



1.直接绘制根轨迹图形,不返回根轨迹参数
命令
绘制如图3-5-2所示的单输入单输出系统的根轨迹图,计算机自动选择反馈增益K在0→∞内变化。num,den分别表示系统传递函数分子与分母多项式系数矢量。sys可以是tf或zpk模型。对于零极点增益模型,rlocus(Z,P,K)是无效命令,而rlocus(zpk(Z,P,K))是有效命令。

该命令用于用户自己规定增益的变化范围。数组增益k的常用格式为

命令中k1,k2分别表示仿真时增益的上、下限,dk表示仿真时k值的变化步长。dk也可以省略,计算机会自主决定仿真步长。
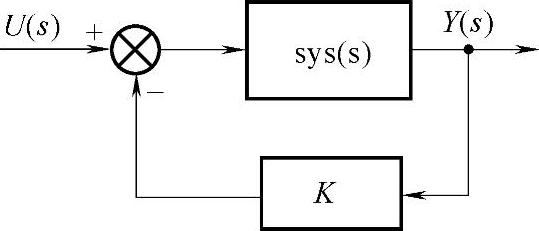
图3-5-2 反馈增益为K的闭环系统
2.在已作出的根轨迹图上确定任意点对应的增益K和闭环极点值

在已经作出根轨迹图之后运行该命令,计算机会在已作出的根轨迹图形窗口上出现可移动长十字线光标。鼠标拖动十字光标移动并单击在窗口内选择的一点,计算机会在命令窗口返回选择点坐标、与选择点相关的增益k和与k对应的闭环极点数组p等3组数据。计算机将该组极点的位置用小十字线标记在根轨迹上。注意,返回的选择点坐标不一定是十字光标中心坐标,也不一定在根轨迹上。
3.返回根轨迹增益及对应闭环极点,不作图

用于返回增益k及对应的闭环极点数组。k的格式为1行length(k)列。闭环极点数组格式为n行(n为系统阶数),列数与k相同。每个k值对应一组闭环极点。该命令通常用于在设计时根据性能指标要求选择期望闭环极点和对应的根轨迹增益。

程序中增益k由用户自己决定,返回与增益对应的闭环极点数组。

运行此命令,右端输入所期望的闭环极点数组px。计算机在命令窗口返回增益k及其对应的一组闭环极点pole,不作图。本条命令在赋值系统num,den后即可执行,不受是否已作出根轨迹图的限制。返回极点pole通常只是靠近期望极点px而并不完全重合。
4.使用plot命令绘制根轨迹图
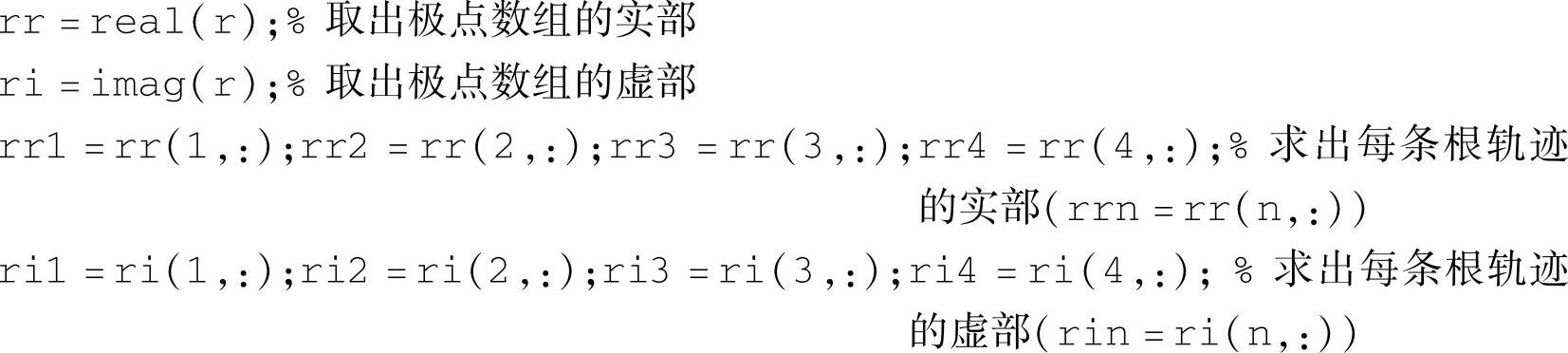
有时根据返回的闭环极点数据使用plot命令绘制根轨迹图更便于编辑和应用。由于闭环极点通常包含复数极点,所以绘图前必须先求出极点的实部与虚部。设经过[r,k]=rlocus(sys)或r=rlocus(sys,k)命令已经获得极点数组r,设系统阶次为n(示例n=4),参考程序如下:
如果只对其中某一条或某几条根轨迹曲线感兴趣,也可以只绘制感兴趣的根轨迹曲线。适当选择增益的范围或者使用axis([x1,x2,y1,y2])编辑图幅坐标范围,可以更清楚地显示根轨迹曲线,也更有利于理解根轨迹图形变化的基本规则。
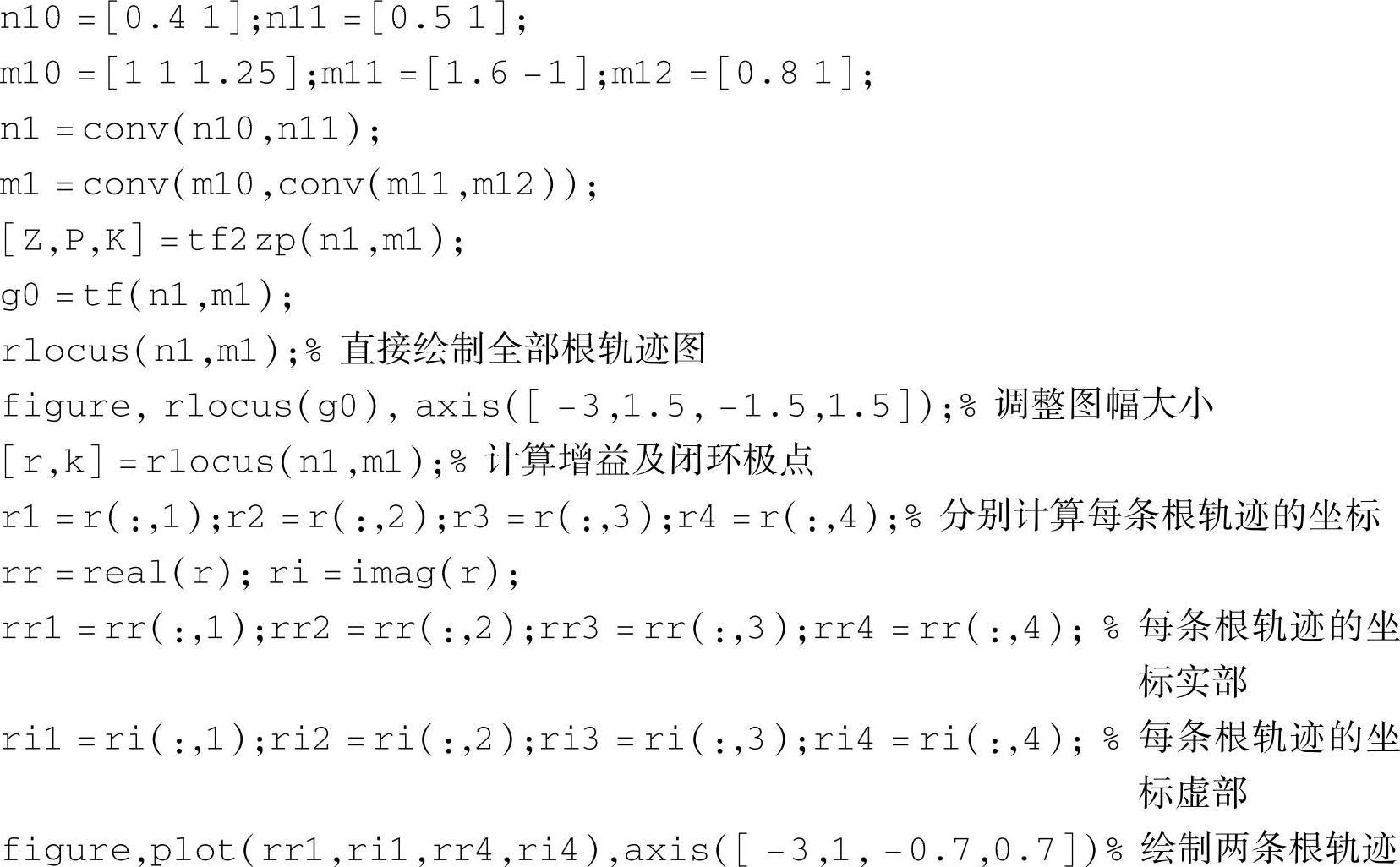
【例3-3】绘制开环传递函数式(3-5-10)的根轨迹曲线,并比较rlocus命令与plot命令的结果。

参考程序如下:
 (https://www.xing528.com)
(https://www.xing528.com)

运行上述程序,部分结果如图3-5-3所示。其中,图3-5-3a表示由命令rlocus(n1,m1)直接绘制的根轨迹曲线,增益K由计算机规定在0→∞内变化。由于各闭环极点数值上的巨大差异,两条实根轨迹的变化细节比较模糊。
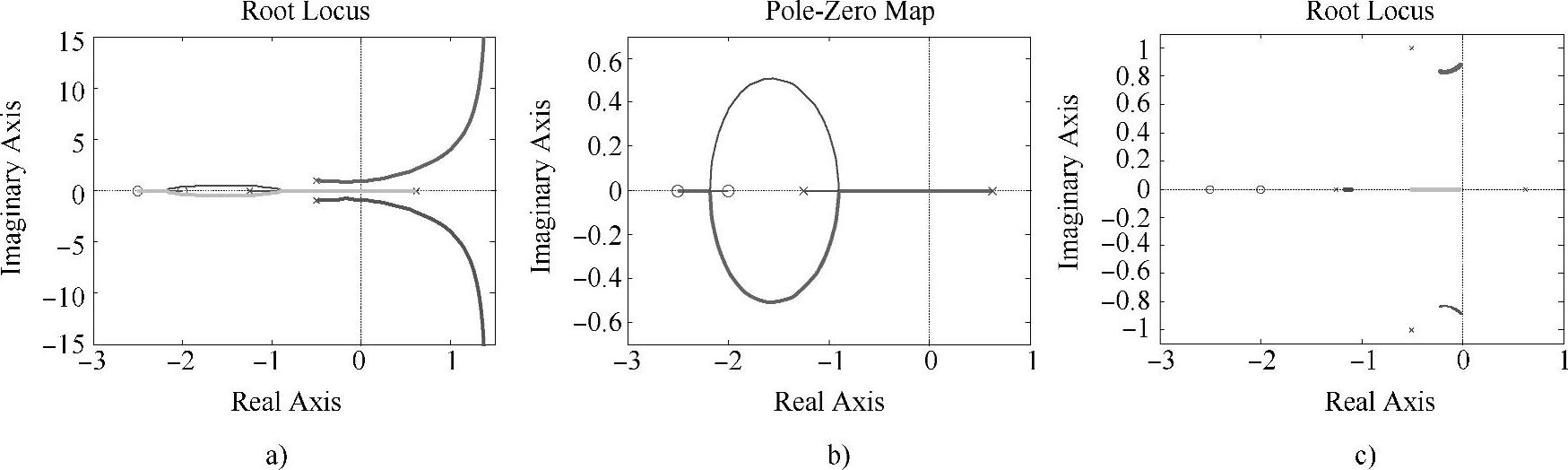
图3-5-3 系统式(3-5-10)的部分根轨迹图
图3-5-3b使用命令plot作图,绘制式(3-5-10)的两个闭环实极点在K由0→∞变化时的轨迹。由于选择了适当大小的图形窗口,所以两个实根轨迹的走向、起点和终点、汇合点与分离点、何时演变为一对共轭复根等情况都看得更清楚。图3-5-3c采用用户设定的增益范围,由命令rlocus(n1,m1,[1.28:0.01:1.8])绘制一小段根轨迹曲线。由图可见,对于非最小相位系统式(3-5-10),当增益处于[1.28,1.8]范围内时,所有闭环极点都位于复平面的左半部分,即对应的闭环系统是稳定的。这对于通过调整增益使处于内环中的非最小相位系统变得稳定具有实用意义。
5.状态空间模型的根轨迹图
经典控制中的根轨迹图只适于单输入单输出系统。对于单输入单输出系统的状态空间模型,如果仅限于讨论输出反馈,上述各条命令格式仍然适用,只需预先构造状态空间模型,例如

然后使用与上述根轨迹命令相应的格式即可。例如
对于多输入多输出系统的状态空间模型,直接使用上述命令不能作出根轨迹图形。如果把状态空间模型中的传递函数矩阵作为研究对象,该矩阵中的各元仍然是一个单输入单输出系统,讨论输出反馈时,上述各条根轨迹仿真命令仍然适用。于是,首要问题是如何方便地构造传递函数矩阵。下面介绍直接由状态空间模型∑(A,B,C,D)表达传递函数矩阵中的各个元素的程序。
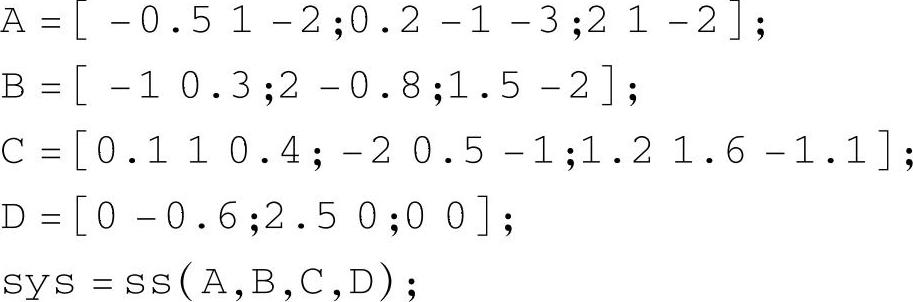
【例3-4】传递函数矩阵中各元的状态空间模型表达。
设一个三阶三输出二输入系统为
参见式(1-3-3)及式(1-3-4),传递函数矩阵中的各元为

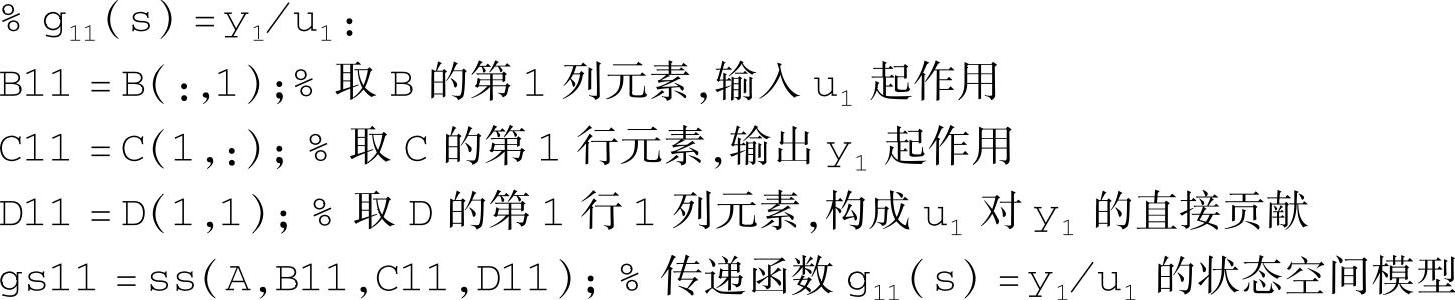
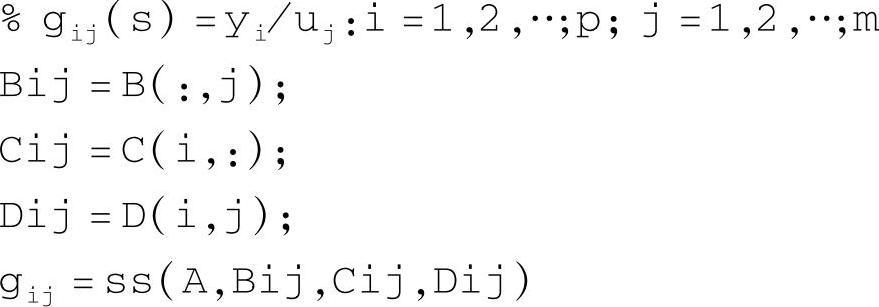
在构造传递函数矩阵中各元的状态空间模型时,系统矩阵A不需改变,输入矩阵取原B矩阵的第j列元素,序号j与输入uj的序号j一致;输出矩阵取原C的第i行元素,序号i与输出yi序号i一致;直传矩阵取原D的第i行,第j列元素。具体格式为(以g11(s)=y1(s)/u1(s))为例)
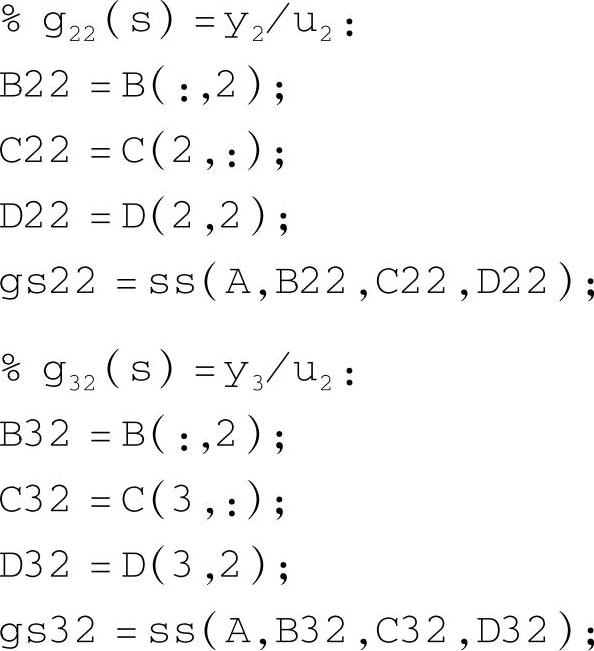
类似地,传递函数矩阵中其余各元可表示为
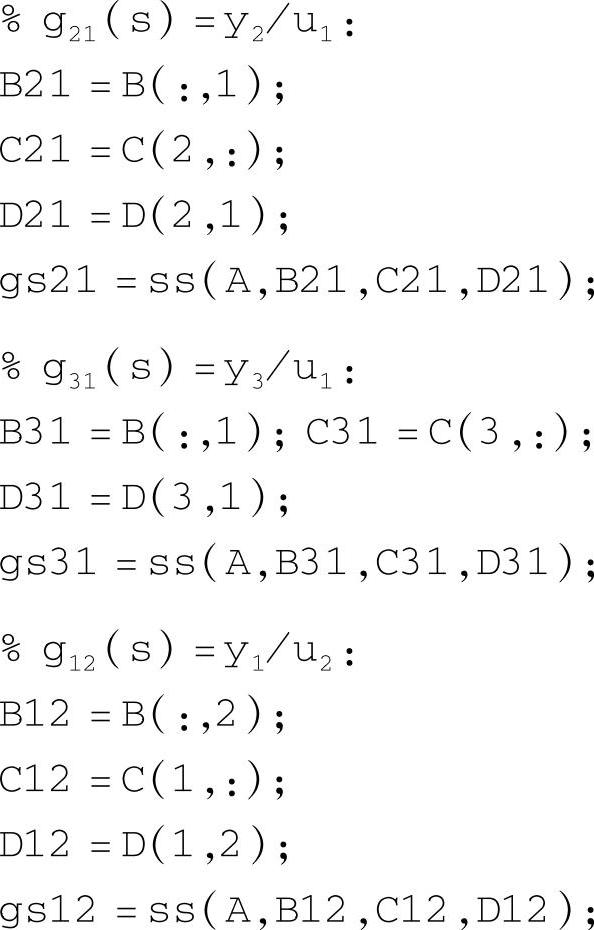
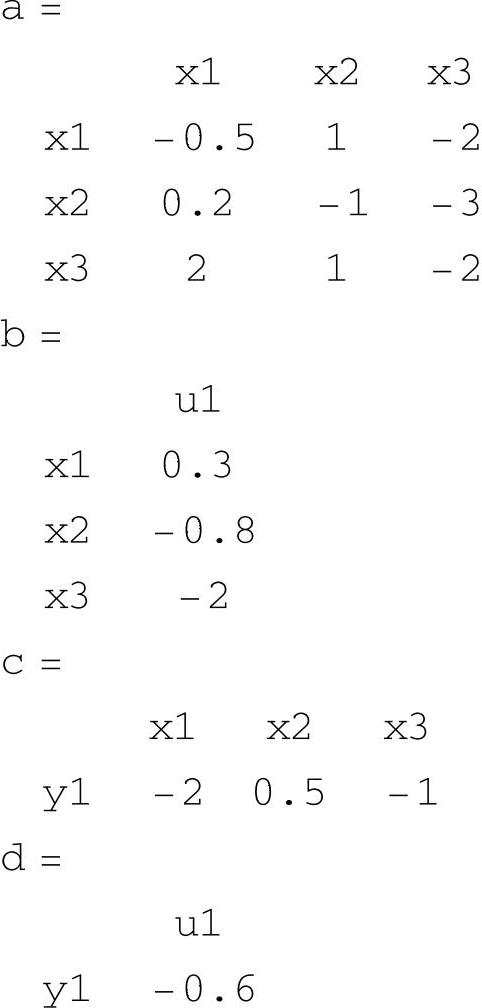
以上述∑(A,B,C,D)的具体数值,运行g12(s)=y1/u2,结果如下:
综上,可以写出传递函数矩阵中各元构造的通用程序如下:
当然,也可以使用第1章所述模型转换的方法获得传递函数矩阵,然后再将各元素表达成状态空间模型。仿真表明,这些方法所得结果是一致的。只不过上述程序更为直接。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。