



凸轮副结构是一种常见的机械机构。每个凸轮只能有一个从动机构,如果要为一个具有多从动机构的凸轮建模,则必须为每个新的连接副定义新的凸轮从动机构连接,必要时可以为各连接的其中一个凸轮选取相同的几何参考。
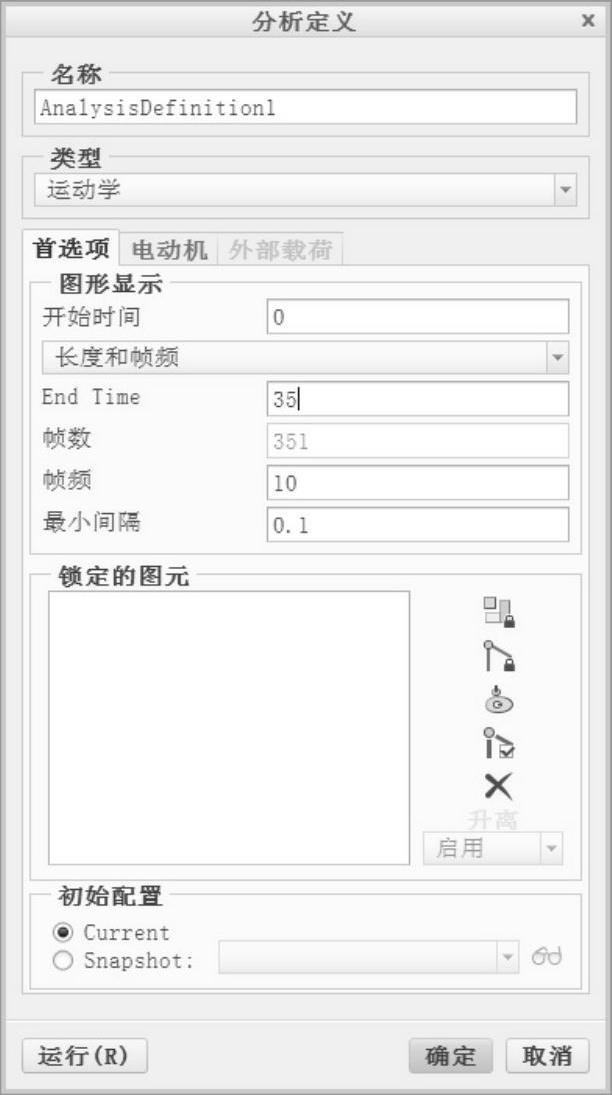
图5-112 设置分析的优先选项

图5-113 定义伺服电动机工作时间
在机构模式中,从功能区“机构”选项卡的“连接”组中单击“凸轮”按钮 ,打开 图5-114所示的“凸轮从动机构连接定义”对话框。定义凸轮从动机构连接需要定义的两个凸轮,主要分别利用“凸轮1”和“凸轮2”选项卡来定义。
,打开 图5-114所示的“凸轮从动机构连接定义”对话框。定义凸轮从动机构连接需要定义的两个凸轮,主要分别利用“凸轮1”和“凸轮2”选项卡来定义。

图5-114 “凸轮从动机构连接定义”
在“凸轮1”选项卡上,单击“曲面/曲线”选项组中的 按钮,便需要在第一主体上选取曲面或者曲线来定义第一个凸轮。单击“反向”按钮,则反转凸轮曲面的法向。如果为其中一个凸轮选取了曲面或平面,那么使用“深度显示设置”选项组中的选项和选择的有效参考来定义凸轮深度,更改凸轮的直观显示等。在“深度显示设置”下拉列表框中可供选择的选项有“Automatic(自动)”“Front&Back(前面和后面)”“Front,Backt&Depth(前面、后面和深度)”“Center&Depth(中心和深度)”。
按钮,便需要在第一主体上选取曲面或者曲线来定义第一个凸轮。单击“反向”按钮,则反转凸轮曲面的法向。如果为其中一个凸轮选取了曲面或平面,那么使用“深度显示设置”选项组中的选项和选择的有效参考来定义凸轮深度,更改凸轮的直观显示等。在“深度显示设置”下拉列表框中可供选择的选项有“Automatic(自动)”“Front&Back(前面和后面)”“Front,Backt&Depth(前面、后面和深度)”“Center&Depth(中心和深度)”。
类似地,在“凸轮2”选项卡上进行相应的设置。
切换到对话框的“属性”选项卡,如图5-115所示。勾选“启用升离”复选框和“摩擦”复选框时,可以设置凸轮副的一些较为重要的参数,如恢复系数e、静摩擦系数μs和动摩擦系数μk。其中,恢复系数e也称还原系数e。

图5-115 定义凸轮从动机构连接的属性
扩展知识:关于恢复系数和凸轮从动机构摩擦。
1)恢复系数
恢复系数是两个图元碰撞前后的速度比,它取决于材料属性、主体几何以及碰撞速度等因素。指定恢复系数的值可用来模拟冲击力,对机构应用恢复系数可在刚体计算中模拟非刚性属性。典型的恢复系数可以从工程书籍或实际经验中得到。
2)凸轮从动机构摩擦
摩擦是由于两个表面之间的相向运动或相对运动而产生的,会导致能量损失。摩擦系数取决于接触材料的类型以及实验条件。典型的摩擦系数可以从相关的物理或工程书籍中查找到。
可以为凸轮从动机构或槽从动机构连接指定静摩擦和动摩擦。要注意的是只有允许升离的凸轮摩擦才可用。而且必须将摩擦应用到凸轮从动机构连接中,才能在力平衡分析中计算凸轮滑动测量。初学者要初步理解如下3点基本概念。
●两个表面的静摩擦系数必定大于同样的两个表面的动摩擦系数。
●静摩擦系数描述模型中开始运动所需的能量。
●动摩擦系数描述保持模型运动时因摩擦而损失的能量。
下面介绍一个凸轮从动机构连接的应用实例。所用到的源文件位于随书光盘的CH5→TSM_5_8文件夹中。
步骤1:打开源文件。
1)在“快速访问”工具栏中单击“打开”按钮 ,选择tsm_5_8.asm,单击“打开”按钮。
,选择tsm_5_8.asm,单击“打开”按钮。
2)设置在模型树中显示特征,此时如图5-116所示,该装配组件中建立有一个只存在基准轴和曲面的骨架模型,并存在着采用“销”联接的凸轮和采用“滑块(滑动杆)”连接的凸轮导杆。注意骨架模型中的曲面是用来导向凸轮导杆运动的。
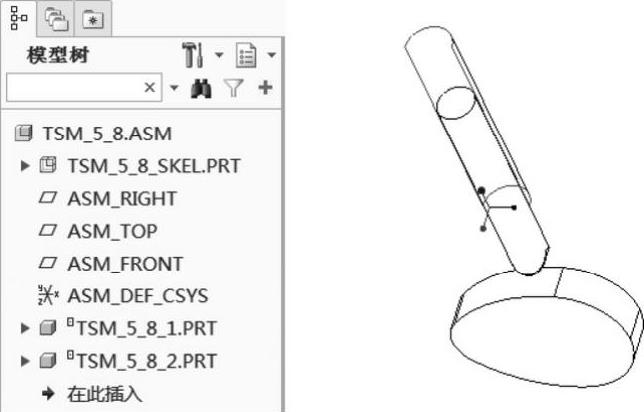
图5-116 原始模型
步骤2:定义凸轮连接。
1)从功能区中单击“应用程序”→“机构”按钮 ,进入机构模式。
,进入机构模式。
2)在功能区“机构”选项卡的“连接”组中单击“凸轮”按钮 ,打开“凸轮从动机构连接定义”对话框。(https://www.xing528.com)
,打开“凸轮从动机构连接定义”对话框。(https://www.xing528.com)
3)在“名称”文本框中输入Cam_Follower1。
4)在“凸轮1”选项卡的“曲面/曲线”选项组中,勾选“自动选择”复选框,接着单击图5-117所示的曲面,单击鼠标中键确认,系统自动选择整个有效的凸轮曲面。
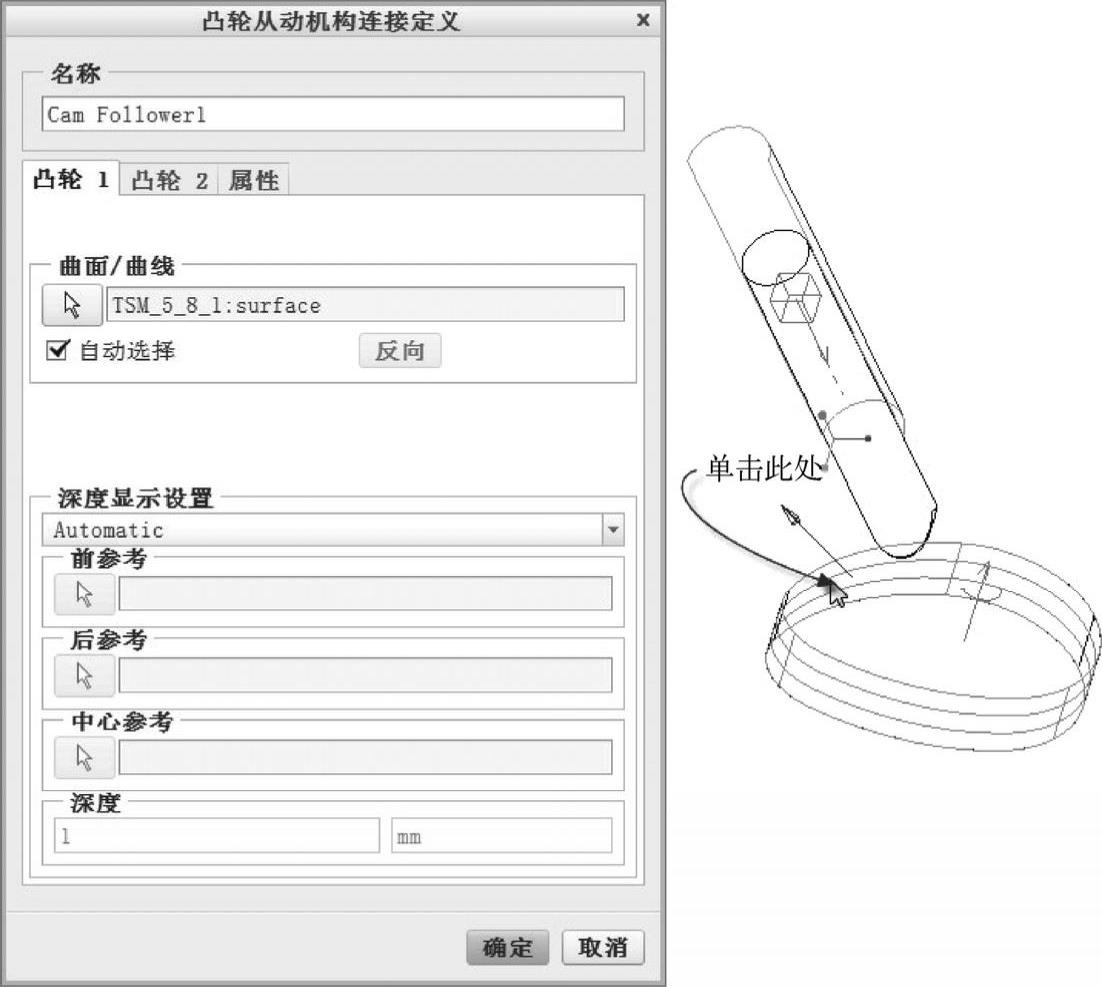
图5-117 选择凸轮曲面
5)切换到“凸轮2”选项卡,单击图5-118所示的导杆曲面,单击鼠标中键确认。此时在机构模型中出现凸轮连接的图标。
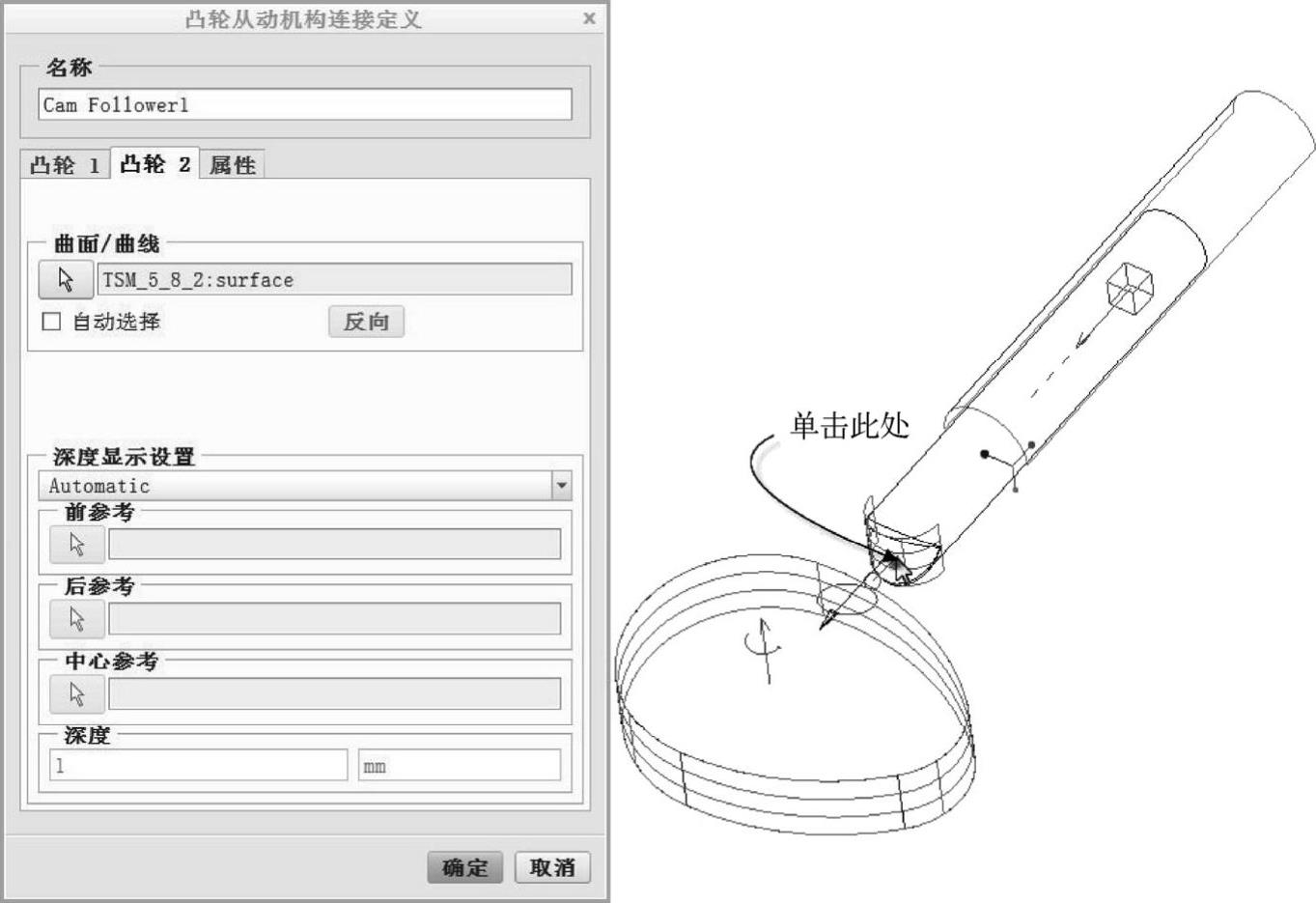
图5-118 选择导杆的曲面
6)在“凸轮从动机构连接定义”对话框中单击“确定”按钮。这时候,导杆曲面与凸轮曲面连接在一块,如图5-119所示。
步骤3:定义驱动(伺服电动机)。
1)单击“伺服电动机”按钮 ,打开“伺服电动机定义”对话框。
,打开“伺服电动机定义”对话框。
2)输入名称为Tsm_ServoMotor1,在模型中选择凸轮的Connection_1.axis_1连接轴,此时如图5-120所示。
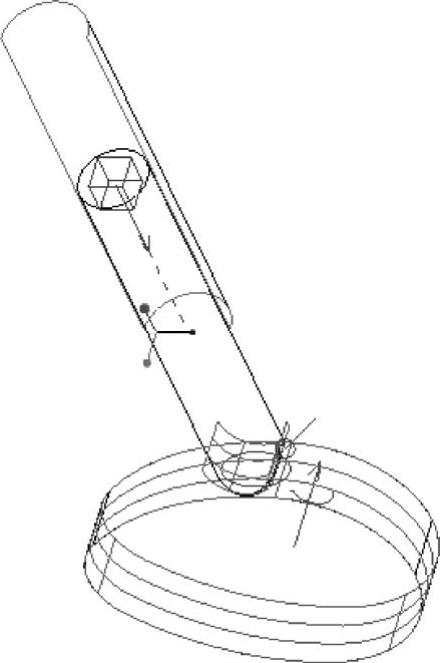
图5-119 定义好凸轮从动结构连接
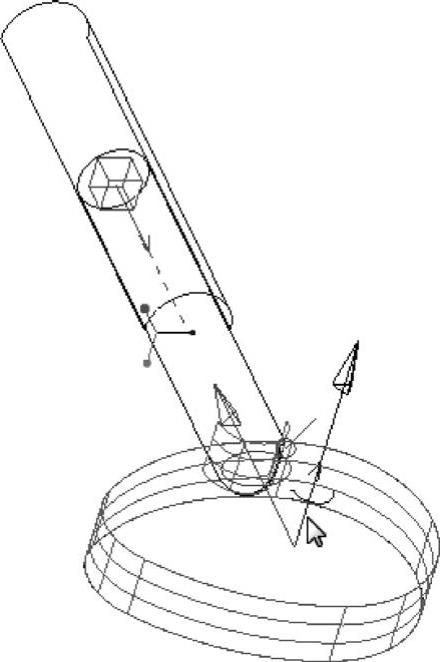
图5-120 选择运动轴
3)切换到“轮廓”选项卡,从“规范”选项组的下拉列表框中选择“速度”选项,从“模”选项组的下拉列表框中选择“常量”选项,输入A值为20。
4)单击“应用”按钮后再单击“确定”按钮。
步骤4:定义运动。
1)单击“机构分析”按钮 ,打开“分析定义”对话框。
,打开“分析定义”对话框。
2)接受默认的分析名称,接着在“类型”选项组的下拉列表框中选择“运动学”选项。
3)在“首选项”选项卡的“图形显示”选项组中,设置“开始时间”为0,End Time为30,选择“长度和帧频”选项,“帧频”为10。
4)单击“运行”按钮,然后单击“确定”按钮。
步骤5:回放凸轮运动。
1)在功能区“机构”选项卡的“分析”组中单击“回放”按钮 ,打开“回放”对 话框。
,打开“回放”对 话框。
2)在“回放”对话框中,选择所建立的分析,接着单击对话框中的“播放当前结果集”按钮 ,弹出“动画”对话框。
,弹出“动画”对话框。
3)调整机构的运动速度,单击“播放”按钮 ,回放机构运动的动画,如 图5-121所示。
,回放机构运动的动画,如 图5-121所示。
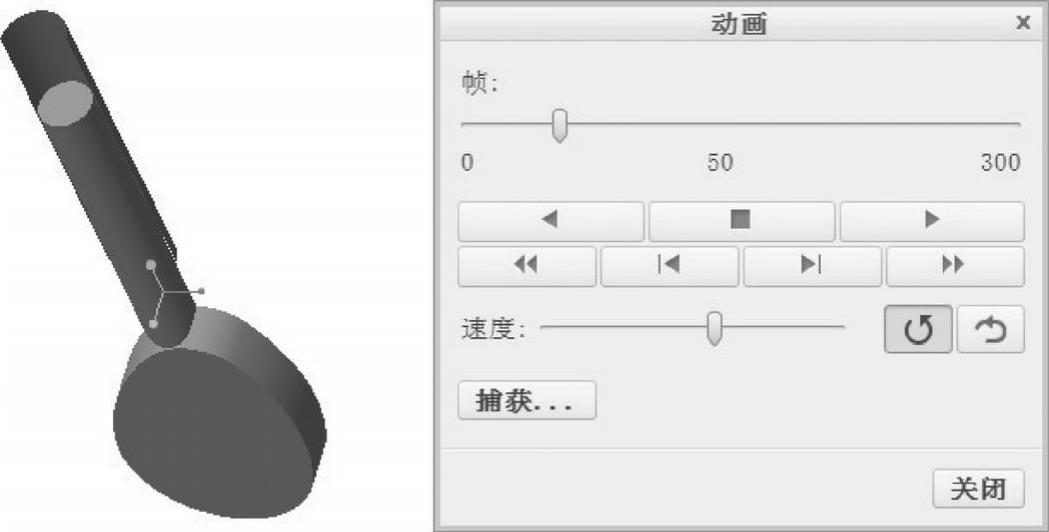
图5-121 回放机构运动的动画
4)单击“捕获”按钮,打开“捕获”对话框。接受默认选项,单击“确定”按钮,将运动动画保存为MPEG格式的文件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。