



PID控制器的优化整定是一种基于被控对象和经验的参数确定方法,生产过程中要求系统能够根据被测参数、环境及原材料的变化而自动对控制器进行调节,使系统随时处于最佳状态。即要求PID控制器具有在线修正参数的功能,特别当系统的非线性特性较强时,传统的基于线性化模型的PID设计方法难以获得良好的控制效果。为此,应采用PID控制器参数优化整定。利用Simulink的NCD Outport模块(MATLAB 6.5)或Signal Constraint模块(MATLAB 7.5)可以对PID控制器参数进行优化整定。
采用Simulink Response Optimization中的Signal Constraint模块对PID控制器参数优化Simulink仿真结构图如图3-52所示。
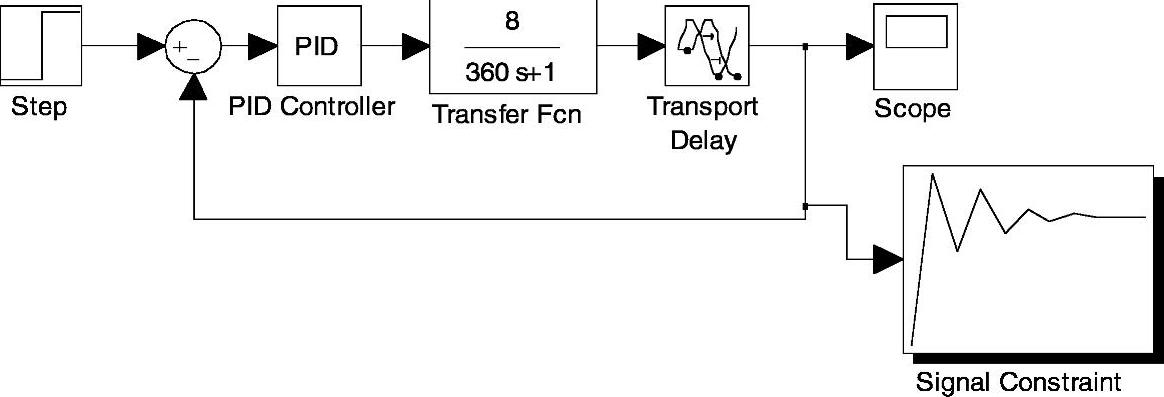
图3-52 PID控制器参数优化Simulink仿真结构图
采用常规模型PID参数整定PID控制器参数为KP=0.29、TI=375、TD=93,系统的输出响应为不稳定的,如图3-53a所示,即使人为多次再进行调节KP=0.2、TI=1000、TD=10,系统的输出响应如图3-53b所示,此时系统虽然稳定,但滞后时间比较长也很难满足系统的要求,并且费时费力。
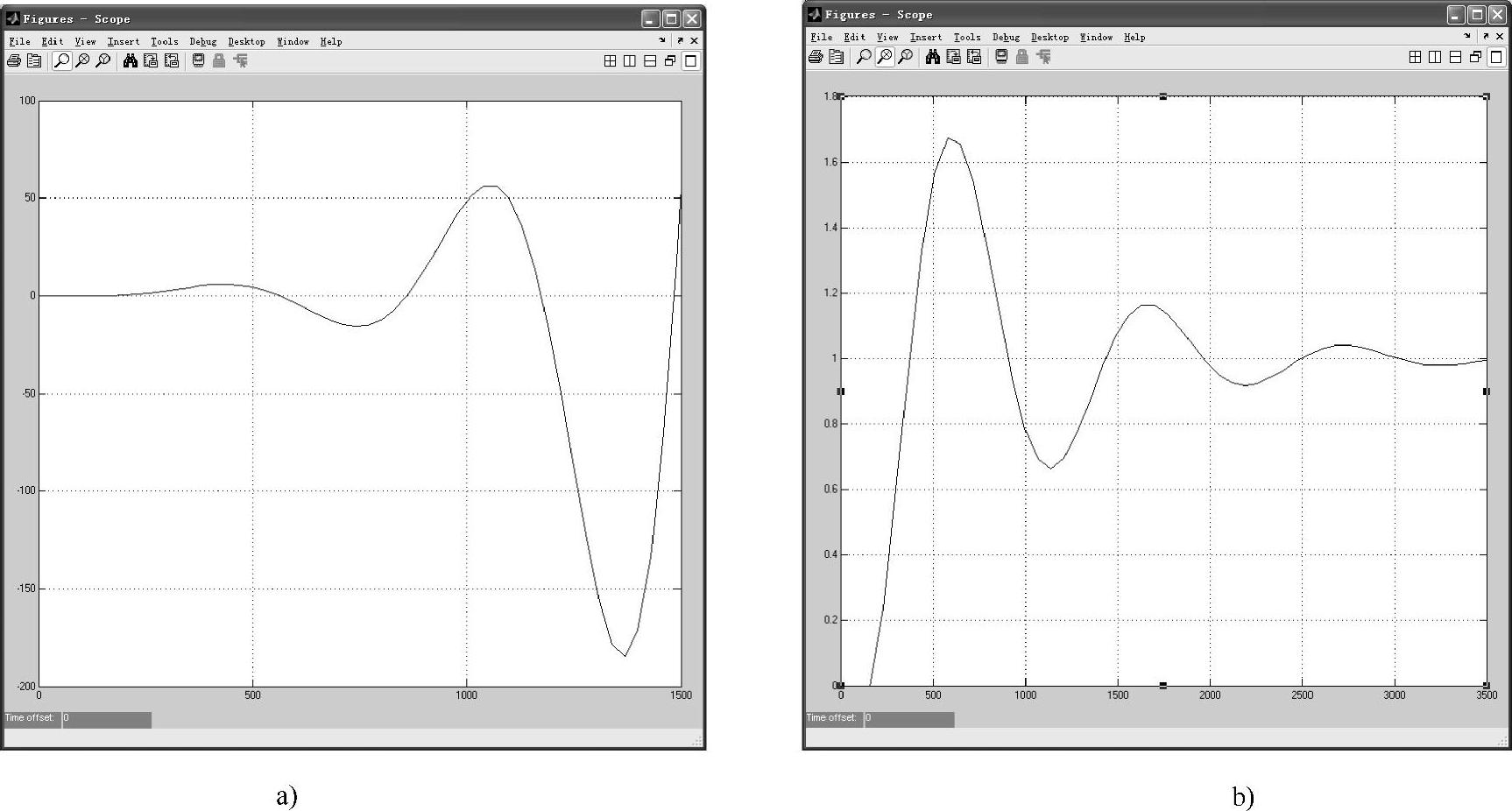
图3-53 系统输出响应
根据系统时域性能指标如调节时间(Setting Time)、上升时间(Rise Time)、超调量(Percent Overshoot)等要求,在系统模型窗口双击Signal Constraint模块,即打开时域性能指标约束窗口,如图3-54所示。
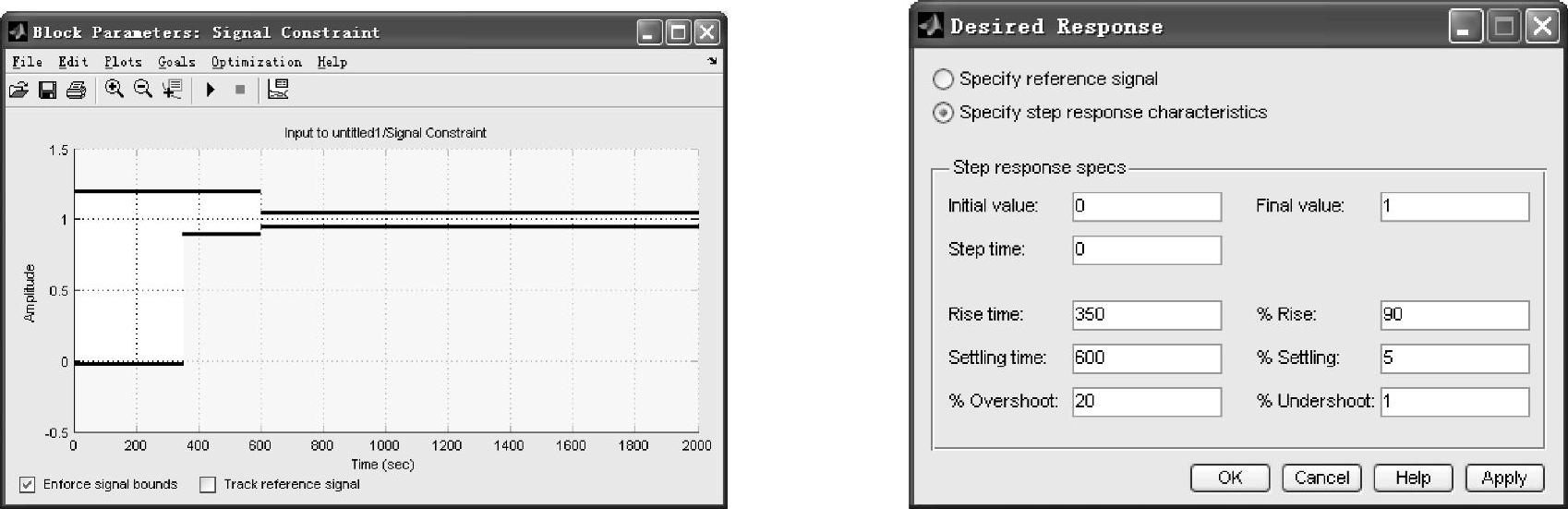
图3-54 PID控制器的优化参数设置(https://www.xing528.com)
打开Optimization中的Tuned Parameters设置优化参数,将PID控制器的参数Kc、Td、Ti作为优化参数,点击“Add…”按钮,把Kc、Td、Ti添加到参数窗口,最后点击“OK”按钮,如图3-55所示。
在Signal Constraint模块点击运行按钮,开始优化过程,优化计算时系统的响应曲线在时域约束窗口如图3-56a所示。响应曲线逐渐接近系统指标要求,最后给出PID参数的优化值如图3-56b所示。

图3-55 参数优化设置
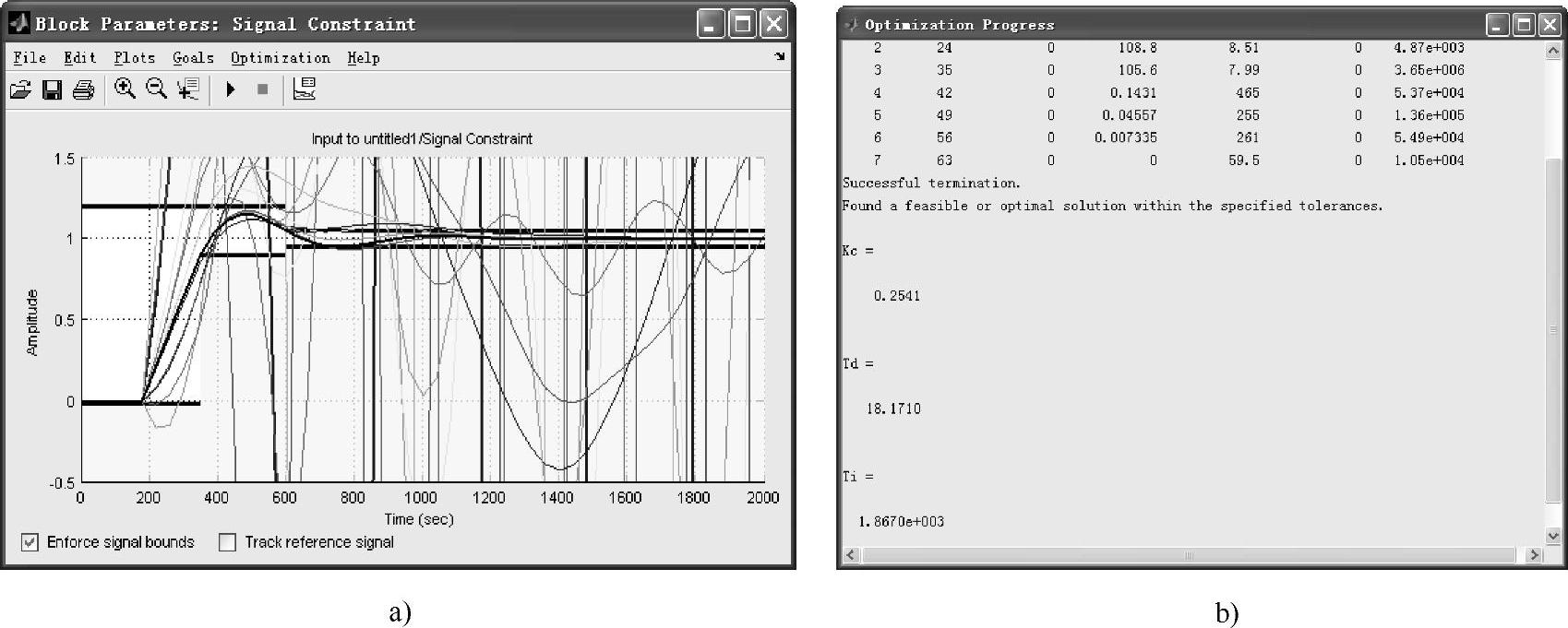
图3-56 参数优化过程
优化结束后,在模型窗口启动仿真,得到系统的阶跃响应曲线如图3-57所示。
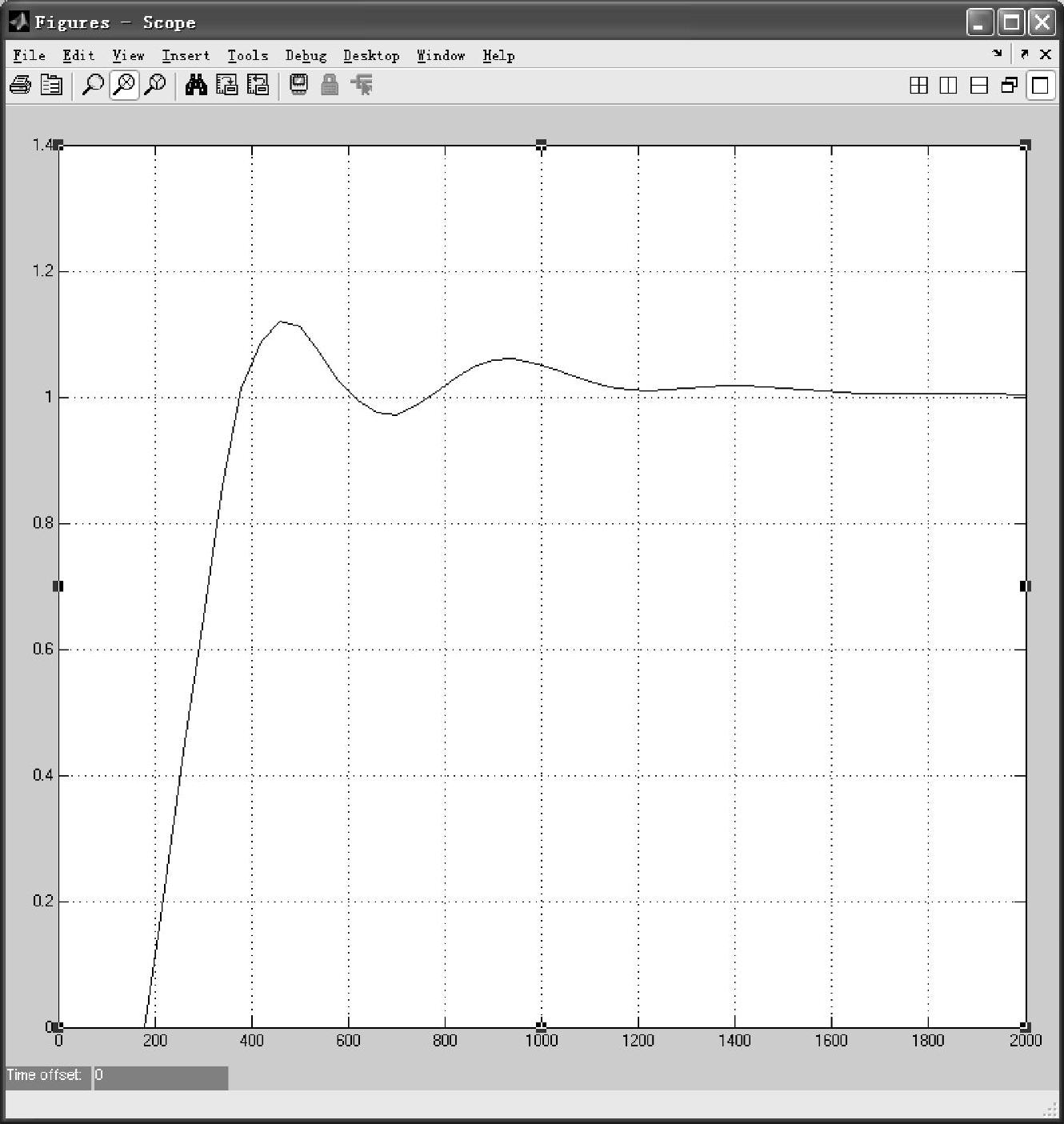
图3-57 优化参数下系统的输出响应
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。