



(1)指令功能 控制系统提供了一系列不同的方法编程圆弧运动。实际上可以直接按照各种图样的标注尺寸选择编程指令。圆弧插补运动通过以下几点来描述:
1)以绝对尺寸或相对尺寸表示的圆心和终点,即标准模式。
2)以直角坐标表示的半径和终点的方式。
3)以直角坐标中的张角和终点或者给出地址的圆心方式。
4)以极坐标,带有极角AP=...和极半径RP=...的方式。
5)以中间点和终点的方式。
6)以终点和起点上的正切方向的方式。
如图3-22所示,控制系统需要指定工作平面(G17~G19)计算圆弧的旋转方向。G2为顺时针方向旋转,G3为逆时针方向旋转。
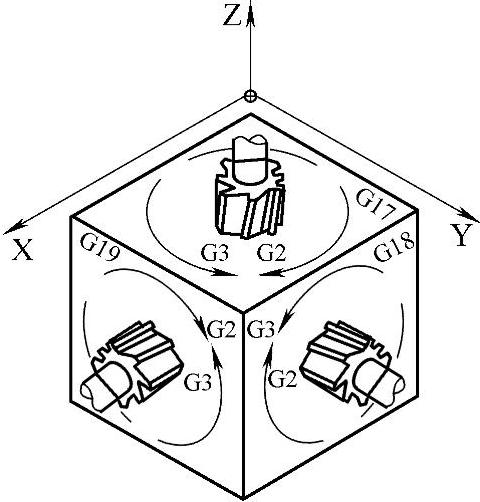
图3-22 不同工作平面的圆弧插补方向
(2)编程格式
G2/G3 X...Y...Z...I=AC(...)J=AC(...)K=AC(...)
;圆心和终点绝对值以工件零点为基准(https://www.xing528.com)
G2/G3 X...Y...Z...I...J...K.. ;相对尺寸中的圆心以圆弧起点为基准
G2/G3 X...Y...Z...CR=...
;以CR=...给定圆弧半径,以直角坐标系X,Y,Z给定圆弧终点
G2/G3 X...Y...Z...AR=...
;以AR=...给定张角,以直角坐标系X,Y,Z给定终点
G2/G3 I...J...K...AR=...
;以AR=...给定张角,通过地址I,J,K给定终点
G2/G3 AP=...RP=... ;极坐标中通过AP=...给定极角,通过RP=...给定极半径
CIP X...Y...Z...I1=AC(...)J1=AC(...)K1=(AC...)
;通过地址I1=,J1=,K1=下的中间点,以直角坐标系X,Y,Z给定终点
CT X...Y...Z... ;通过起点和终点的圆弧以及起点上的切线方向
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。