



对图6-63所示的蒸气减压双重控制系统,原理框图如图6-64所示,其等效框图如图6-65所示。
图中,G01(s)是响应快的广义对象传递函数,假设G01(s)=5/(s+1)(3s+1);G02(s)是响应慢的广义对象传递函数,假设G02(s)=5/(s+1)(3s+1)(60s+1)(120s+1);Gc1(s)是主控制器的传递函数,为消除余差,且加速对象的响应,选择为PID控制器。若按常规PID参数整定有KP=0.89、TI=1.5、TD=0.375,对应的阶跃响应曲线如图6-66a所示。将比例值适当增大些,积分作用快些,最优参数整定为KP=1.3、TI=2、TD=0.3,对应的阶跃响应曲线如图6-66b所示,系统的超调量小于21%,调节时间小于5s。
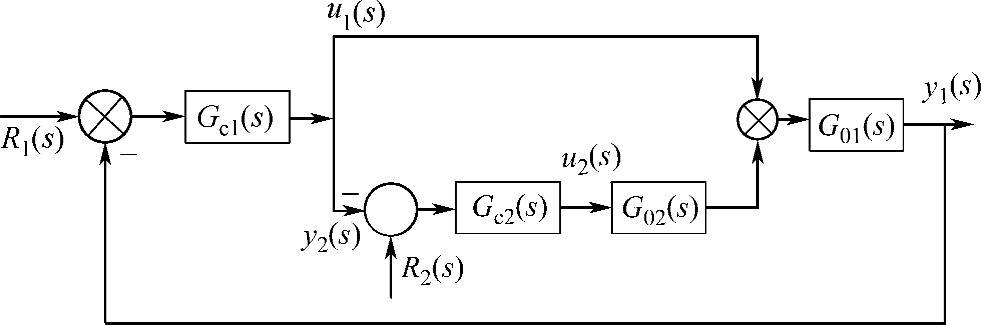
图6-65 双重控制系统的等效框图
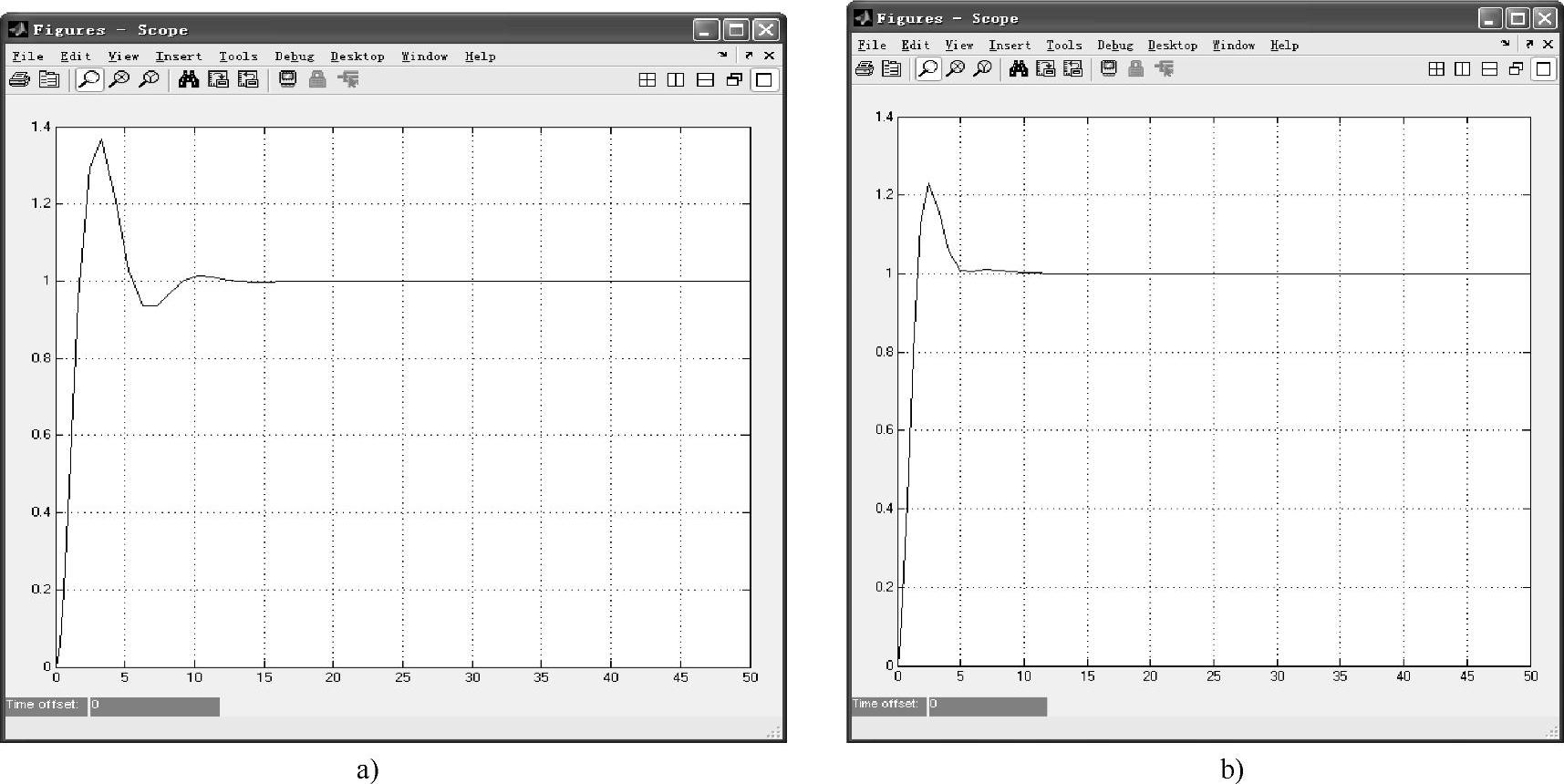
图6-66 主控制回路的阶跃响应
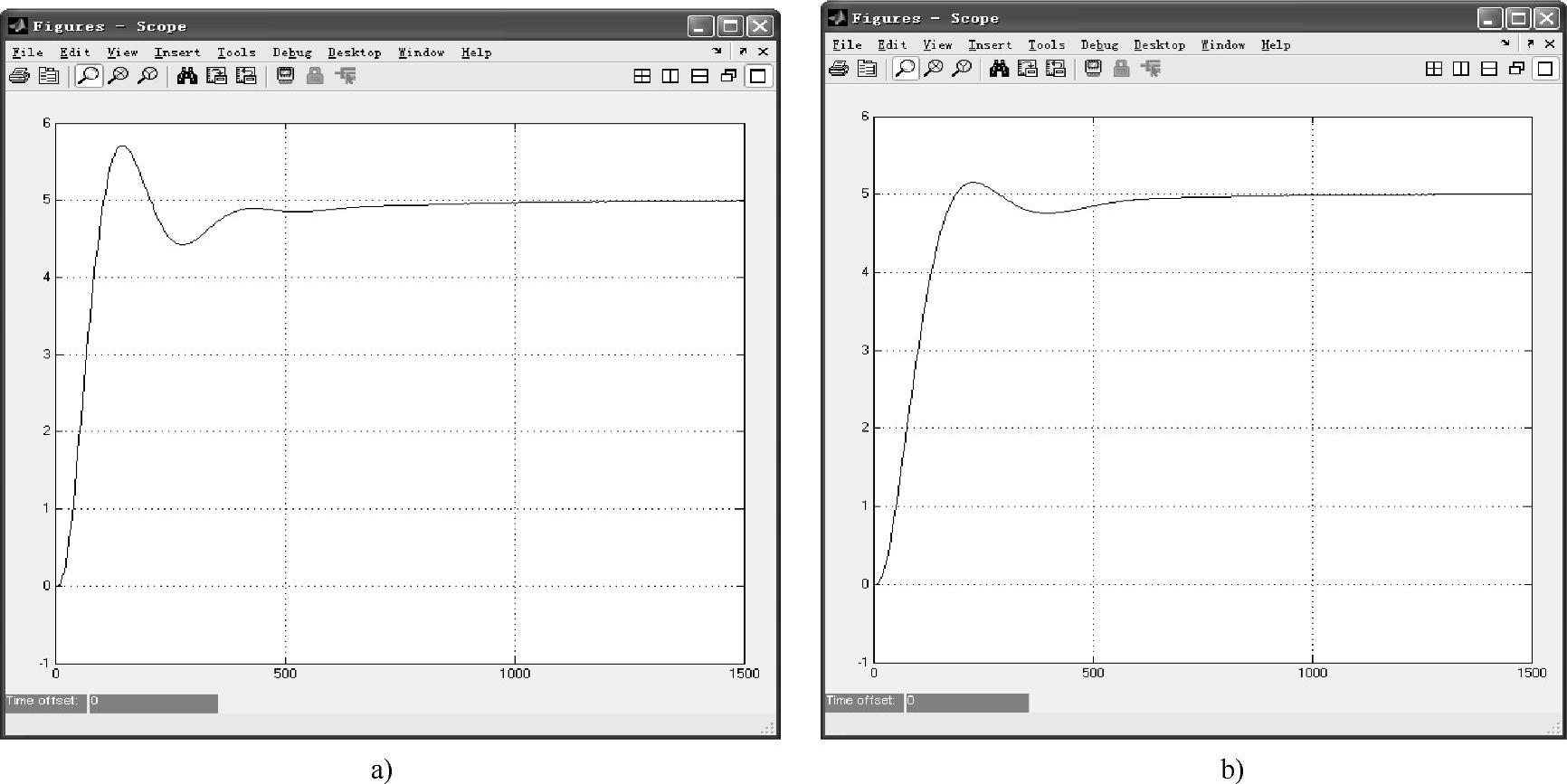
图6-67 副控制回路的阶跃响应
Gc2(s)是副控制器的传递函数,副控制器对系统起缓慢调节作用,选择为PI控制器,常规PI控制器参数为KP=0.8、TI=375,对应阶跃响应曲线如图6-67a所示。比例值小些,积分作用慢些,最优参数整定为KP=0.4、TI=500,对应的阶跃响应曲线如图6-67b所示,系统的超调量小于5%,调节时间大约为500s。
双重控制系统的Simulink仿真框图如图6-68所示。
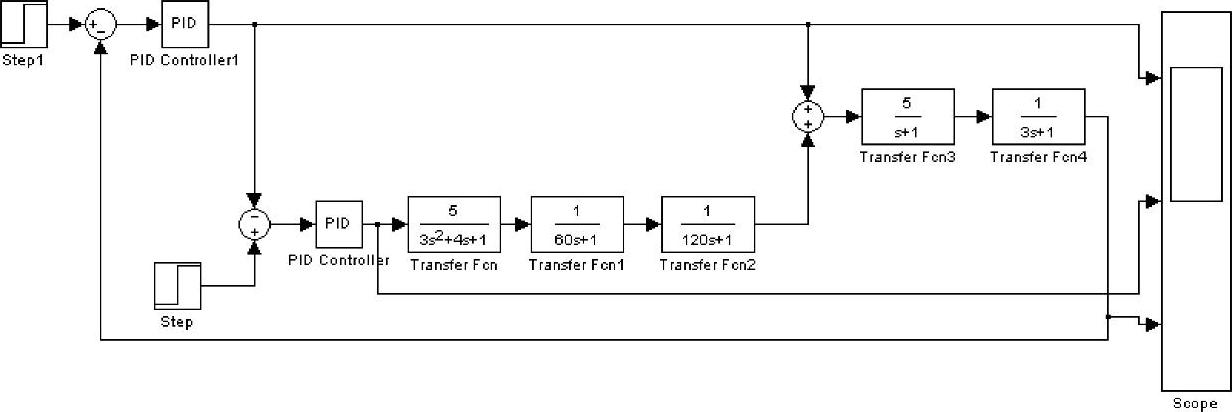
图6-68 双重控制系统的Simulink仿真框图
系统在设定值为1200时,系统的响应曲线如图6-69所示,依次为主控制器输出、副控制器输出和系统输出。
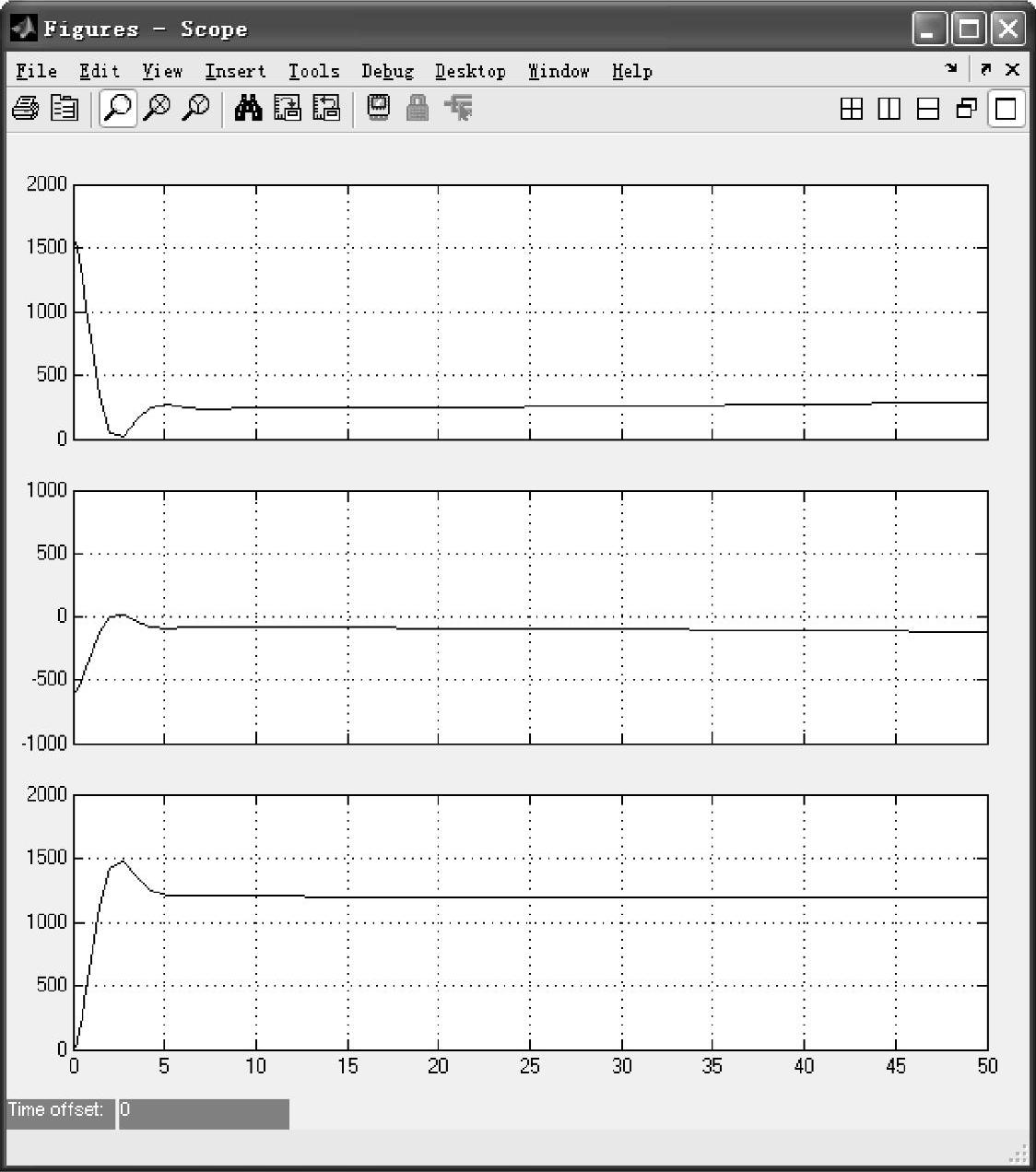
图6-69 系统的响应曲线
若在系统的主被控对象端施加100%的干扰信号,系统的仿真框图及响应曲线如图6-70所示,依次为主控制器输出、副控制器输出、系统输出和扰动信号。
从图6-69和图6-70可以看到,双重控制系统既能迅速消除偏差,又能得到较好的静态特性。并且在干扰出现时,主控制器迅速消除偏差,副控制器使输出又恢复到原来的设定值。
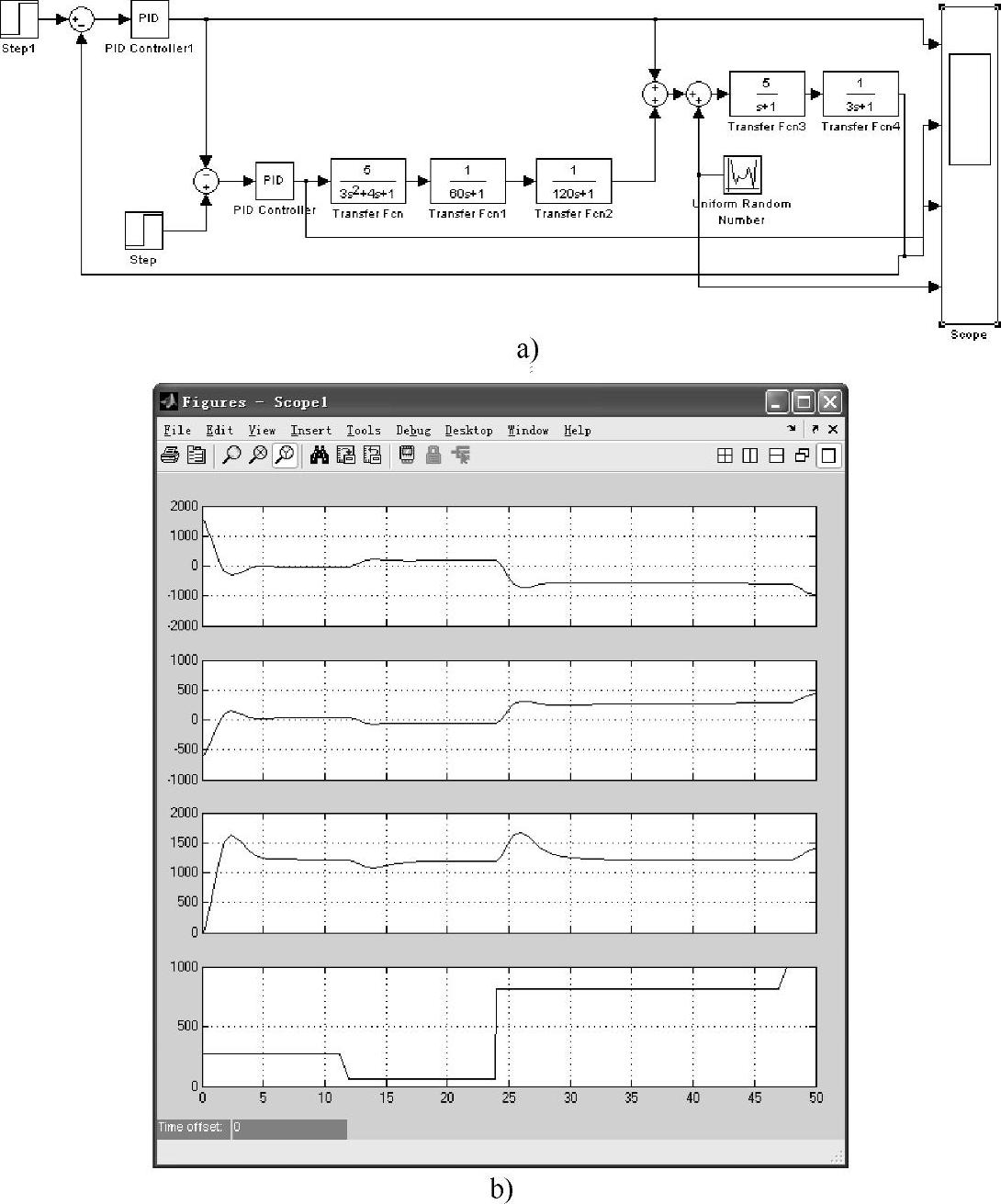
图6-70 干扰作用下系统的响应曲线(https://www.xing528.com)
a)仿真框图 b)干扰作用下响应曲线
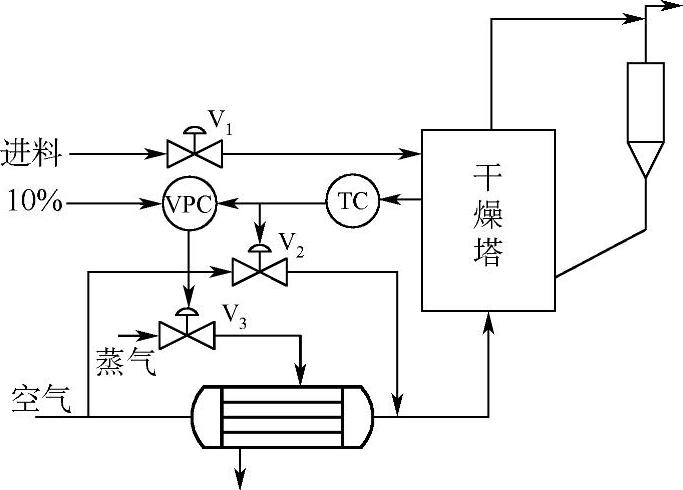
图6-71 喷雾干燥过程的双重控制系统
在食品加工、化工等行业常采用喷雾干燥的方法干燥产品,喷雾干燥过程如图6-71所示。浆料从喷头喷淋下来,与热风接触换热,进料被干燥并从干燥塔底部排出,干燥的程度由出口温度来控制。为了获得高精度的温度控制同时又尽可能地节省蒸气的消耗,喷雾干燥过程采用双重控制。
V1是进料量控制阀,它受前工序来料的影响,一般是不能控制的;V2是旁路冷风量控制阀,它具有快速响应特性,但经济性较差;V3是蒸气流量控制阀,它具有工艺合理的优点,但动态特性变化缓慢。综合各自的优点及缺点,选择旁路风量和蒸气流量两个操纵变量,构成双重控制系统。当干燥塔温度偏离要求值较大时,先采用改变旁路风量,使温度快速回到设定值,同时作为VPC的测量信号,逐渐改变蒸气流量,以保证系统的稳态性能。
假设旁路风量的广义对象传递函数为G01(s)=3e-3s/(6s+1)(3s+1),蒸气流量的广义对象传递函数为G02(s)=5e-15s/(60s+1)2(120s+1)。作为主控制的风量控制器,为消除余差,且加速对象的响应,选择为PID控制器。为达到快速响应目的,比例值可适当大些,积分作用快些,最优参数整定为KP=0.88、TI=18、TD=2.12,对应的阶跃响应曲线如图6-72所示,系统的超调量小于20%,调节时间小于35s。
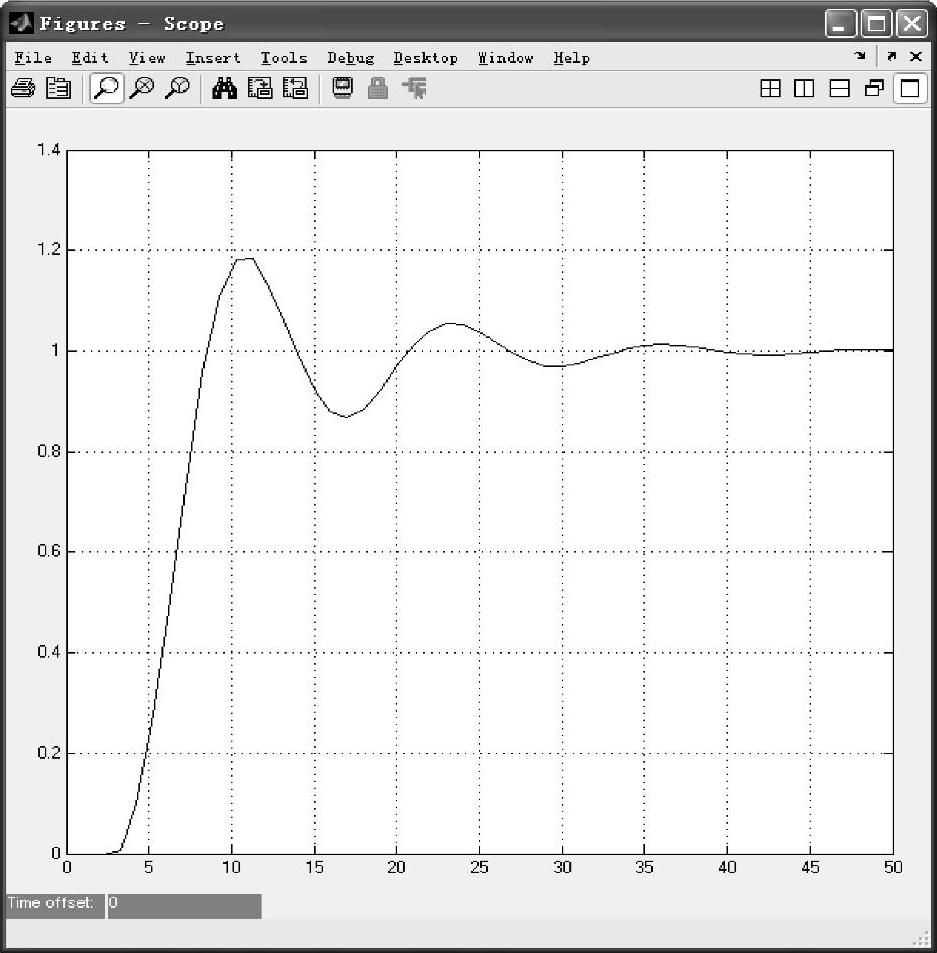
图6-72 风量控制回路的阶跃响应
蒸气流量控制器作为副控制器,为消除稳态误差,采用PI控制。为使副控制器对系统起缓慢调节作用,则比例值小些,积分作用慢些,最优参数整定为KP=0.28、TI=900,系统的阶跃响应曲线如图6-73所示,系统的超调量小于10%,调节时间小于780s。
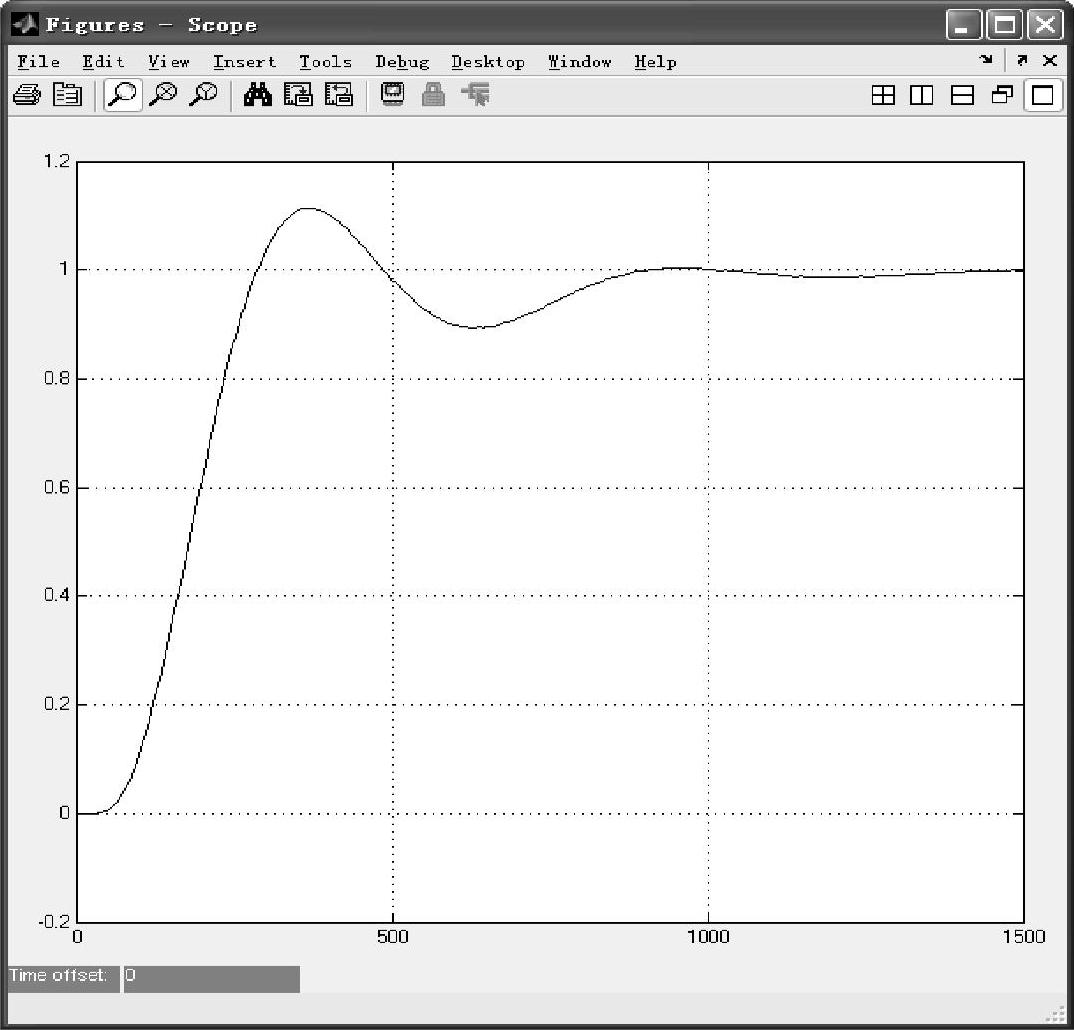
图6-73 蒸气流量控制回路的阶跃响应
双重控制系统的Simulink仿真框图如图6-74所示。
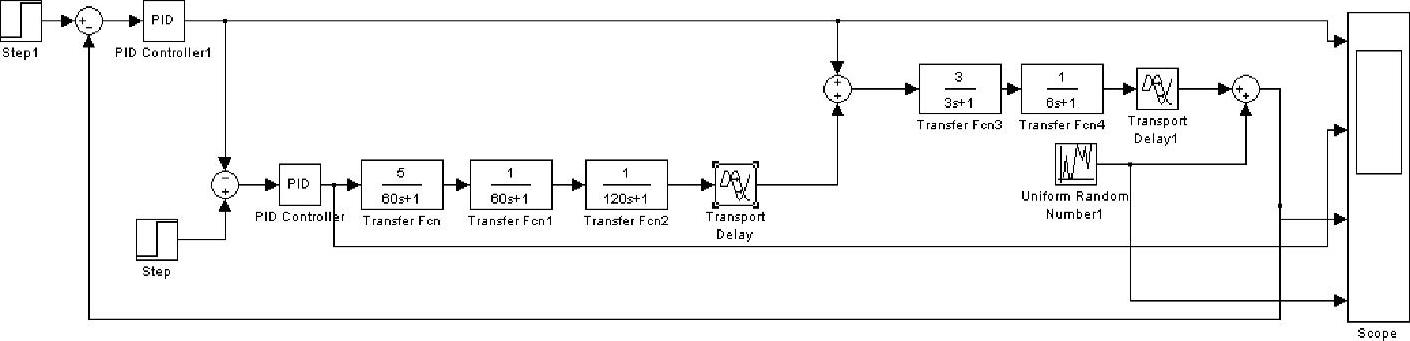
图6-74 双重控制系统的Simulink仿真框图
系统在设定值为1,并在输出端施加50%的随机干扰信号时,响应曲线如图6-75所示,依次为主控制器输出、副控制器输出、系统输出和随机扰动信号。
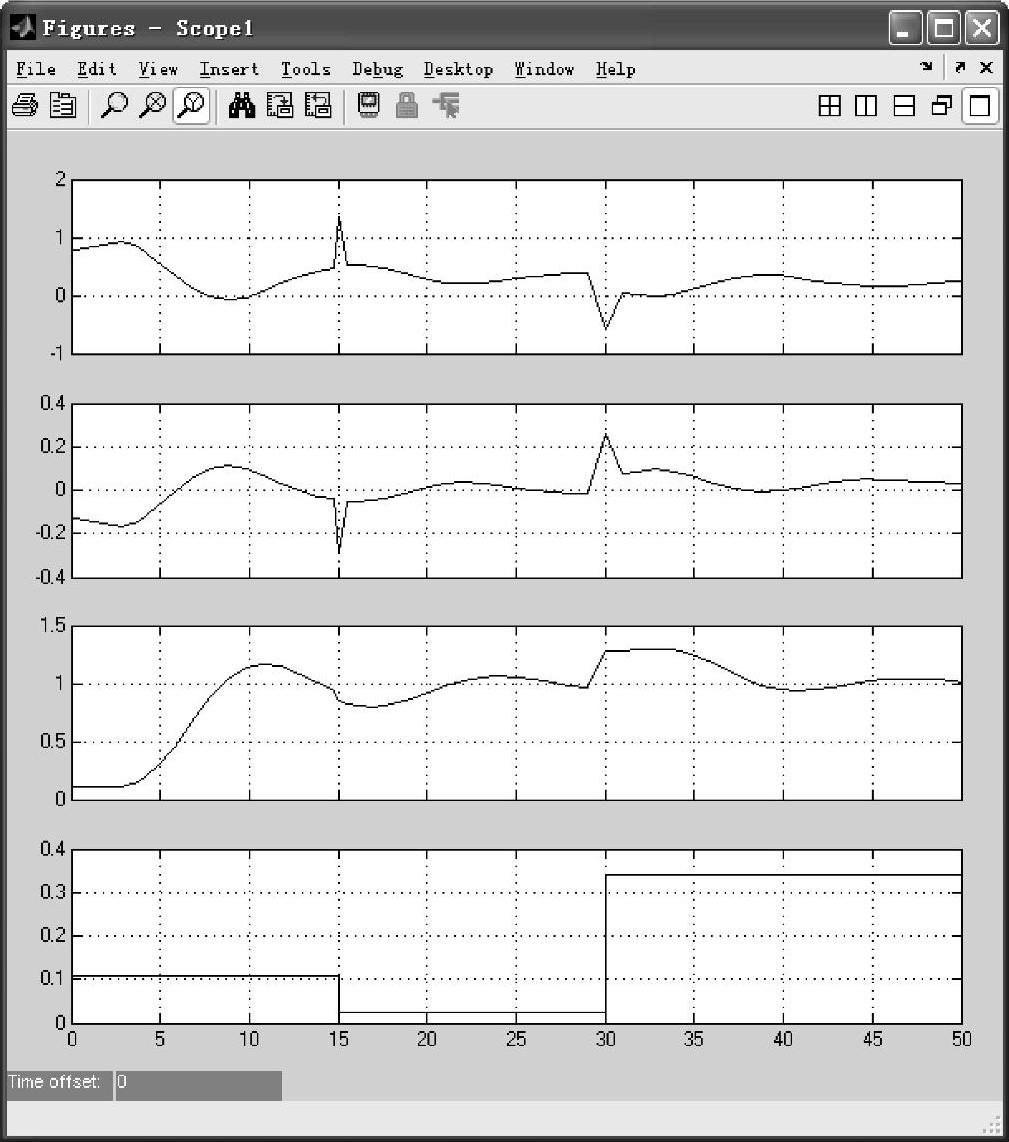
图6-75 双重控制系统的响应曲线
在双重控制系统中,先用主控制器的调节作用,将主被控变量尽快恢复到设定值,保证系统有良好的动态特性。在偏差减小的同时,又充分发挥副控制器的作用,从根本上消除偏差,使副被控变量恢复到给定值,使系统具有较好的静态性能。双重控制较好地解决了动静态矛盾,达到了操作优化的目标。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。