



1.用途
步进电动机又称为脉冲电动机,是一种用电脉冲信号进行控制,并将电脉冲信号转换成相应的角位移或直线位移的执行元件。
一般电动机都是连续旋转的,而步进电动机,则是一步一步转动的,它是由专用电源供给电脉冲,每输入一个电脉冲信号,电动机就转过一个角度,如图6-9所示。步进电动机也可以直接输出线位移,每输入一个电脉冲信号,电动机就走一段直线距离。
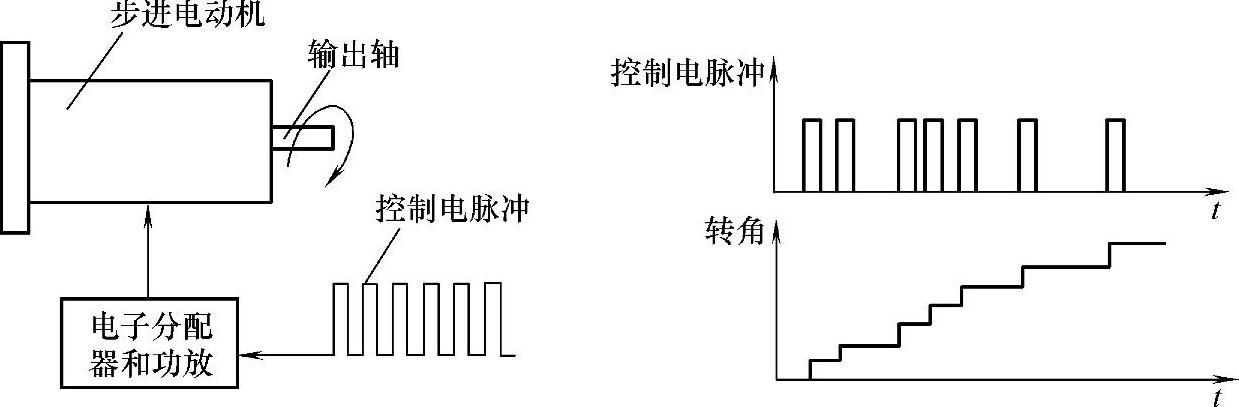
图6-9 步进电动机的功用
步进电动机的步距角和转速不受电源电压波动和负载变化的影响,也不受环境条件如温度、气压、冲击和振动等影响,仅与脉冲频率有关。它每转一周都有固定的步数,在不丢步的情况下运行,其步距误差不会长期积累,即每一步虽然有误差,但转过一周时,累积误差为零。通过改变脉冲频率就可以在很大范围内调节电动机的转速,而且能够快速起动、制动和反转。如果停机后某些相绕组仍保持通电状态,还具有自锁能力。由于以上这些特点,步进电动机日益广泛地应用于数字控制系统中,例如数控机床、绘图机、自动记录仪表、数/模变换装置以及航空、导弹、无线电等工业中。
2.分类
步进电动机的种类很多,按运动形式分有旋转式步进电动机、直线步进电动机和平面步进电动机。按励磁方式分类,步进电动机可分为反应式、永磁式和感应子式等。按工作方式分类,步进电动机可分为功率式和伺服式,前者能直接带动较大的负载,后者仅能带动较小负载。其中反应式步进电动机用得比较普遍,结构也较简单。
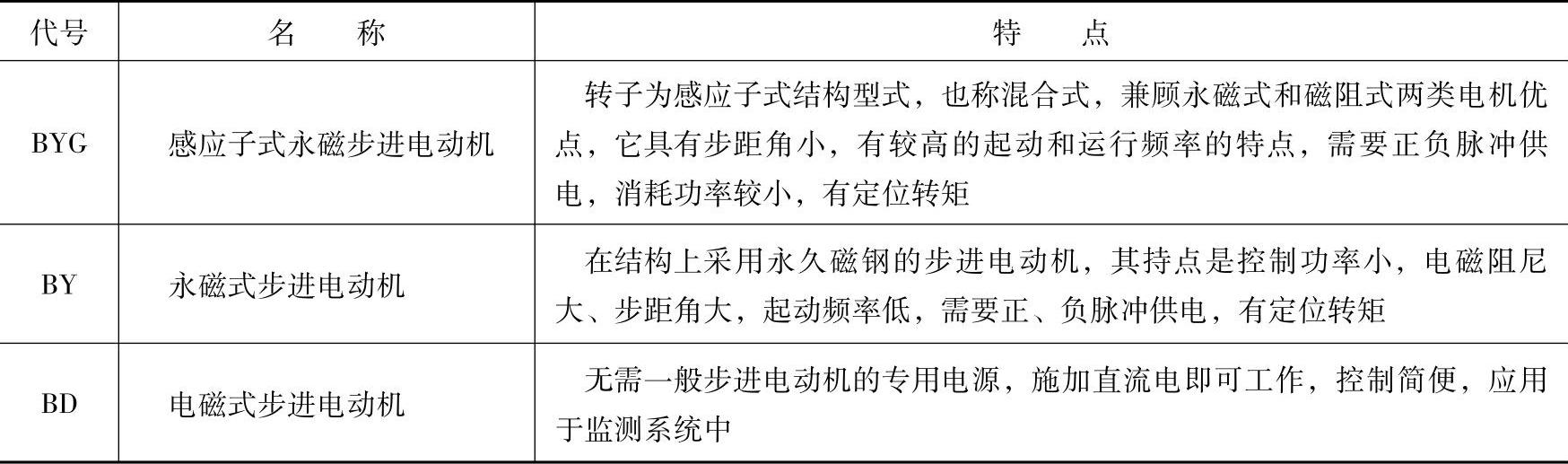
步进电动机的分类和特点见表6-30。
表6-30 步进电动机的分类和特点

(续)
3.通电方式和步距角
(1)反应式步进电动机的通电方式
定子控制绕组每改变一次通电方式,称为一拍。此时电动机转子所转过的空间角度称为步距角θS。
三相反应式步进电动机的通电方式主要有以下三种:
1)三相单三拍通电方式:按U→V→W→U顺序通电,若改成U→W→V→U顺序通电,则电动机转向相反。
2)三相单、双六拍通电方式:按U→UV→V→VW→W→WU→U顺序通电,或按U→UW→W→WV→V→VU→U顺序通电。也就是说,先接通U相;以后再同时接通U、V相;然后断开U相,使V相单独接通;再同时接通V、W相,依此进行。其特点是三相控制绕组需经6次切换才能完成一个循环,故称为“六拍”,而且通电时,有时是单个绕组接通,有时又为两个绕组同时接通,因此称为“单、双六拍”。
3)三相双三拍通电方式:按UV→VW→WU→UV顺序通电,或按UW→WV→VU→UW顺序通电。(https://www.xing528.com)
(2)反应式步进电动机的步距角
步进电动机的步距角θS的大小是由转子的齿数zR、控制绕组的相数M和通电方式所决定的。它们之间存在以下关系:
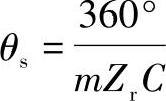
式中,C为状态系数,当采用单三拍和双三拍通电方式运行时,C=1;而采用单、双六拍通电方式运行时,C=2。
若步进电动机通电的脉冲频率为F(拍/S或脉冲数/S),则步进电动机的转速n(R/MIn)为
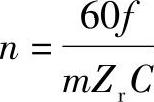
由此可知,相数和转子齿数越多,步距角越小,转速也越低。在同样脉冲频率下,转速越低,其他性能也有所改善,但相数越多,电源越复杂。目前步进电动机一般做到六相,个别的也有做成八相或更多相数。
(3)永磁式步进电动机的步距角
一般来说,永磁式步进电动机步距角的值为
式中,M为相数;P为转子极对数。
永磁式步进电动机需要电源供给正、负脉冲,否则不能连续运转,这会使电源的线路复杂化。这个问题也可以这样来解决,就是在同一个极上绕两套绕向相反的绕组,这样虽增加了用铜量和电动机的尺寸,但简化了对电源的要求,即电源只要供给正脉冲就可以了。
这种步进电动机的步距角大,起动和运行频率低。但是它消耗的功率比反应式步进电动机小,在断电情况下有定位转矩,有较强的内阻尼力矩。
(4)感应子式步进电动机的步距角
当定子各相绕组按顺序通以正、负电脉冲时,转子每次将转过一个步距角θS,其值为
式中,M为相数;zR为转子齿数。
这种步进电动机也可以做成较小的步距角,因而也有较高的起动和运行频率;消耗的功率也较小;并具有定位转矩,兼有反应式和永磁式步进电动机两者的优点。但是它需要有正、负电脉冲供电,并且制造工艺比较复杂。
永磁感应子式步进电动机中的恒定励磁是由转子上的永久磁铁产生的,永久磁铁性能不太稳定,转动惯量比较大,无论在装配上和制造上都不太方便。如果在定子轴向放置励磁绕组,并通以直流电流励磁来代替永久磁铁,这就成了电磁感应子式步进电动机,其工作原理与永磁感应子式步进电动机完全相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。