



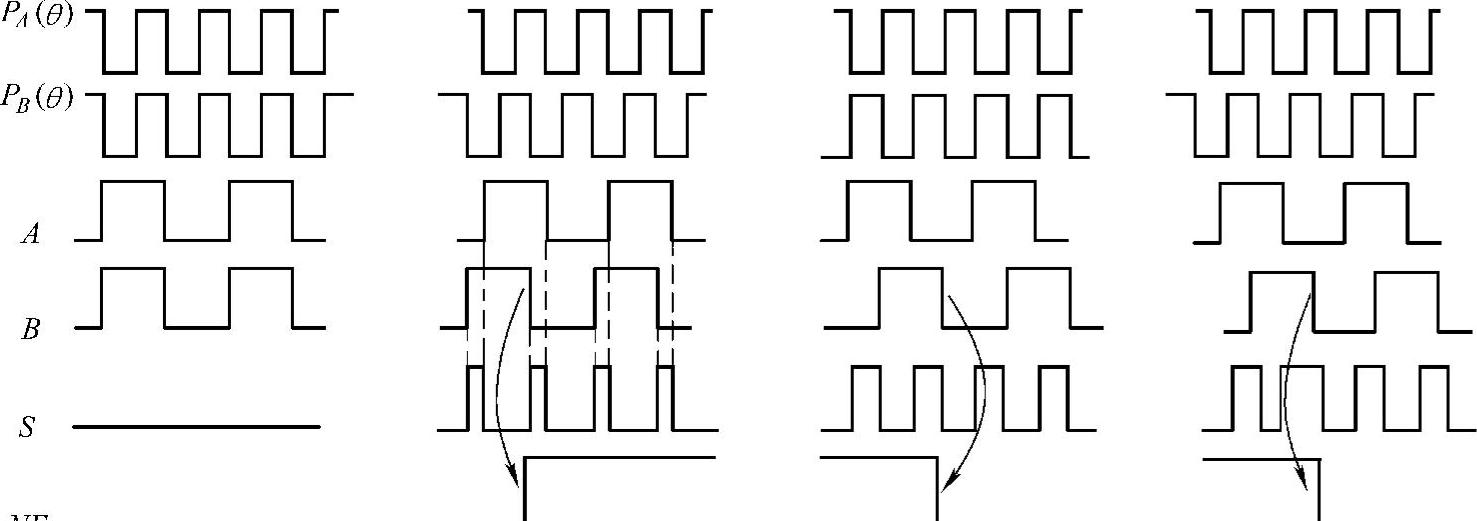
图5-40 鉴相器输入、输出工作波形图

a)Δθ=0 b)Δθ=+90° c)Δθ=+180° d)Δθ=+270°
幅值比较伺服系统是以位置检测信号的幅值大小来反映机械位移的数值,并以此作为位置反馈信号与指令信号进行比较构成的闭环控制系统(以下简称幅值伺服系统)。该系统的特点之一是,所用的位置检测元件应工作在幅值工作方式。感应同步器和旋转变压器都可以用于幅值伺服系统,本节采用旋转变压器作为所讨论系统的示例。幅值伺服系统实现闭环控制的过程与相位伺服系统有许多相似之处,本节着重讨论幅值工作方式的位置检测信息如何取得,即怎样构成鉴幅器,以及如何把所取得幅值信号变换成可以与指令脉冲相比较的数字信号,从而获得位置偏差信号构成闭环控制系统。
1.幅值伺服系统组成原理
图5-41所示的幅值比较伺服系统原理框图中,旋转变压器取幅值工作方式反馈位置信息。如图5-42所示的形式。当采用幅值工作方式时,在其定子上两个相互垂直的绕组应分别输入频率相同、幅值成正交关系的正余弦信号,即

式中 φ——已知的电气角,系统中可通过改变φ角的大小控制定子激磁信号的
幅值;
ω——正弦交变激磁信号的角频率(rad/s),ω=2πf。
在图5-42所示的旋转变压器示意图中,设转子绕组轴线与垂直方向的夹角为θ,并以此作为转子相对于定子的位移角。按照电磁感应原理,在定子激磁信号加入后,转子绕组产生的感应电动势E0为
E0=-n(Uscosθ-Ucsinθ)
=-nUm(sinφcosθ-cosφsinθ)sinωt
=-nUmsin(θ-φ)sinωt=E0msinωt (5-23)
式中 n——旋转变压器定子、转子间的变化。
若将已知电气角φ看做转子位移角的测量值,只要φ与θ不相等,则转子电动势幅值E0m=nUmsin(θ-φ)≠0,即,如果想知道转子位移角的实际大小,可以通过改变激磁信号中φ角的设定值,然后检测E0m=0的大小来换算。只要测出E0m=0,就可以知道,此时E0m=nUmsin(θ-φ)=0,即sin(θ-φ)=0,θ=φ。亦即,可以通过被动测量的方法,准确地获得转子位移角的实测值。
在幅值系统中,若要获得激磁信号的φ值与转子位移角θ的相对关系,则只需检测转子电动势的幅值,这就是鉴幅器的任务。为了完成闭环控制,该电动势幅值需经电压—频率变换电路才能变成相应的数字脉冲,一方面与指令脉冲作比较以获位置偏差信号,另一方面修改激磁信号中φ值的设定输入。下面举例说明幅值比较的闭环控制过程。
首先,假设整个系统处于平衡状态,即工作台静止不动,指令脉冲F=0,有φ=θ,经鉴幅器检测转子电动势幅值为零,由电压—频率变换电路所得的反馈脉冲Pf亦为零。因此,比较环节对F和Pf比较的结果,所输出的位置偏差e=F-Pf=0,后续的伺服电动机调速装置的速度给定为零,工作台继续处于静止位置。(https://www.xing528.com)
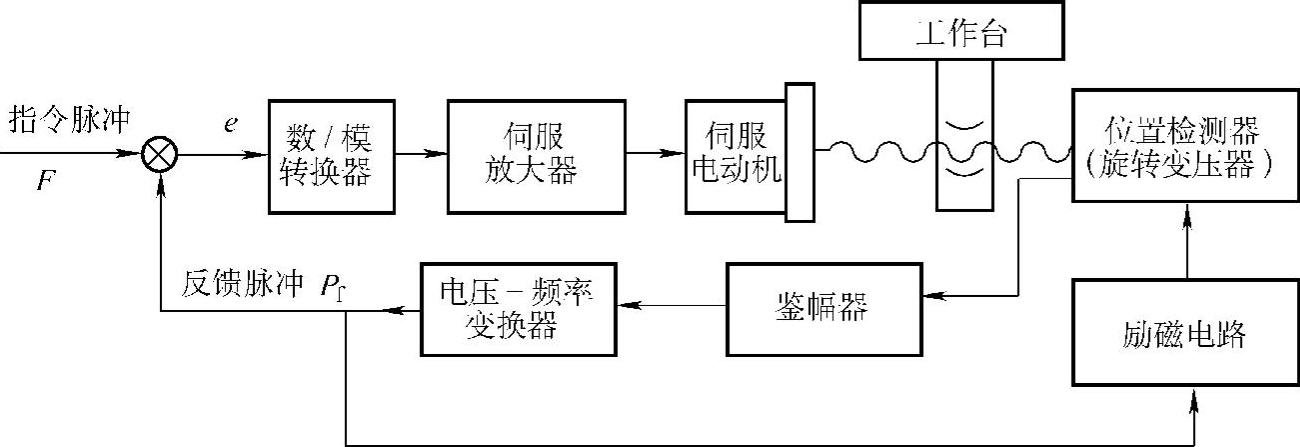
图5-41 幅值比较伺服系统原理框图
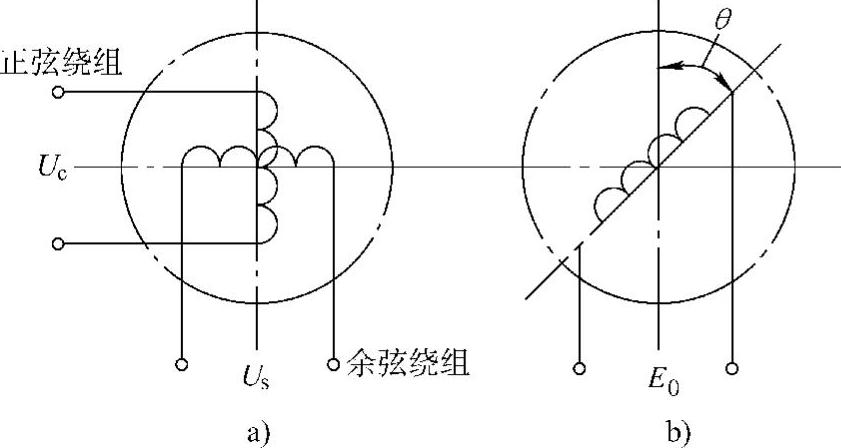
图5-42 幅值工作的旋转变压器
a)定子 b)转子
然后,若设插补器送入正的指令脉冲,F>0。在伺服电动机尚未转动前,φ和θ均没有变化仍保持相等,所以反馈脉冲Pf亦为零。因此,经比较环节可知偏差e=F-Pf>0。在此,数字脉冲的比较,可采用上一节中脉冲比较伺服系统的可逆计数器方法,所以偏差e也是一个数字量。该值经数—模变换就可以变成后续调速系统的速度给定信号(模拟量)。于是,伺服电动机向指令位置(正向)转动,并带动旋转变压器的转子作相应旋转。从此,转子位移角θ超前于激磁信号的φ角,转子感应电动势幅值E0m>0,经鉴幅器和电压—频率变换器,转换成相应的反馈脉冲Pf。按照负反馈的原则,随着Pf的出现,偏差e逐渐减小,直至F=Pf后,偏差为零,系统在新的指令位置达到平衡。但是,必须指出:由于转子的转动使θ角发生了变化,若φ角不跟随作相应变化,虽然工作台在向指令位置靠近,但θ-φ的差值反而进一步扩大了,这不符合系统设计要求。为此,应把反馈脉冲同时也输入到定子激磁电路中,以修改电气角φ的设定输入,使φ角跟随θ变化。一旦指令脉冲F重新为零,反馈脉冲Pf方面应使比较环节的可逆计数器减到零,令偏差e→0;另一方面也应使φ角增大,令θ-φ→0,以便在新的平衡位置上转子电动势的幅值E0m→0。
若指令脉冲F为负时,整个系统的检测,比较判别以及控制过程与上述F为正时基本上类似,只是工作台应向反向进给,转子位移角θ减小,φ也必须跟随减小,直至在负向的指令位置达到平衡。
从上述过程可以看出,在幅值系统中,激磁信号中的电气角φ由系统设定,并跟随工作台的进给作被动的变化。可以利用这个φ值,作为工作台实际位置的测量值,并通过数显装置将其显示出来。当工作台在进给后到达指令所规定的平衡位置并稳定下来,数显装置所显示的是指令位置的实测值。
2.鉴幅器
由上述幅值比较原理可知,转子电动势E0是一个正弦交变的电压信号,其幅值E0m与角度差值θ-φ在±90°范围内,该幅值的绝对值∣E0m∣才与∣sin(θ-φ)∣成正比,而幅值的数符由θ-φ的符号决定。即,当θ=φ时,E0m=0;当θ>φ时,E0m为正;θ<φ时,E0m为负。该幅值的数符表明了指令位置与实际位置之间超前或滞后的关系。θ与φ的差值越大,则表明位置的偏差越大。
图5-43是一个实用数控伺服系统中实现鉴幅功能的鉴幅器原理框图。图中E0是由旋转变压器转子感应产生的交变电动势,其中包含了丰富的高次谐波和干扰信号。低通滤波器Ⅰ的作用是滤除谐波的影响和获得与激磁信号同频的基波信号。例如,若激磁频率为800Hz,则可采用1000Hz的低通滤波器。运算放大器A1为比例放大器,A2则为1∶1倒相器。K1、K2是两个模拟开关,分别由一对互为反相的开关信号 和SL实现通断控制,其开关频率与输入信号相同。由这一组器件(A1、A2、K1、K2)组成了对输入的交变信号的全波整流电路,即,在0~π的前半周期中,SL=1,K1接通,A1的输出端与鉴幅输出部分相连;在π~2π的后半周期中,SL=1,K2接通,输出部分与A2相联。这样,经整流所得的电压UE将是一个单向脉动的直流信号。低通滤波器Ⅱ的上限频率设计成低于基波频率,在此可设为600Hz,则所输出的UF是一个平滑的直流信号。
和SL实现通断控制,其开关频率与输入信号相同。由这一组器件(A1、A2、K1、K2)组成了对输入的交变信号的全波整流电路,即,在0~π的前半周期中,SL=1,K1接通,A1的输出端与鉴幅输出部分相连;在π~2π的后半周期中,SL=1,K2接通,输出部分与A2相联。这样,经整流所得的电压UE将是一个单向脉动的直流信号。低通滤波器Ⅱ的上限频率设计成低于基波频率,在此可设为600Hz,则所输出的UF是一个平滑的直流信号。
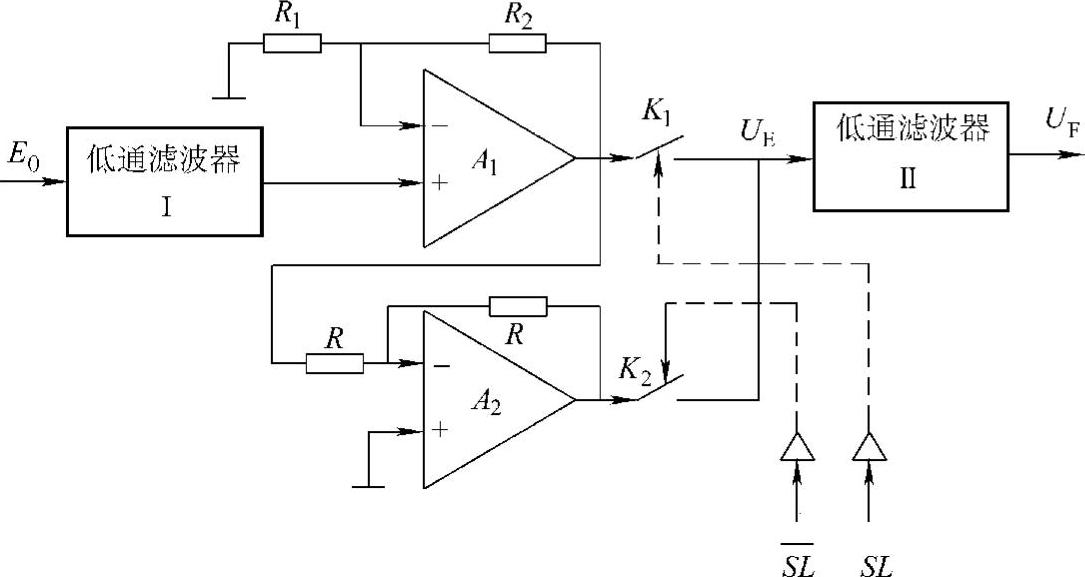
图5-43 鉴幅器原理框图
图5-44所示为当输入的转子感应电动势E0分别在工作台作正向或反向进给时,开关信号SL、脉动的直流信号UE和平滑直流输出UF的波形图。由图可知鉴幅器输出信号UF的极性表示了工作台进给的方向,UF绝对数值的大小反映了θ与ϕ的差值。
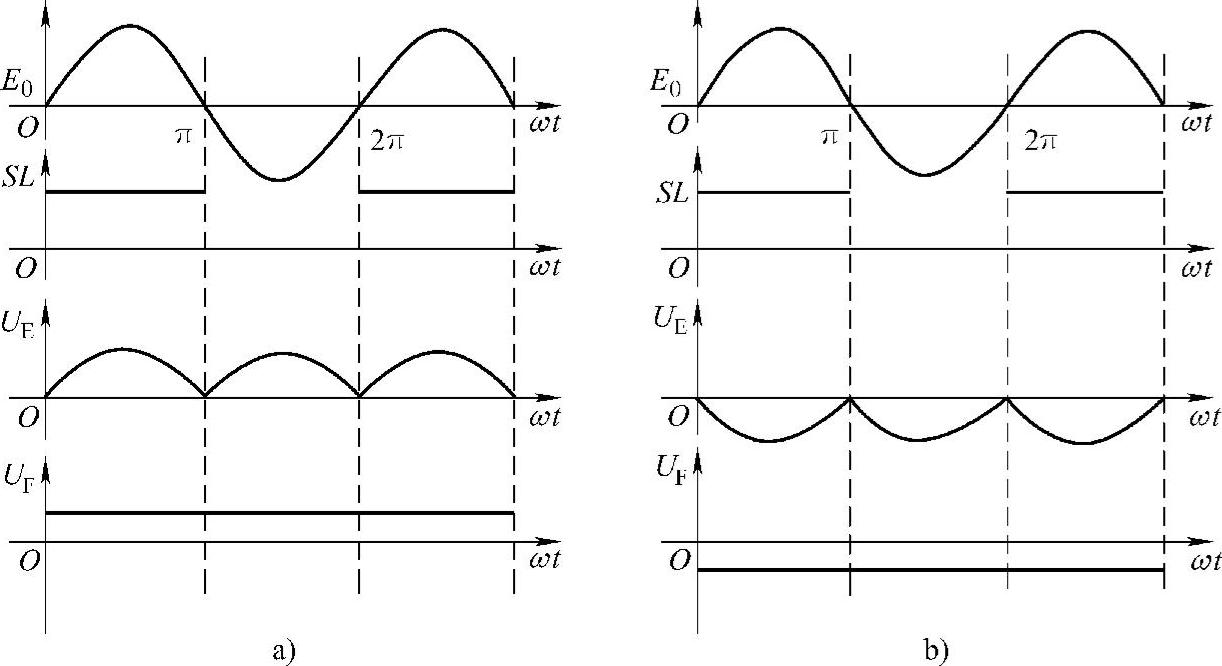
图5-44 鉴幅器输出波形图
a)正向运动(θ>ϕ) b)反向运动(θ<ϕ)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。