



参考文献(Batalin and Sukhatme,2005)提出了一种基于单执行器配置方法LRV(Least Recently Visited,最近最少访问),它假定感知和通信半径相等,且根据先前部署传感器的建议,来引导执行器运动。在起始阶段,执行器(机器人)在其当前位置部署了一个节点。每次部署的传感器维护一个方向集,沿着该方向,机器人可以从当前位置移开。方向遵循某个图结构(如树)或可以进行预定义(如4个地理方向)。它也可以为每个方向分配一个权重,初始值为0,表示执行器遍历该方向的次数。
当执行器位于其传感器的通信范围内时,每一个传感器通过向执行器发送消息,来推荐其局部LRV方向。方向可以预定,为了防止形成环路,推荐单一方向比较合适。执行器在推荐者方向上运动预定距离。但是,如果所选方向是阻塞的,则它将通知推荐者,并申请一个新建议方向。每当执行器离开或到达时,其当前传感器将提高其离开方向(或到达方向)的权重。这可以通过传感器向执行器发送通知消息来实现。当执行器开始下次运动之前,在预定义短期内,它仍然位于某个位置。在此期间,如果它没有接收到传感器消息,则它将在环境中撒布一个新传感器。
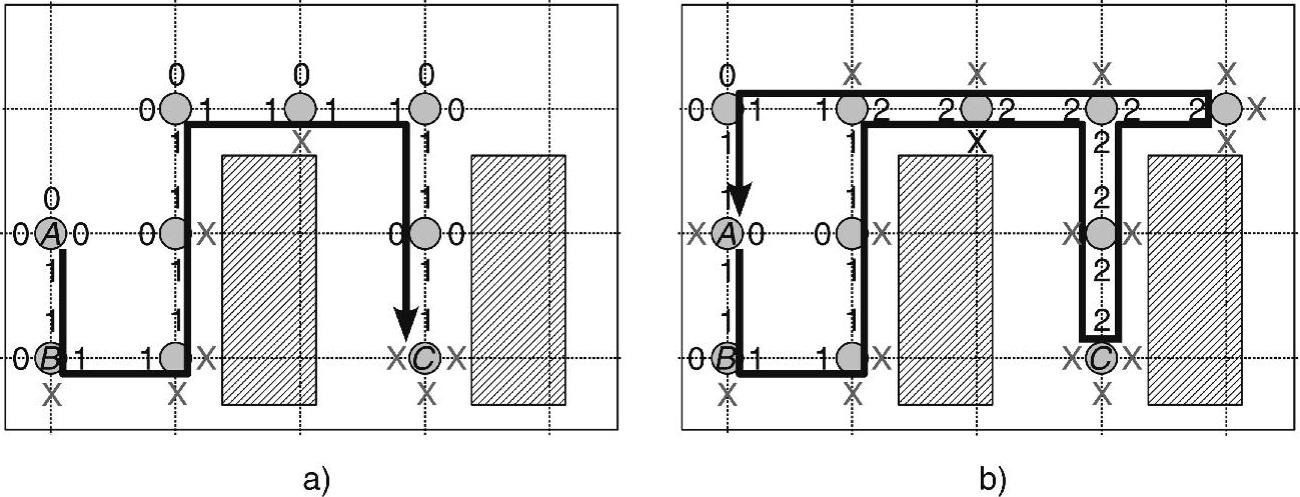
图10-2对LRV方法进行了说明。机器人首先从位置A出发,沿着4个地理方向运动,这4个地理方向的排序是南、东、北、西。未来,粗箭头代表机器人轨迹,节点周围的数字表示4个方向上的局部权重。交叉用于标记局部已知(来自于机器人的消息)的阻塞方向。机器人在位置A撒布一个传感器,然后传感器建议它向南运动。根据该建议,机器人运动到位置B,在那里撒布一个新传感器,并将其作为当前传感器。当前传感器首先为机器人推荐向南的方向(机器人发现该方向处于阻塞状态),然后推荐向东的方向。机器人按照这种方式前进,到达位置C,如图10-2a所示。然后,它必须向其进入方向(北)运动,因为所有其他方向是阻塞的。它根据先前部署传感器的推荐不停地移动,并在适当位置撒布传感器,最后返回到起点A,如图10-2b所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图10-2 最近最少访问方法
a)快照1 b)快照2
LRV是一种纯局部算法,因而消息传输效率高,容错性好。虽然作者们证明,LRV在有限图上的搜索时间是有限的,但是算法在何种条件下终止不太清楚。因为机器人没有覆盖的全局视图,且经常接收来自于当前传感器的推荐者方向,它无法停止运动,直至没有现成的传感器可用。但是,详尽的运动支持机器人访问和修复(通过撒布新传感器)由运行节点失效导致的新近感知洞穴(由于远离空穴的区域中推荐的随机特性,因而发现这种搜索的路径效率比较低)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。