



【摘要】:参考文献提出了一种蛇形传感器部署方法,即SLD。SLD采用单个移动执行器,在有界直线ROI上构建的等边三角网格顶点上部署静态传感器。它没有交代清楚算法如何终止,即在何种条件下机器人停止运动。在参考文献使用的实例中,甚至存在着无法解释的执行器行为。在这种情况下,一旦机器人进入墙的一侧,它将无法进入到ROI的另一侧。图10-3 SLD的不完全覆盖
参考文献(Chang et al.2007)提出了一种蛇形传感器部署方法,即SLD(Snake-like Deployment,蛇形部署)。SLD采用单个移动执行器,在有界直线ROI上构建的等边三角网格(Triangle Tessellation,TT)顶点上部署静态传感器。单个执行器从ROI的左上角出发,像蛇一样移动。它沿着水平线移动到右边,并在3rs分界线处撒布传感器,直至它到达ROI的边界或遇到障碍物。然后,它沿着指向下一个水平线的方向运动 ,将其运动方向变为向左,采用类似方法前进。
,将其运动方向变为向左,采用类似方法前进。
该算法还试图通过支持执行器打破正常的运动模式,来避开隐藏在物理障碍物后的感知空穴。具体说来,在进行下一步移动之前,执行器在其到来的方向,检查附近是否存在任何感知空穴。如果答案是肯定的,则它将改变指向该洞穴的运动方向。采用这种方法,执行器可以沿着不同路线,上、下、左、右自由移动,降低了感知空穴出现的概率。它还支持执行器不仅可以从ROI的各角出发,还可以从ROI的中间出发。
但是,这种算法仍然是不完美的。它没有交代清楚算法如何终止,即在何种条件下机器人停止运动。在参考文献(Chang et al.,2007)使用的实例中,甚至存在着无法解释的执行器行为。与作者们宣称的不同,根据它们当前的算法描述,其实该算法无法保证全覆盖。一个简单的反例场景是一端位于区域边缘的一堵墙部分切割ROI,如图10-3所示。在这种情况下,一旦机器人进入墙的一侧,它将无法进入到ROI的另一侧。(https://www.xing528.com)
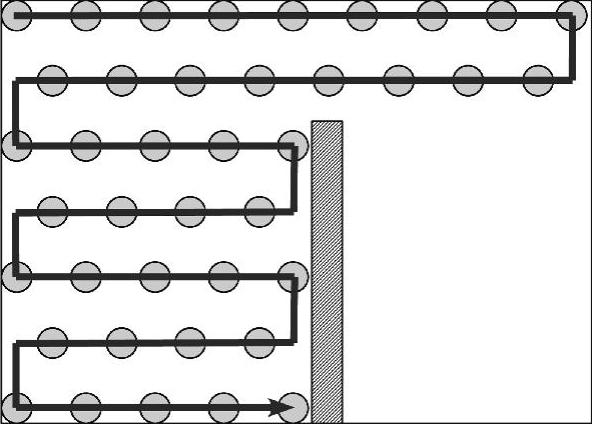
图10-3 SLD的不完全覆盖
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。