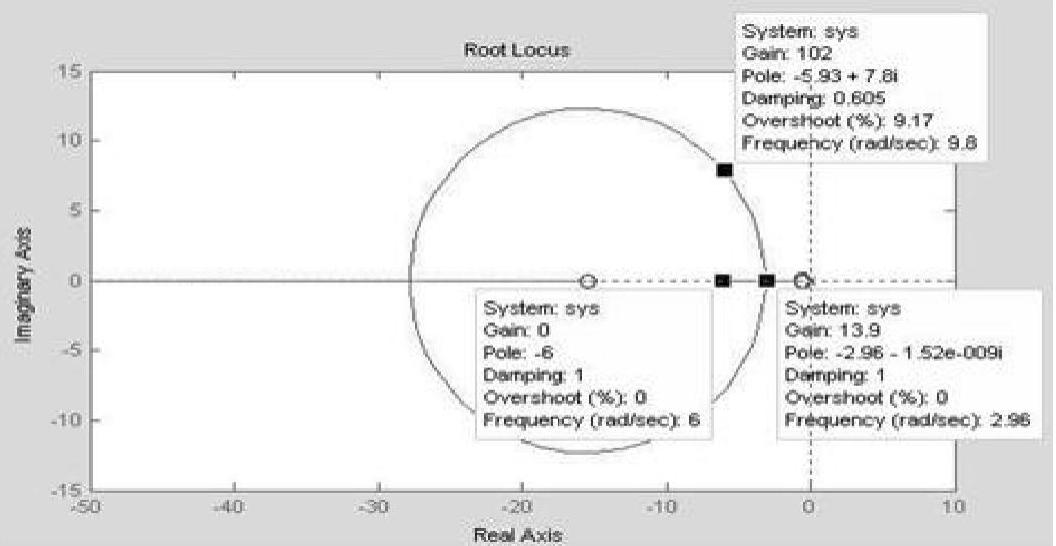
图8-10 系统根轨迹图
由图8-10可知,根轨迹起始开环极点-6处,增益K=0。分离点(-2.96-1.52e-9i)处增益K≈13.9。当选择点(-5.93+7.8i)处时,增益K=102,超调量σ%=9.17%<10%。
再运行以下程序
clear;n=[1168];d=16∗conv([100],[16]);
sys=tf(n,d);rlocus(sys),
[k,poles]=rlocfind(sys,-5.93+7.8 i),
程序运行后得到根轨迹图如图8-11所示。选择同图8-10中增益K=102附近的点,得到类似图8-10所示的结果。
2)当H(s)=K1s,K=50与Gc(s)=1时,系统如图8-12所示。
①求系统开环系统传递函数与闭环传递函数。
clear;syms s G0 H Gc K K1 G phi1;
K=50;Gc=1;G0=1/(s∗(s+6));H=K1∗s;
phi1=G0/(1+G0∗H);G=factor(K∗Gc∗phi1),
phi=simple(G/(1+G)),
程序运行结果 、
、 ,对应系统闭环特征方程为D(s)=s2+6s+K1s+50=s2+6s+50+K1s=0,使具有相同闭环特征方程,可构造新的单位负反馈系统:
,对应系统闭环特征方程为D(s)=s2+6s+K1s+50=s2+6s+50+K1s=0,使具有相同闭环特征方程,可构造新的单位负反馈系统: 。
。
②对系统等效开环传递函数绘制系统根轨迹图,并确定系统阶跃响应超调σ%=4.3%闭环系统主导极点的位置及计算相应的K1值。
clear;n=[10];d=[1650];sys=tf(n,d);rlocus(sys),
[k1,poles]=rlocfind(sys,-5.0000+5.0000i),
程序运行后绘制系统根轨迹图,如图8-13所示。图8-13中显示数据与计算数据一致:当增益K1=4,闭环系统极点poles1.2=-5±j5,阻尼比ζ=0.707、σ%=4.32%。
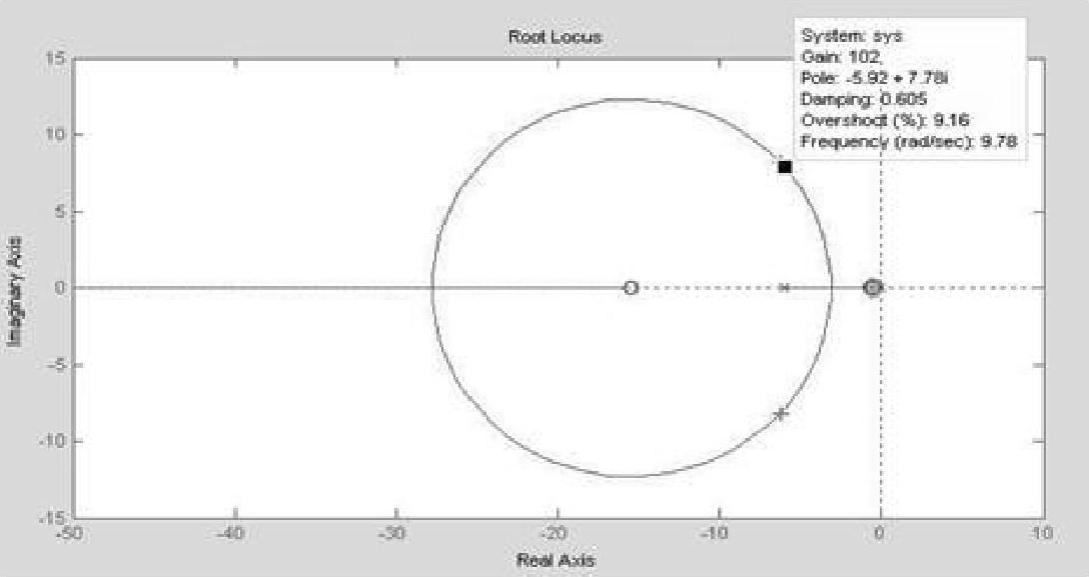
图8-11 选择程序绘制的系统根轨迹图
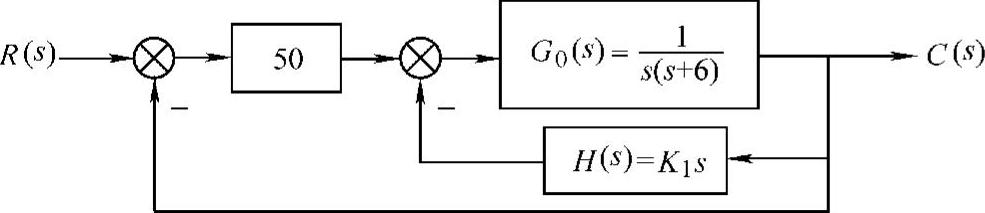
图8-12 当H(s)=K1s、K=50、Gc(s)=1时系统
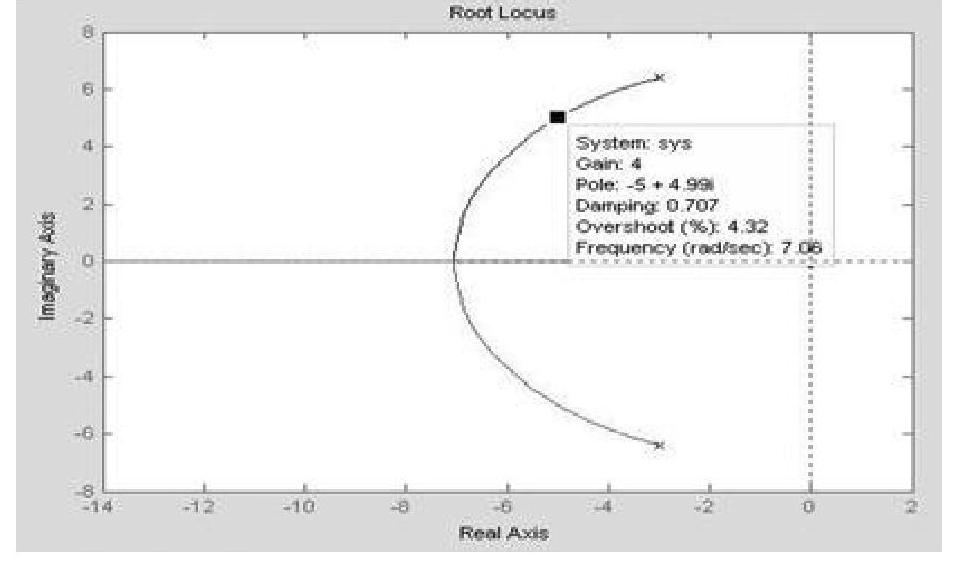
图8-13 等效开环传递函数的系统根轨迹图
③根据闭环特征方程根 ,现
,现 。
。
clear;syms zeta omegan;
[zeta]=solve( zeta∗omegan=omegan∗sqrt(1-zeta^2)
zeta∗omegan=omegan∗sqrt(1-zeta^2) );
);
zeta=vpa(zeta,4),
程序运行后结果说明图8-13中显示数据正确。
3)由系统闭环特征式验证K1。由等效开环传递函数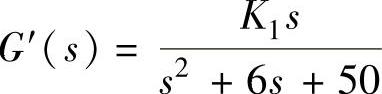 与系统闭环特征式D(s)=s+(6+K1)s+50,可验证K1。
与系统闭环特征式D(s)=s+(6+K1)s+50,可验证K1。
clear;syms s zeta omegan K1;omegan=sqrt(50);
[K1]=solve( 2∗0.7077∗sqrt(50)=6+K1
2∗0.7077∗sqrt(50)=6+K1 ,K1);K1=vpa(K1,2),
,K1);K1=vpa(K1,2),
程序运行结果K1=4。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。