



WSN应用类型可分为三种,每种应用都有对应的数据通信模式:事件驱动、周期性、按需报告。在事件驱动模式中,一旦检测到规定事件(如火灾),传感器会将感知数据报告给汇聚节点。在周期性报告(或时间驱动)模式中,传感器节点在预定时间点从环境中收集信息,并周期性地将数据发送给汇聚节点。在按需(或查询驱动)模式中,由用户来决定何时收集数据。他们发送指令给WSN,表明他们想接收数据,然后等待所需类型数据按要求格式传送过来。用户甚至可以指定未来报告周期,后续报告将以周期性报告模式发送过来。
在事件驱动报告模式中,目标或事件检测和跟踪是一种典型的应用实例。其目标是检测、分类和定位特殊目标或事件,并跟踪特定区域内的目标或事件。一旦某个事件或目标出现在该区域,目标或事件周围的传感器节点将收集所需信息,并将其报告给汇聚节点。事件驱动报告的一个特性是其实时性要求。这意味着在此类应用中,数据传输延迟是关键问题之一。目标可以分为两类:第一类目标是独立目标,与网络感知区域相比,通常形状比较小。这些目标会产生噪声、光、地震波,这样周围的传感器节点能够检测并对其进行跟踪。典型的实例是部署传感器网络来侦察战场上的部队动向(如坦克和士兵)。一旦坦克开进某个区域,传感器节点将会收集与坦克有关的信息(如位置和速度),并通过多跳通信,将其报告给基站。第二类目标是连续性目标,它分布在网络感知区域的各个角落。典型实例是使用WSN来检测和跟踪扩散的毒气或化学/生物化学液体。
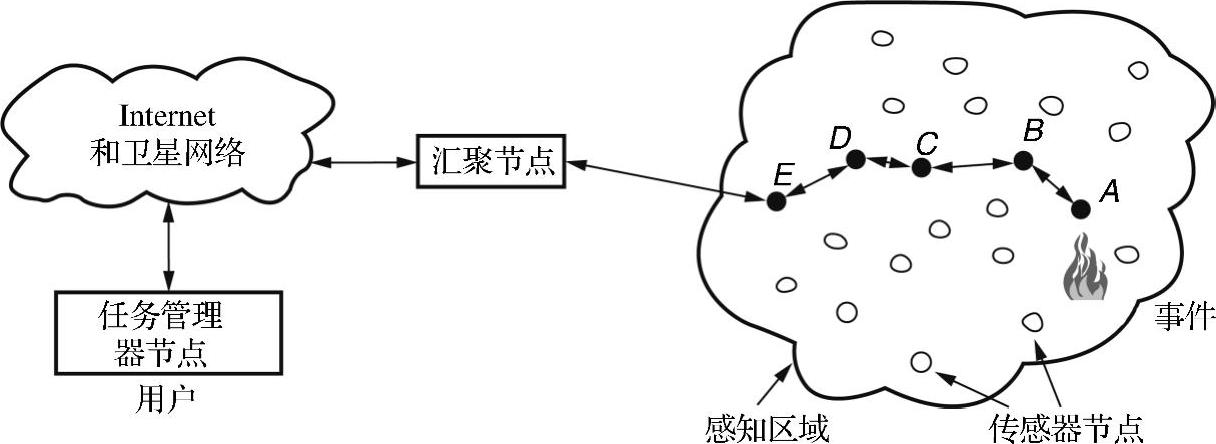
图1-2 事件驱动报告应用场景
图1-2所示为WSN中一种典型的事件驱动报告应用场景。传感器节点部署在感知区域,形成一个无线网络。一旦监测区域有事件(如火灾)发生,且检测湿度超过预定阈值,则附近的传感器节点(即节点A)将会检测到火灾。然后节点A要么开始路由过程(反应式),要么使用路由表中的路由(先应式,如A—B—C—D—E),将事件信息报告给汇聚节点。然后,汇聚节点或者立即采取适当行动,或者将数据存入数据库供将来统计使用。
周期性报告模式与事件驱动报告模式不同。周期性报告模式中采集的数据不需要紧急传送给汇聚节点。同时,事件驱动报告模式中的数据通常来自于目标或事件附近的传感器节点,而周期性报告模式中的数据通常来自于整个感知区域内的传感器节点。
传感器通过应用数据采集和数据融合操作向汇聚节点报告数据。数据采集是指将测量数据转发给汇聚节点时,在通向汇聚节点的链路上,不对数据进行任何改变。这一般可以通过路由任务来实现,即当从发送方节点(传感器)向目标节点(汇聚节点)发送消息时,使用其他传感器来转发该报告消息。但是,由传感器节点收集的数据可能是冗余的、相互关联的和/或与来自于其他传感器的数据是不一致的。这时采用数据融合来合并来自于不同传感器节点的数据,从而消除冗余,最大限度降低传输量。(https://www.xing528.com)
数据采集和数据融合中常用方法是构建生成树,其树根位于汇聚节点处,该生成树将网络中所有传感器节点连接起来。如果某个节点失效,网络拓扑将会进行重组,从而形成一个新的拓扑结构。一般来说,生成树维护是一项高耗能操作。

图1-3 农业应用中的数据汇集或融合
在数据采集或融合中,来自于每个节点的数据沿着生成树转发到汇聚节点。如图1-3所示,图中WSN的部署场景是农业应用。大量传感器节点分布在整个感知区域,用于监测温度、光照强度和土壤湿度。汇聚节点位于室内,它能够向自配置的传感器发出询问信息。在询问过程中,报告树生成,其树根位于汇聚节点处。从感知区域内的所有传感器周期性采集的数据,在不与来自于其他传感器测量数据进行合并的情况下,沿着报告树进行转发。在此过程中,也可以采用数据融合方法,如将来自于感知区域内所有传感器的感知数据进行合并,并通过数据采集操作,沿着报告树以逐跳的方式,将合并后的报告数据传送给树根(汇聚节点)。例如,为了实现不均匀施肥,需要用到同一块地不同区域内的土壤条件信息。有时只需要整块地的一条报告信息(如当前土壤湿度)就足够了。在这种情况下,树中的子节点接收到数据后,传感器节点在将数据发送给构造树中的父节点之前,需要将该数据与自身感知得到的数据进行融合。
从传统的观念看,通常假定大型静态传感器网络只包含一个固定的汇聚节点,但这种观念已经受到理论和仿真分析挑战,因为理论和仿真分析结果表明,这种传感器网络在性能方面具有诸多瓶颈。例如,据报道,如果使用具有相同传输范围的传感器来优化每条报告消息的能耗(不进行数据融合),此时也会在汇聚节点周围产生能量空洞,但其外围接近全能量(Olariu et al.,2006)。同时,数据融合通常是不可能实现的。例如,监测运动状态的传感器无法生成相同的报告,汇聚节点指令也无法进行整合。因此,除非改变网络模型本身,否则问题无法得到解决;传感器网络要么是小型的(如包含上百个节点),要么包含多个汇聚节点、移动汇聚节点、移动传感器等。但是,这反过来会使得网络层协议复杂化。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。