



(1)模具图(图8-12)
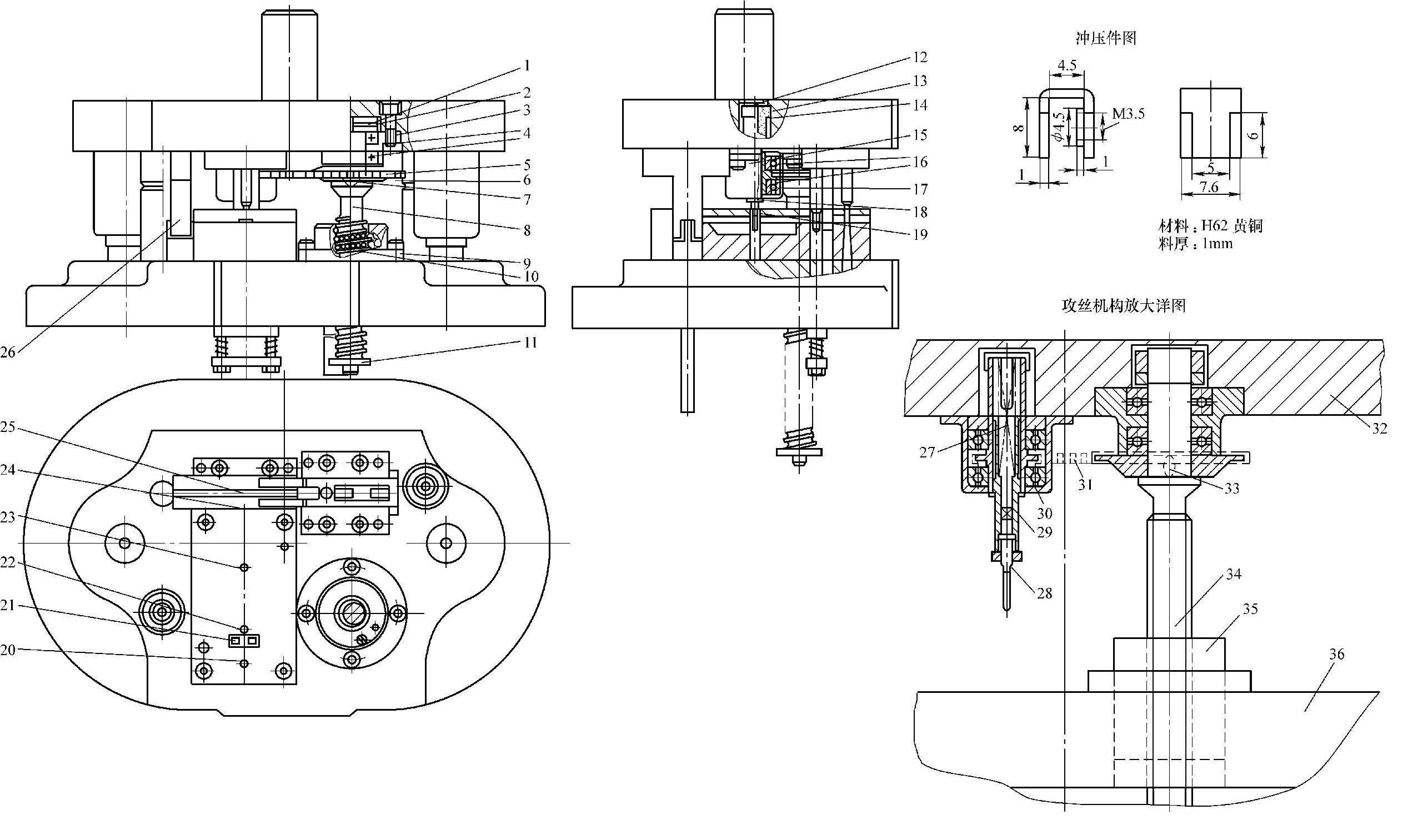
图8-12 触头滑动导向中间导柱模架预冲孔、翻边、攻丝、切断、弯曲、整形七工位连续式复合模
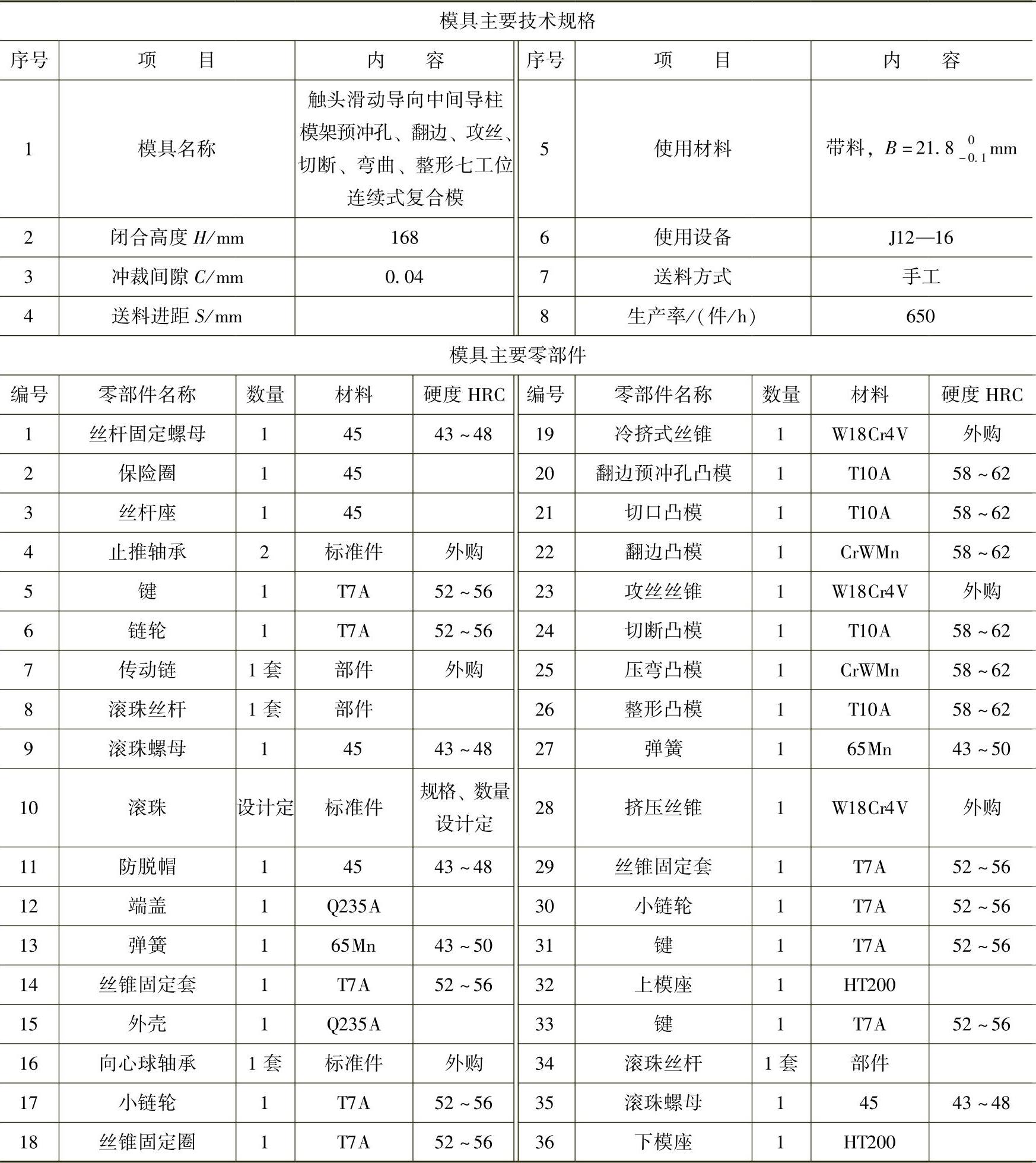
(2)模具主要技术规格及零部件(表8-12)
表8-12 模具主要技术规格及零部件
(3)分析说明
图8-12所示复合模,可用料厚t=1mm、料宽B=21.80-0.1mm的H62黄铜冷轧带料,在公称压力为160kN的国产开式单柱活动台偏心压力机上大量生产触头冲压件。该冲压件尺寸小,是一个一边带有M3.5螺孔的U形件,螺孔是经预冲孔翻边、攻丝获得其翻边凸缘高1mm,外径ϕ4.5mm,在U形件内边中部。
设计冲压工步为:预冲孔、切口、翻边、攻丝、切断、弯曲、整形七个工步。除了攻丝机构外,完成其他工序的多工位连续模为滑动导向中间导柱模架固定卸料结构。这类连续模结构设计已为大家所熟悉,这里仅以攻丝机构作为介绍的重点。(https://www.xing528.com)
这套机构可分两部分:零件1~11为原动部分,12~19为从动部分。
原动部分由固定螺母1、保险圈2、丝杆座3、止推轴承4、键5、链轮6、传动链7、滚珠丝杆8、滚珠螺母9、滚珠10、防脱帽11组成。
从动部分由端盖12、弹簧13、丝锥固定套14、外壳15、向心球轴承16、小链轮17、丝锥固定圈18、丝锥19组成。
动作原理:原动部分的滚珠丝杆8和滚珠螺母9把冲床滑块的下、上直线运动转变为旋转运动。当滑块下降时,压力通过模板、丝杆座3、止推轴承4传递给滚珠丝杆8,把滚珠丝杆8往下压。但由于滚珠螺母9固定在下模板上、既不能向下移动,也不能转动。而在滚珠丝杆8与滚珠螺母9之间装满了滚珠10,使两者螺纹间的滑动摩擦转变成为自锁角很小(约6′)的滚动摩擦,所以当丝杆8被下压时,由于丝杆8与螺母9的螺纹导程角(6°42′)远大于滚动摩擦自锁角,滚珠丝杆8便顺其螺纹的旋向作旋转向下的运动。当滑块回升时,拉力由螺钉、丝杆座3、止推轴承4、丝杆固定螺帽1传递给滚珠丝杆8,把滚珠丝杆8往上拉,这时丝杆8随着冲床滑块并作反向旋转往上回升。这样滚珠丝杆8除随着滑块的下、上运动外,还作正、反向的旋转运动。
滚珠丝杆8的旋转运动由键5、链轮6、传动链7传递给从动部分的小链轮17。小链轮17则通过在其内圆上的花键槽传递给丝锥固定套14,从而带动丝锥作正反向的旋转运动,即模拟攻丝的动作,以达到攻丝的目的。
丝锥19是采用无切削槽的冷挤式丝锥,目的是要使其在攻丝时不产生金属屑。因为在攻丝后还有切断、弯曲、整形三道工序,如果采用有切屑丝锥攻丝,那么所产生的金属屑将会不可避免地粘附在材料上,给完成后道工序带来困难,而挤入式的丝锥就轻而易举地解决了问题。
防脱帽11是为了防止模具在保管、维修及搬运时把滚珠丝杆8拉出滚珠螺母9而设的。模具在维修时需把固定滚珠螺母9的螺钉卸下后,才能把上下模分开,而不能把螺杆抽出。这可避免滚珠10逸出而招致麻烦。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。