



参考文献(Stojmenovic,2006)提出了一种用于设计传感器网络网络层协议的框架,包括局部路由、广播、区域覆盖等。框架建立在对成本进度比进行优化的基础上。在这种情况下,到达路由中下一跳转发节点的成本用一种特殊的度量方法表达,进度是一种到达目标节点进度的测量标准。
成本度量的实例包括跳数、功率、磁阻、功率×磁阻、延迟和预期跳数(参考文献(Stojmenovic,2006),也可参见第1章)。每条链路都有一个成本计量方法,它与所采用的假定和度量标准有关。框架假定每个节点都知道它与邻近节点链路的成本。该框架的基本思路如下:假设源节点或当前节点S有k个邻居,且仅考虑那些比当前节点更接近目标节点的邻居,以确保每一步的进度。也就是说,S向目标节点转发数据包时有k种选择。然后,节点S针对每个邻居计算Ci/Pi,i=1,2,L,k,其中Ci和Pi分别代表第i个候选邻居的成本和进度。选择具有最小成本进度比的邻居来转发数据包。接收节点连续使用该规则,来选择下一跳转发节点。路由过程不断进行,直至到达目标节点,或者没有进度邻居可用。如果没有符合要求的邻居,则丢弃该数据包,或者在丢弃数据包之前,使用基于特殊成本度量标准的恢复机制来开启一个进程。通过将框架应用到以下著名的地理路由算法中,就可以很好地说明这一点。
在上一节中介绍的贪婪路由(Finn,1987)中,成本度量指标是跳数(路由上的传输次数),转发的进度是到目标节点距离的减少程度。对拥有待传输数据包的当前节点来说,向任意一个邻居传输数据包的成本是相同的(即1跳)。在图4-1所示的实例中,节点B的成本进度比为1/(∣SD∣-∣BD∣)。在贪婪路由算法中,∣SD∣-∣BD∣可达到最小。如果进度指标定义为邻居在线段SD上的映射,则该路由算法就变成了MFR(Takagi and Kleinrock,1984)。
另一个实例是局部功率感知路由。参考文献同(Kuruvila et al.,2004)对该路由算法进行了描述。在图4-4中,节点C到达节点节点A所需的功率与CAα+c成正比,其中α是功率衰减因子,正常取值范围为2和6之间;c是一个常数。常数c代表准确接收信号所需的能量和最小信号强度。功率指标可用来表示成本。进度定义为∣CD∣-∣AD∣(只考虑进度为正数的情况,即∣CD∣>∣AD∣)。这样,功率感知路由的成本进度比为(∣CA∣α+c)/(∣CD∣-∣AD∣)。所选的邻居能够确保在接近目标节点时,每单位进度的功耗最小。
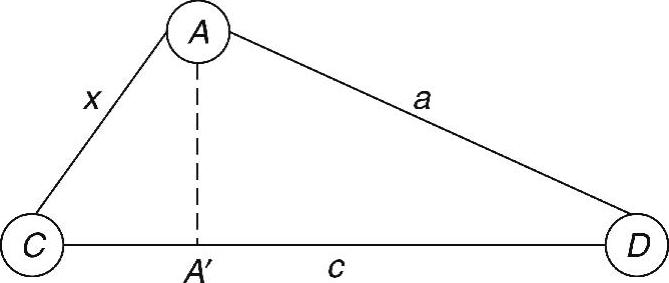
图4-4 当前节点C、候选邻居A和目标节点D
需要注意的是,功率感知路由可能会导致某些节点的早期能量耗尽。如果将节点剩余能量作为磁阻考虑在成本中,则路由的目标是实现网络执行的路由任务数目最大化。例如,假定f(A)表示节点A处的归一化(在区间[0,1]内)剩余能量g(A)的倒数1/g(A)。具有更多剩余能量的节点,即f(A)值较小的节点,更愿意转发数据包,而剩余能量少的节点,即f(A)值较大的节点,不愿意这么做。路由算法选择能够实现f(A)/(∣CD∣-∣AD∣)最小化的邻居A作为转发节点,其中∣CD∣>∣AD∣。该路由框架可应用于其他成本度量标准,如QoS要求、传输延迟、链路质量和数据。(https://www.xing528.com)
通过采用参考文献(Hang et al.,2004)(针对QoS度量成本)和参考文献(Kuruvila et al.,2004)描述的迭代改进方法,可以对所有基于成本进度比的路由协议进行改进。假定当前节点C选择能够实现成本进度比最小化的邻居A作为转发节点,但总体目标是实现该路由上的总成本最小化。如果存在节点C的另一个邻居B,满足成本(CB)+成本(BA)<成本(CA),则通过节点B转发数据包要比节点A更合适。这种改进以迭代的形式不断重复,直至不存在改进的可能。需要注意的是,如果节点C已经得到了给定度量标准信息(它包括两个邻居之间的度量标准),则这种改进能够以本地化方式在节点C处进行,无需交换消息。
迭代改进是通用方案(参考文献(Sanchez and Ruiz,2006),参考文献(Wu and Candan,2007),参考文献(Elhafsi et al.,2008))(采用功耗作为度量标准)的一种特殊情况。该通用方案建立在通往临时目标节点的最短加权路径基础之上。假定当前节点C选择具有最好成本进度比(在参考文献(Sanchez and Ruiz,2006)第一条建议中,临时目标节点由基于跳数的贪婪路由决定)的节点C作为转发节点。节点C不直接向A发送消息,而是构建一条从C到A的最短成本路径(使用与权重一样的成本度量标准),并将数据包转发给路径上的第一个节点B(通常情况下B=A),来实现总成本最小化。然后,节点B采用同样原理,从选择它自己的临时目标节点开始(Elhafsi et al.,2008),或者直接使用目标节点,通过构建最短成本路径,最终到达目标节点(Wu and Candan,2007)。为了避免两个邻近节点之间形成环路,我们仅考虑那些直接与临时目标节点相连的邻居。如果直至到达目标节点时,临时目标节点一直固定不变(Wu and Candan,2007),则不需要对指向最终目标节点的每步进度进行验证。否则,为了避免形成环路,只有那些靠近最终目标的节点(不仅仅是临时节点)才能参与最短路径构建(Elhafsi et al.,2008)。
如果贪婪路由(成本度量给定)无法在给定节点展开进度,则可调用恢复模式。恢复模式(在本章后面将会涉及)采用跳数作为度量标准,以保证恢复正常实现(这种解决方案是在参考文献(Stojmenovic and Datta,2004)中提出的)。但是,沿着这些预定边的总成本无法采用给定的成本度量标准进行优化。在算法(Wu and Candan,2007,Elhafsi et al.,2008)中,不是直接沿着这些边来传输数据,而是在具有最短加权路径的边的端点之间直接进行数据传输。同时,参考文献(Elhafsi et al.,2008)使用给定节点集构建了一个连通支配集,并计算通过计算其Gabriel图,来获取平面图G′。在G′上仅采用面路由来确定哪些边参与恢复过程。在每条边上,采用最短加权路径路由。这样,使用两样的方法可以得到下一条边,直至恢复过程变为可能。这种两相(贪婪-面)路由过程反复迭代,直至到达最终目标。
成本进度比框架的一个主要优点是它不需要诸如阈值的额外参数。在基于阈值的典型方法中,如果没有发现“好”邻居,则“坏”链接被取消,数据包被丢弃。但是,合理的路径中可能仅包含一个很弱的“桥”。目前,已经进行的实验表明,基于阈值的方法对于所有阈值来说性能比较差,原因可能是由于阈值限制条件过多,导致差错率过高,或者是由于阈值限制条件过于宽松,在一条路径中支持一个或多个弱链接,导致选择的路径不是最优,从而为路由生成了一个瓶颈因素。这种现象之所以发生,是由于在“可接受”链路的最终选择上,通常采用的度量标准与成本度量标准不同。例如,可能会选择最靠近目标的节点,但没有针对所选度量标准,考虑该节点几乎无法接受的状态(如延迟)。
负载均衡用于有效使用可用资源,通过平均分配负荷,保持负载节点能耗平衡。该问题用于路由数据包,避免路径拥塞,从而实现网络流量平衡,降低端到端延迟。在网络内部分配负荷有两大好处。首先,通过分配网络负荷可以充分利用网络资源。一种高效负载均衡路由协议能够提高数据包传输速率和网络吞吐量。其次,通过平均分配负荷,可以平衡能耗,延长网络的生命周期。Stojmenovic准备撰写的论文中提出了一种动态无参负载均衡地理路由协议。拥有待传输数据包的节点将数据包发送成本,与所有靠近目标节点、且未达到全负荷状态的可用邻居推进的进度进行对比。选择具有最小成本进度比负载(A)/(∣CD∣-∣AD∣)的邻居作为转发节点。在这个公式中,负载(即所选成本)可以看做是节点A处已消耗带宽与总带宽之比。成本随着消耗带宽的增加线性提高。递增成本可采用负载(A)/容量(A)来定义,容量(A)表示邻近节点A的归一化剩余带宽(容量)(Stojm-enovic准备撰写的论文)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。