



1.实验要求
图3-39中的小车开始时停在左边,左限位开关SQ1的常开触点闭合。要求按下列顺序控制小车:
1)按下右行起动按钮SB2,小车右行。
2)小车走到右限位开关SQ2处停止运动,延时8s后开始左行。
3)小车回到左限位开关SQ1处时停止运动。
2.程序设计
用“新建项目”向导生成一个名为“小车控制2”的项目(见随书光盘中的同名例程),CPU可以采用任意的型号。在异步电动机正反转控制电路的基础上设计的满足上述要求的梯形图如图3-40所示。在控制右行的Q4.0的线圈回路中串联了I0.4的常闭触点,小车走到右限位开关SQ2处时,I0.4的常闭触点断开,使Q4.0的线圈断电,小车停止右行。同时I0.4的常开触点闭合,T6的线圈通电,开始定时。8s后定时时间到,T6的常开触点闭合,使Q4.1的线圈通电并自保持,小车开始左行。离开限位开关SQ2后,I0.4的常开触点断开,T6因为线圈断电,其常开触点断开。小车运行到左边的起始点时,左限位开关SQ1动作,I0.3的常闭触点断开,使Q4.1的线圈断电,小车停止运动。
在梯形图中,保留了左行起动按钮I0.1和停止按钮I0.2的触点,使系统有手动操作的功能。在手动时,起保停电路中的左限位开关I0.3和右限位开关I0.4的常闭触点可以防止小车的运动超限。
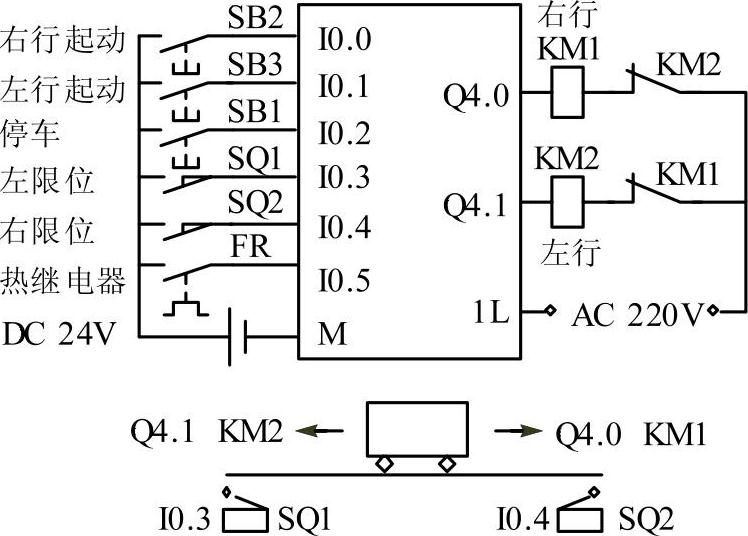
图3-39 PLC外部接线图
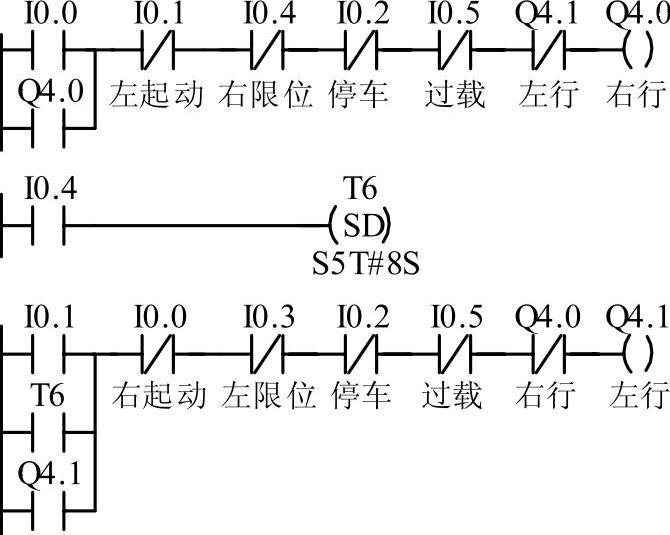
图3-40 梯形图
3.仿真实验过程
1)将OB1和系统数据下载到仿真PLC,将仿真PLC切换到RUN-P模式。(https://www.xing528.com)
2)生成IB0、QB4和T6对应的视图对象(见图3-41)。
3)两次单击PLCSIM中I0.0对应的小方框,方框中的“√”出现后又消失,以此来模拟按下和放开起动按钮。观察控制右行的Q4.0是否为1状态。
4)单击I0.4对应的小方框,方框中出现“√”,模拟右限位开关动作,观察Q4.0是否变为0状态,小车停止右行;以及接通延时定时器T6是否开始定时。
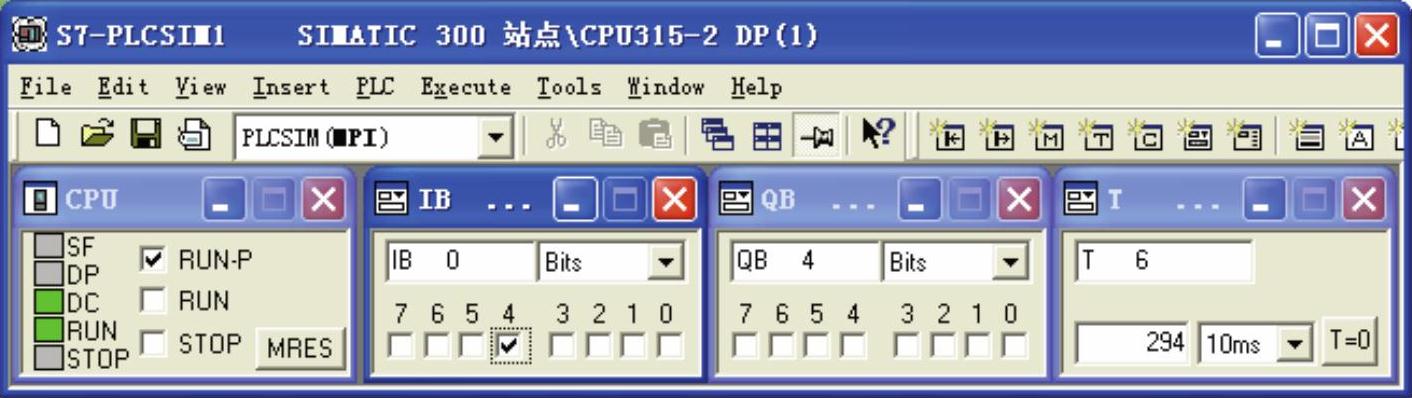
图3-41 PLCSIM
5)T6的定时时间到时,观察Q4.1是否变为1状态,小车左行。
6)小车左行后离开右限位开关I0.4,应及时将I0.4置为0状态。
7)令左限位开关I0.3为1状态,模拟小车返回起点处,观察Q4.1的线圈是否断电,小车停止左行。
4.较复杂的自动往返小车控制仿真练习
PLC的外部接线图与图3-39相同,小车用起动按钮起动后,碰到右限位开关I0.4停止右行,延时5s后自动左行;碰到左限位开关I0.3停止左行,延时7s后自动右行。按下停止按钮后,小车停止运动。
将程序和系统数据下载到仿真PLC,将仿真PLC切换到RUN-P模式。直接使用PLCSIM的视图对象或程序状态监控功能调试程序,调试的方法和步骤由读者确定。
注意调试时左、右限位开关接通的时间应大于对应的定时器定时的时间。小车离开某一限位开关后,应将该限位开关对应的输入点置为0状态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。