



利用Mechanical界面中的分析树所列流程执行项目分析相关操作。下面分别加以介绍。
1.几何模型
【Geometry(几何)】节点选项给出了模型的组成部分,通过该分析可了解几何体的相关信息。
(1)几何体 在模拟分析过程中,实体的体/面/部件(二维或三维)、只由面组成的面体、只由线组成的线体3种类型的实体会被分析。
✧ 实体:三维实体是由带有二次状态方程的高阶四面体或六面体实体单元进行网格划分的。二维实体是由带有二次状态方程的高阶三角形或四边形实体单元进行网格划分的。结构的每个节点含有3个平动自由度(DOF)或对热场有一个温度自由度。
✧ 面体:面体指几何上为二维,空间上为三维的体素。面体为有一层薄膜(有厚度)的结构,厚度为输入值,面体通常由带有6个自由度的线性壳单元进行网格划分。
✧ 线体:线体指几何上为一维、空间上为三维的结构,用来描述与长度方向相比其他两个方向的尺寸很小的结构,截面的形状不会显示出来。线体由带有6个自由度的线性梁单元进行网格划分。
✧ 多体部件体:在DM中可以有多体部件体存在,而在其他很多应用程序中体和部件通常是一样的。多体部件中共同边界的地方节点是共用的。如果节点是共享的,则不需要定义接触。
(2)为体添加材料 在进行项目分析时,需要为体添加材料属性,添加时在窗口左侧【Outline(分析树)】中选择【Geometry】节点下的相应实体,此时在【Details of“XXX”(参数列表)】中显示模型参数。单击【Material】节点下的【Assignment】选项,然后单击 按钮,选择相应材料,如图4-10所示。
按钮,选择相应材料,如图4-10所示。
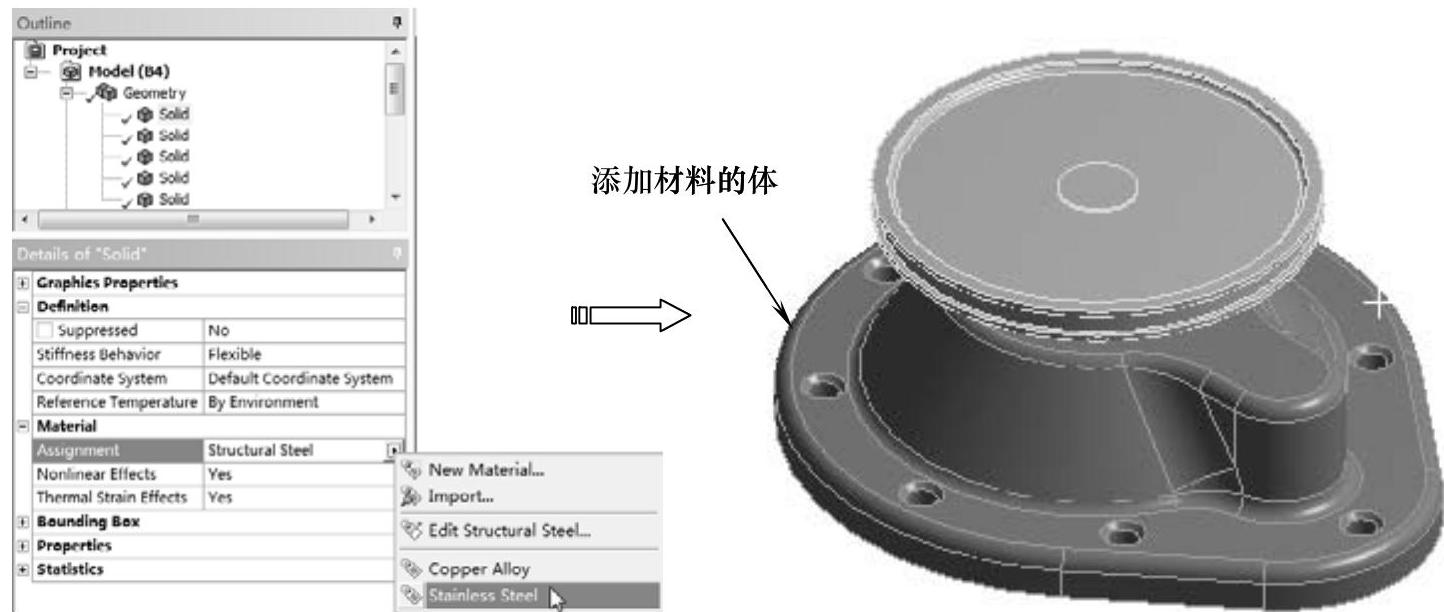
图4-10 设置实体材料
2.坐标系
在Mechanical中,Coordinate Systems用于网格控制、质量点、指定方向载荷和结果显示等。当模型是基于CAD的原始模型时,Mechanical会自动添加Global CoordinateSystem(整体坐标系),整体坐标系为固定的笛卡儿坐标系;也可以创建Local Coordinate Systems。
在【Outline(分析树)】中选择【Coordinate System】节点,显示【坐标系】工具栏以及相关【坐标系】详细设置窗口,如图4-11和图4-12所示。

图4-11 【坐标系】工具栏
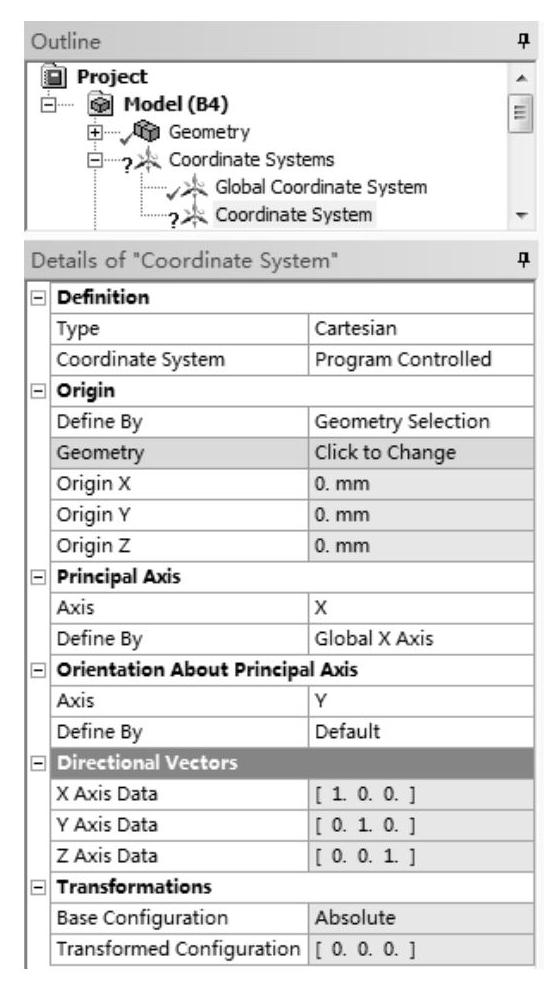
图4-12 【坐标系】详细设置窗口
(1)定义坐标系 在【Outline(分析树)】中选择【Coordinate System】节点,单击【Coordinate Systems】工具栏上的【Create Coordinate System】按钮 ,在分析树中自动插入【Coordinate System】节点。
,在分析树中自动插入【Coordinate System】节点。
(2)坐标系类型(Definition)属性窗口中的【Definition】可定义坐标系类型和编号,包括以下选项:
✧ Type(类型):用于定义坐标系类型,包括笛卡儿坐标系和圆柱坐标系,圆柱坐标系可用于零件、位移及施加在面体上的力。
✧ Coordinate System(坐标系):选择程序控制(Program Controlled)由程序分配坐标系的参考号,选择Manual人工控制可指定坐标系的参考号大于或等于12。
(3)坐标原点 属性窗口中的【Origin】可定义坐标系原点,【Define By】下拉列表中包括以下原点定义方式:
✧ Geometry Selection(几何选择):在窗口中选择几何元素定义坐标原点,如图4-13所示。坐标系原点的位置与所选几何关联,其位置随几何模型改变而改变。
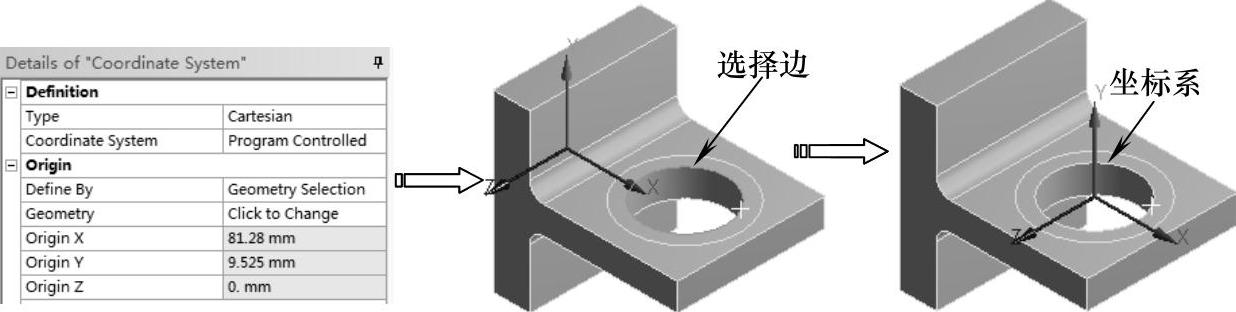
图4-13 Geometry Selection(几何选择)
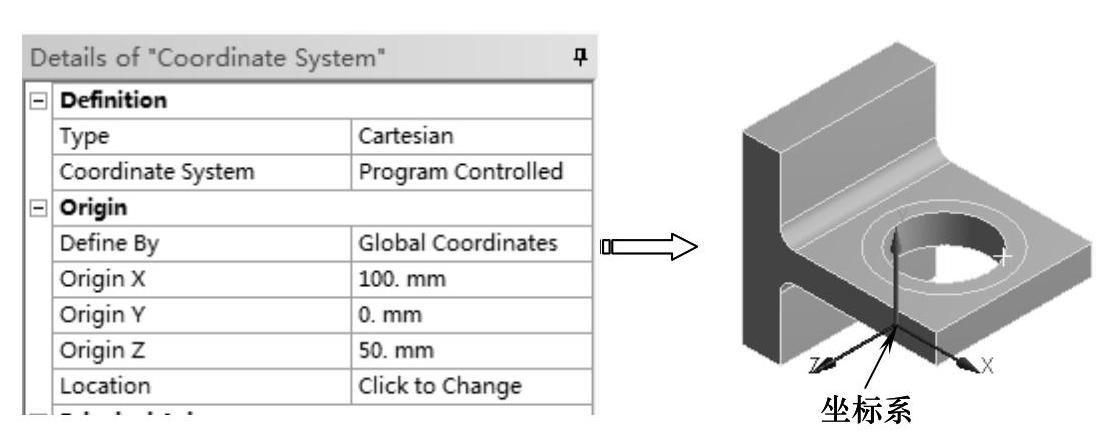
✧ Global Coordinates(整体坐标):选择整体坐标系为参考创建原点,可在【Origin X】、【Origin Y】、【Origin Z】中输入原点在整体坐标系中的位置。该方式创建的坐标系独立于任何几何模型,如图4-14所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-14 Global Coordinates(整体坐标)
注意:选择一个点,坐标系原点为该点;选择多个点,原点为多点包围的面积或体积中心;选择一个面或一条边,原点为该面或该边的中心;选择圆柱,原点为圆柱的中心;选择圆或圆弧,原点为圆弧中心。
(4)主轴和方向 坐标系需要定义【Principal Axis(主轴矢量)】和【Orientation About Principal Axis(主轴方向矢量)】,这两个矢量形成坐标系平面和主轴对齐,如图4-15所示。

图4-15 主轴和方向
3.连接关系
当几何体存在多个部件时,需要确定部件之间的相互关系,在ANSYS Workbench中可通过【Connections】来定义。连接关系【Connections】可以通过【Mesh Connections(网格连接)】、【Contacts(接触关系)】、【Joints(关节连接)】等来实现。当加入接触关系后,程序自动检测并添加接触关系,而其他连接关系则需要手工加入。
连接属性窗口中包括自动检测功能和透明显示功能,自动检测功能用于设置是否在刷新几何模型时生成自动连接关系,如图4-16所示。
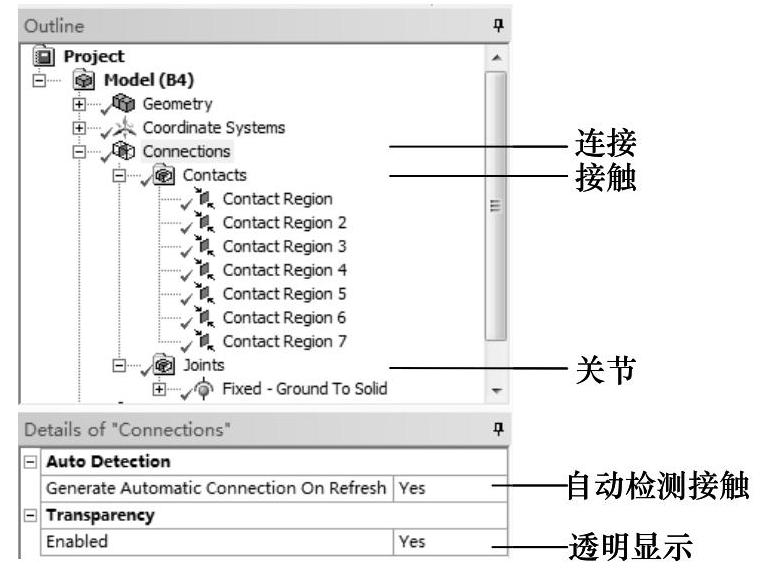
图4-16 连接属性窗口
(1)【Contacts(接触关系)】接触包括面/面、面/边、边/边之间的接触和点焊接触等。当装配体输入时,两个零件之间自动形成接触,接触连接可传递结构载荷和热流。在Mechanical中系统提供了5种不同的接触类型:Bonded(绑定)、No Separation(不分离)、Frictionless(光滑无摩擦)、Rough(粗糙)及Frictional(摩擦)。
(2)【Joints(关节连接)】【Joints(关节连接)】用来模拟几何体中两点之间的连接关系,每一个点有6个自由度,两点间的相对运动由6个相对自由度描述,每个运动副的运动方向由关节参考坐标系的方向确定。
4.网格划分
【Mesh(网格)】节点用于对模型进行网格划分,网格划分的相关内容在第3章已经讲解,这里不再赘述。结构分析中要注意以下几点:
✧ 接触面提供适当精细的网格密度可使接触应力平滑分布。
✧ 对应力应变感兴趣的区域,网格划分应好于对位移感兴趣的区域。
✧ 考虑结构非线性时,几何模型需要更细的网格,如塑性变形梯度很大的地方,由于需要合理的积分点密度,因此需要好的网格质量。
5.分析设置
Mechanical中的Analysis Settings提供了一般求解过程控制,如结构静力学分析中分析设置包括“Step Controls(求解步控制)”“Solver Controls(求解控制)”“Restart Controls(重启动控制)”“Nonlinear Controls(非线性控制)”“Output Controls(输出控制)”“Analysis Data Management(分析数据管理)”等,如图4-17所示。
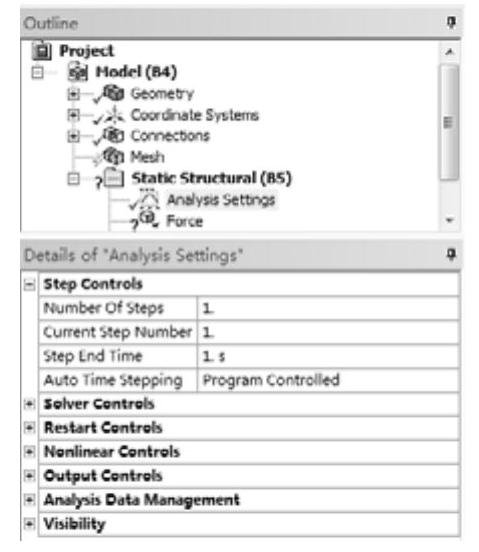
图4-17 Analysis Settings分析设置
6.载荷和约束
载荷和约束是ANSYS Workbench求解计算的边界条件,它们是以所选单元的自由度的形式来定义的。如结构分析中Mechanical中有4种类型的载荷:惯性载荷、结构载荷、结构约束和热载荷等。
7.模型求解
当所有的设置完成之后,单击标准工具箱里的【求解】按钮 ,即可求解模型,相关内容参考“4.4模型求解”。
,即可求解模型,相关内容参考“4.4模型求解”。
8.结果后处理
Workbench结果后处理可得到多种结果,如各方向或总变形、应力应变、接触工具等,相关内容参考“4.5结果数据后处理”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。