



接触是一种高度非线性行为,计算时一般需要较多的计算资源,因此理解接触的实质、建立合理有效的模型、设置有效接触参数是至关重要的。
1.接触和接触算法
当两个物体表面相互接触并相切时,二者处于接触状态。在形成接触的不同物体的表面之间,可以沿法向自由分离和沿切向相互移动,但不能发生相互渗透,可传递法向压缩力和切向摩擦力,但不能传递法向拉伸力,如图8-3所示。
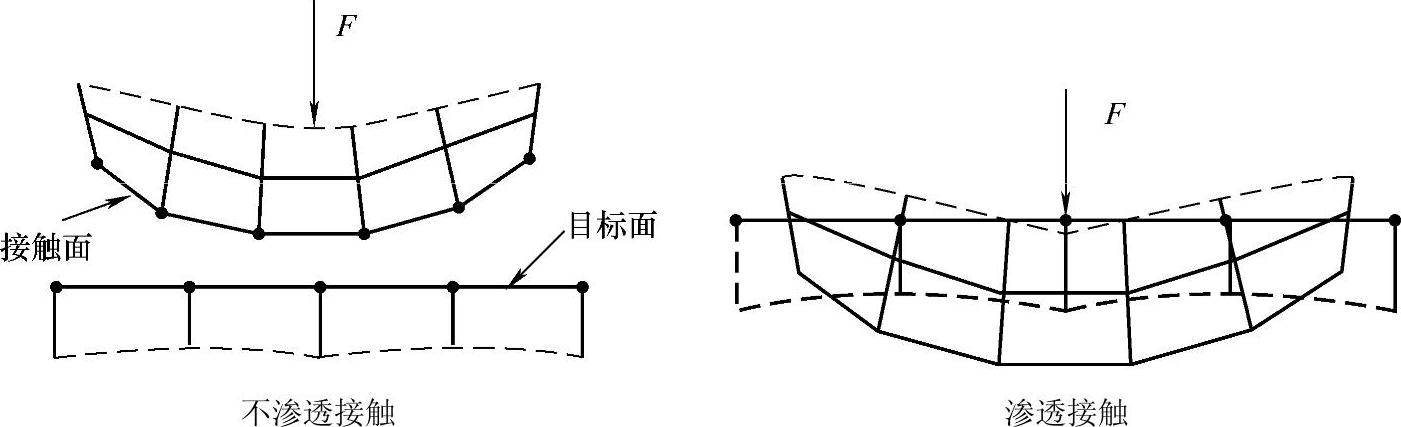
图8-3 接触方式
接触表面间不能发生互相穿透,接触算法必须在接触表面间建立某种关系来模拟此特性,这称为强制接触协调。在Mechanical中提供了纯粹的罚函数法(Pure Penalty)、纯拉格朗日法(Normal Lagrange)、多点约束方程法(MPC)、增强拉格朗日法(Augmented Lagrange)等,以执行强制接触协调。
(1)罚函数法 罚函数的基本原理是:计算每一载荷子步时先检查接触面和目标面间是否存在穿透,若没有则不作处理。如果有穿透,则在目标面和接触面间引入一个法向接触力FN:
FN=KNX
式中,KN为法向接触刚度;x为穿透深度(见图8-4)。
这相当于在接触面和目标面间沿法向放置一个弹簧,以限制穿透的大小。接触刚度越大,则穿透就越小,理论上在接触刚度为无穷大时,可实现真实的接触状态,使穿透值等于零。但是,接触刚度过大会导致总体刚度矩阵病态,造成收敛困难。也就是说,接触刚度较大时,计算精度较高,但收敛困难。
(2)纯拉格朗日法 拉格朗日法与罚函数不同,不是采用力与位移的关系来求接触力,而是把接触力作为一个独立自由度直接求解,如图8-5所示。
FN=DOF
该方法可得到0或接近0的穿透量,以得到真实接触条件,是一种精确的接触算法。但由于自由度的增加,会使计算效率降低,在接触状态发生急剧变化时,会产生震颤。
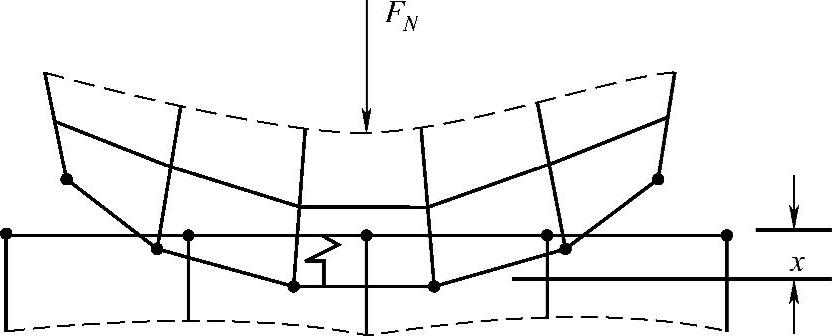
图8-4 穿透量

图8-5 拉格朗日接触
(3)增强拉格朗日法 增强拉格朗日法与罚函数法的区别是,在罚函数法计算的法向接触力的基础上增加额外的接触力λ,使得计算对接触刚度的变化不像罚函数法那么敏感。
FN=KNx+λ
(4)多点约束方程法 对于特定的绑定和不分离两个面间的接触类型,可采用多点约束法。多点约束是通过在内添加约束方程来连接接触面间的位移的,如图8-6所示。
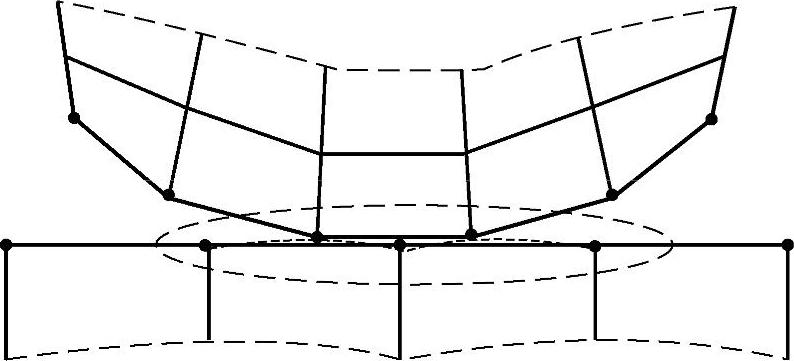
图8-6 多点约束法接触
多点约束法不是罚函数法或拉格朗日法,而是直接处理绑定接触区域相关接触面的一种方式;多点约束法支持大变形效应。
2.接触类型
在ANSYS Workbench中接触(Contacts)包括面/面、面/边、边/边之间的接触(Contact)和点焊接触(Spot Weld),当装配体输入时,两个零件之间自动形成接触,接触连接可传递载荷和热流。
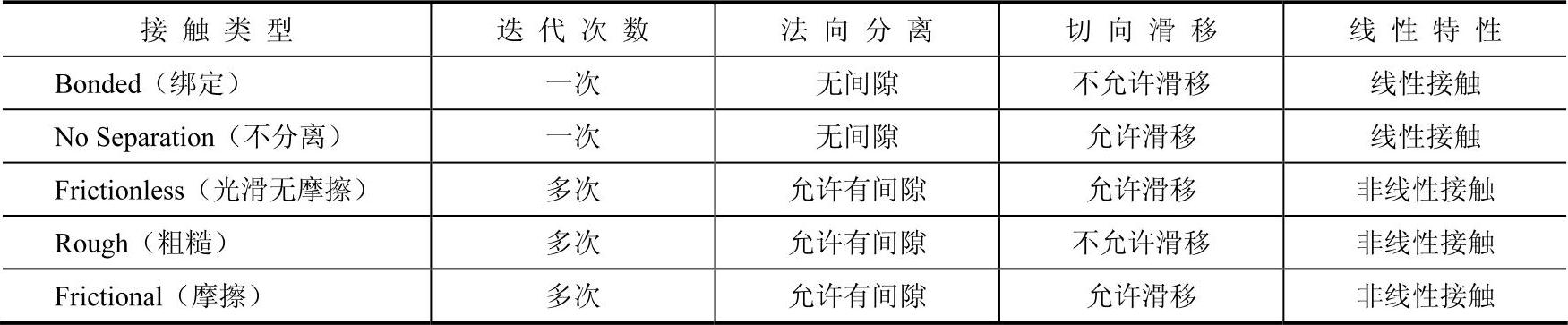
在Mechanical中系统提供了5种不同的接触类型:Bonded(绑定)、No Separation(不分离)、Frictionless(光滑无摩擦)、Rough(粗糙)及Frictional(摩擦),这5种类型的接触特点见表8-1。
表8-1 接触类型和特点
3.接触控制
默认设置是由CAD系统导入装配体,程序自动检测接触并通过面与面的关系分配接触区域。通常接触默认设置和自动检测功能可处理大多数接触问题,但接触控制功能提供了更广泛的接触模拟,如图8-7所示。
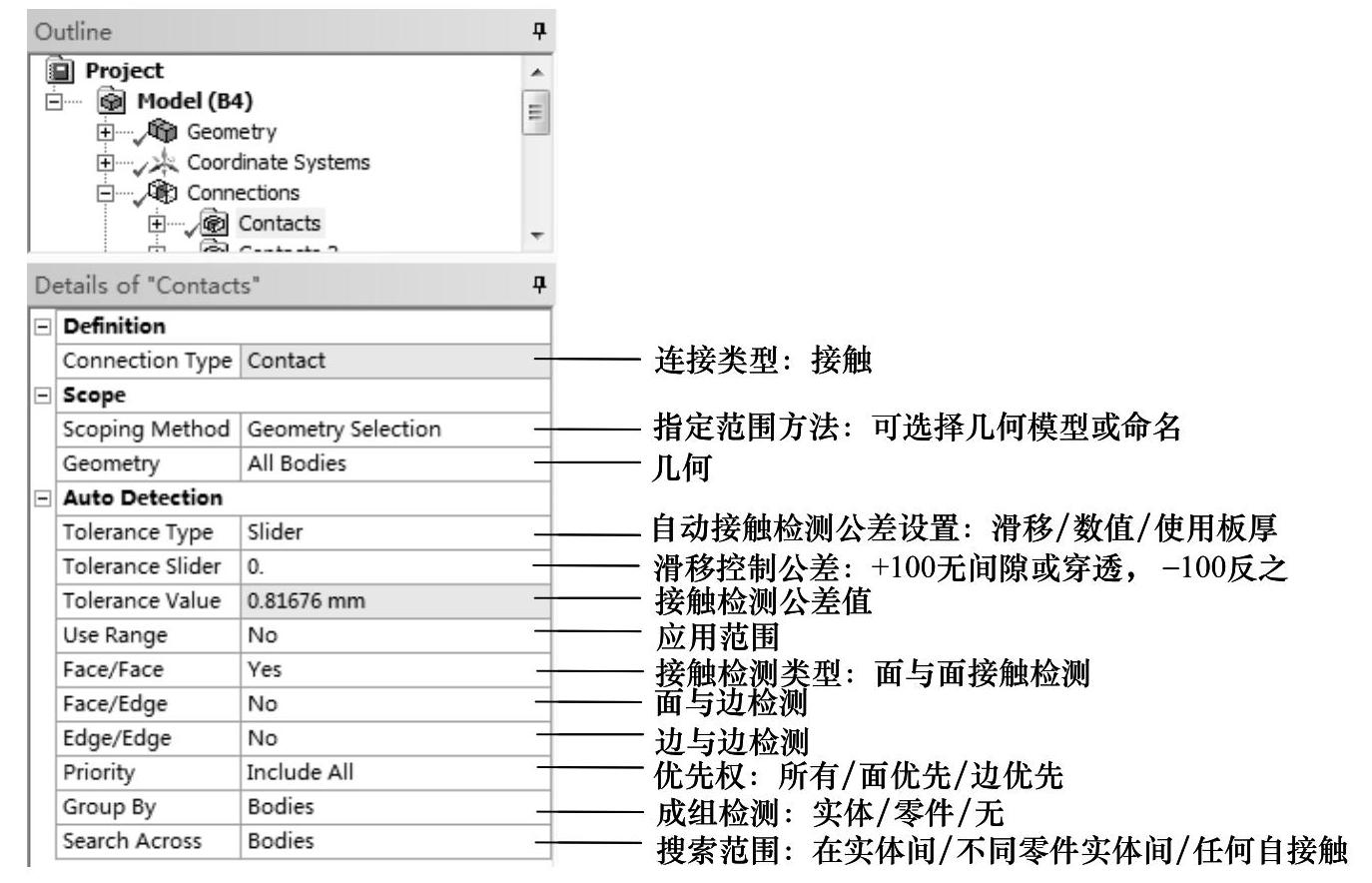
图8-7 【Contacts】详细设置窗口
✧ Priority(优先权):可选择包括所有(Include All)、面优先(Face Overrides)、边优先(Edge Overrides)。面优先指面与面接触优先于面与边接触,不含边与边接触;边优先指边与边接触优于面与边接触,不含面与面接触。
✧ Group By(成组检测):可选择实体(Bodies)、零件(Part)和无(None)。按实体成组指在一个接触区允许有多个面或边,按零件成组允许多个零件包含一个独立区域,不成组则生成的任何接触区的目标对象或接触对象上仅有一个面或边,如果一个单独区域包含大量的接触及目标面,则不成组检测方法可避免过多的接触搜索时间。另外,该选项也适用于不同的接触区域定义不同的接触行为,如螺栓和支座接触中,可在螺栓螺纹和支座之间定义绑定接触,而在螺栓头和支座之间定义无摩擦接触行为。
✧ Search Across(搜索范围):搜索范围的自动检测可选择在实体间(Bodies)、不同零件的实体间(Part)、包含任何自接触的地方(Anywhere)。
4.接触区域控制
接触区域控制包括接触范围(Scoping)、定义接触(Definition)、高级控制(Advanced)等,如图8-8所示。
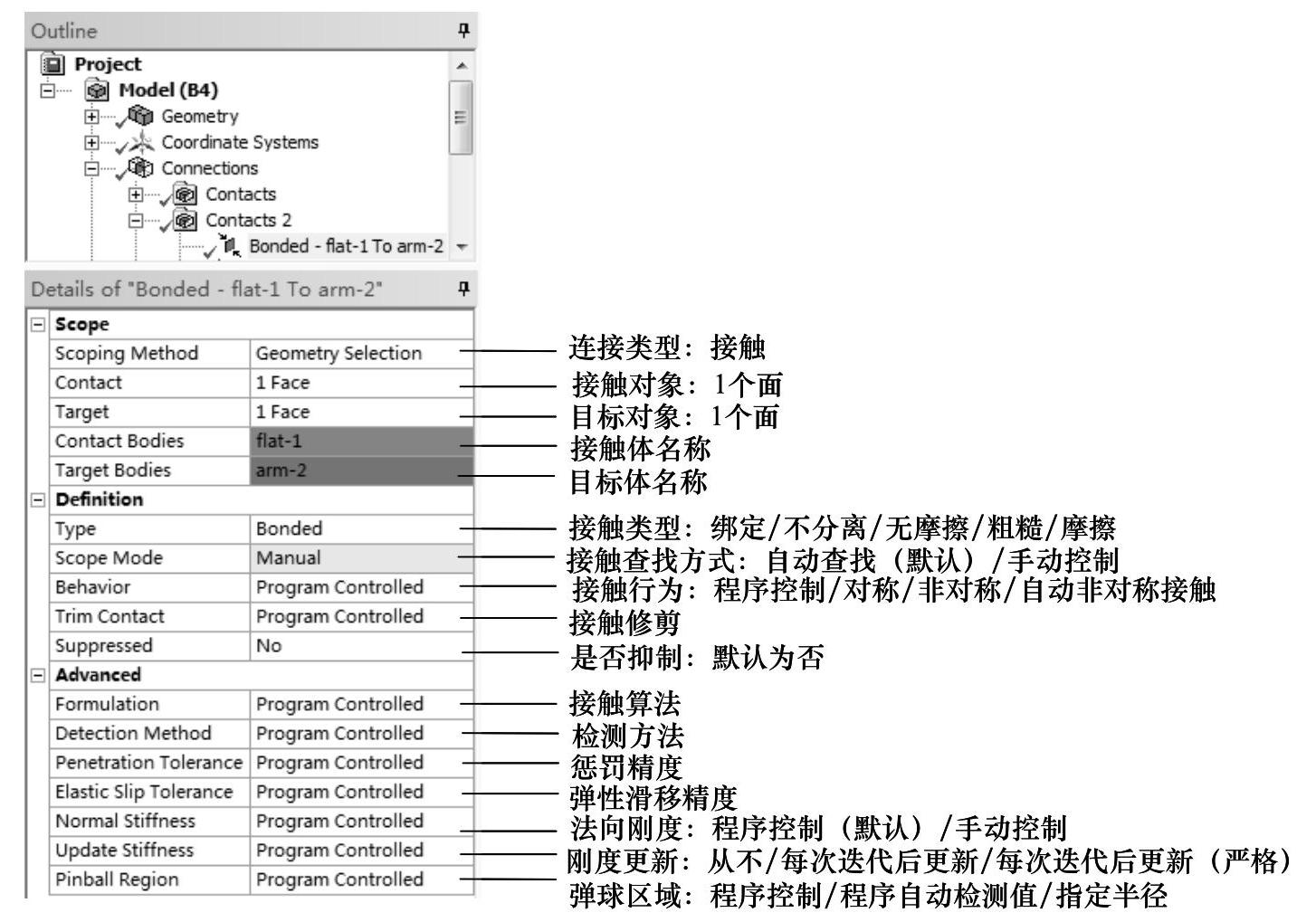
图8-8 【接触】详细设置窗口
(1)Contact和Target(接触面和目标面)在每个接触对中都要定义目标面和接触面。接触区域的其中一个对象构成接触面,此区域的另一对象构成目标面。接触中利用目标面的穿透量,在给定公差范围内来限制接触面上的积分点,但是其相反的情况是不正确的。
(2)Type(接触类型)接触类型有5种:绑定/不分离/无摩擦/粗糙/摩擦。(https://www.xing528.com)
✧ Bonded(绑定):默认设置,接触面或边无滑移、无分离,忽略间隙和穿透,线性求解。
✧ No Separation(不分离):类似绑定接触,但是少量无摩擦滑移可以发生(显示动力分析中不支持此类接触)。绑定和不分离接触是最基础的线性行为,仅仅需要一次迭代。
✧ Frictionless(无摩擦):标准的单边接触,也就是如果发生分离,则法向压力为零,摩擦系数为零,允许自由滑移,装配体中会施加弱弹簧以帮助稳定求解。
✧ Rough(粗糙):类似于无摩擦接触,在无滑移处设置完全粗糙的摩擦接触,对应于无限大的摩擦系数(显示动力分析中不支持)。
✧ Frictional(摩擦):摩擦接触中剪应力发生变化,直到发生相对滑移,该状态称为黏结(Sticking),摩擦系数为非负值。
(3)Behavior(接触行为)在Workbench中接触面和目标面的内部指定是非常重要的。在Mechanical中接触面和目标面都会显示在每一个Contact Region(接触区域)中,它们指定了两个相互接触的表面,接触面显示为红色,目标面显示为蓝色。
✧ Asymmetric(不对称接触):当一个面为目标面而另一个面为接触面称为不对称接触,接触面的节点不能穿透目标面。非对称接触行为需要手工指定接触面和目标面。
✧ Symmetric(对称接触):当两个面都为接触面或目标面时称为对称接触,此时任何一边都可穿透到另一边。对称接触行为容易设置,但需要较大计算量。
✧ Auto Asymmetric(自动非对称接触):对于非对称或自动对称行为,仅仅限制接触面不能穿透目标面;自动非对称接触行为中,接触面和目标面的指定可在内部互换。
对于非对称接触行为,手工选择接触表面时应遵循以下原则:
✧ 当凸面与平面或凹面接触时,应选择平面或凹面为目标面。
✧ 当硬表面和软表面接触时,应选择硬表面为目标面。
✧ 当大表面和小表面接触时,应选择大表面为目标面。
✧ 如果结构已划分网格,具有粗糙网格的表面与具有细密网格的表面接触时,应选择粗糙表面为目标面。
(4)接触算法 接触算法从纯粹的罚函数法(Pure Penalty)到增强拉格朗日法(Augmented Lagrange)、多点约束方程法(MPC)或纯拉格朗日法(Normal Lagrange)。其中,增强拉格朗日一般应用于非线性接触模型中,多点约束方程法(MPC)仅适用于绑定接触,在绑定接触中,纯罚函数法可想象为在接触面间施加了十分大的刚度系数来阻止相对滑动,这个结果是在接触面间的相对滑动可忽略的情况下得到的。多点约束方程法对接触面间的相对运动定义了约束方程,因此没有相互的滑动,这个方程经常作为罚函数法的最好取代。
(5)Pinball Region(弹球区域)弹球区域可自定义并在图形区显示。弹球区域定义了近距离开放式接触的位置,而超过弹球区域范围之外的为远距离开放式接触。如果一个在目标面上的节点处于这个球体内,WB-Mechanical就会认为它“接近”接触,而且会更加密切地监测它与接触探测点的关系(也就是说什么时候及是否接触已经建立),在球体以外的目标面上的节点相对于特定的接触探测点不会受到密切监测,如图8-9所示。

图8-9 Pinball区域
弹球区域一般作为十分有效的接触探测器使用,但是它也用于其他方面,例如绑定接触等。对于绑定或不分离的接触,假设间隙或穿透小于弹球区域,则间隙/穿透自动被删除,如对于以MPC为基础的绑定接触,可将搜索器设定为目标法向或弹球区域。假如存在间隙,弹球区域可以用来作为探测越过间隙的接触探测器。
(6)接触刚度 在Workbench Mechanical中默认为罚函数法(Pure Penalty),但在大变形问题的无摩擦或摩擦接触中建议使用增强拉格朗日法(Augmented Lagrange),这是因为增强拉格朗日公式增加了额外的控制自动减少渗透功能。
前面介绍的KN(法向接触刚度)亦称为法向刚度,它只用于Pure Penalty或Augmented Lagrange,它是一个相对因子,一般变形问题建议使用1.0,而对于存在弯曲支配的情况,如果收敛较困难,可以设置小于1.0的值,如图8-10所示。
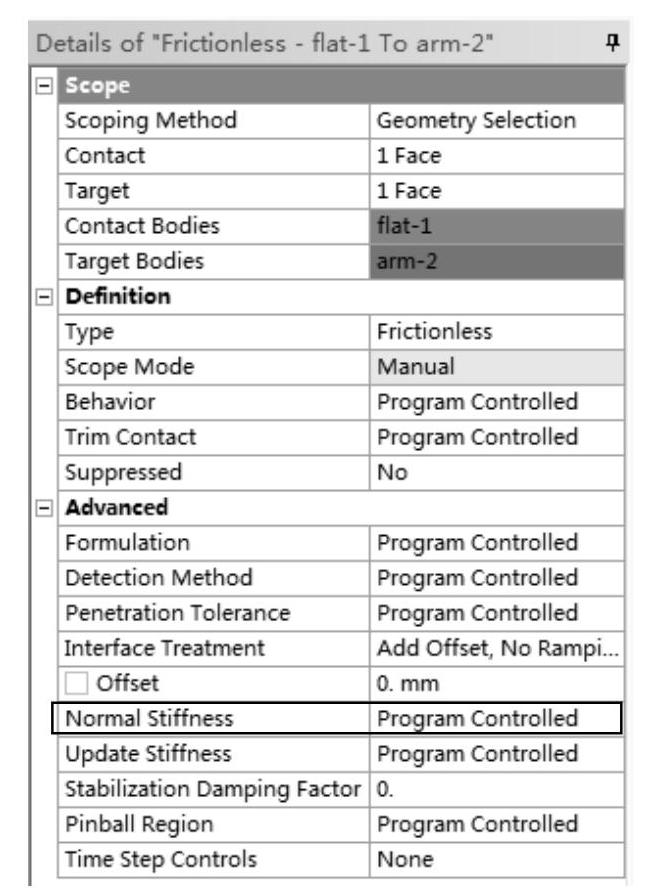
图8-10 法向接触刚度
法向接触刚度是影响精度和收敛行为的重要参数,刚度越大,结果越精确,收敛变得较困难。如果接触刚度太多,模型会振动,接触面会相互弹开,如图8-11所示。
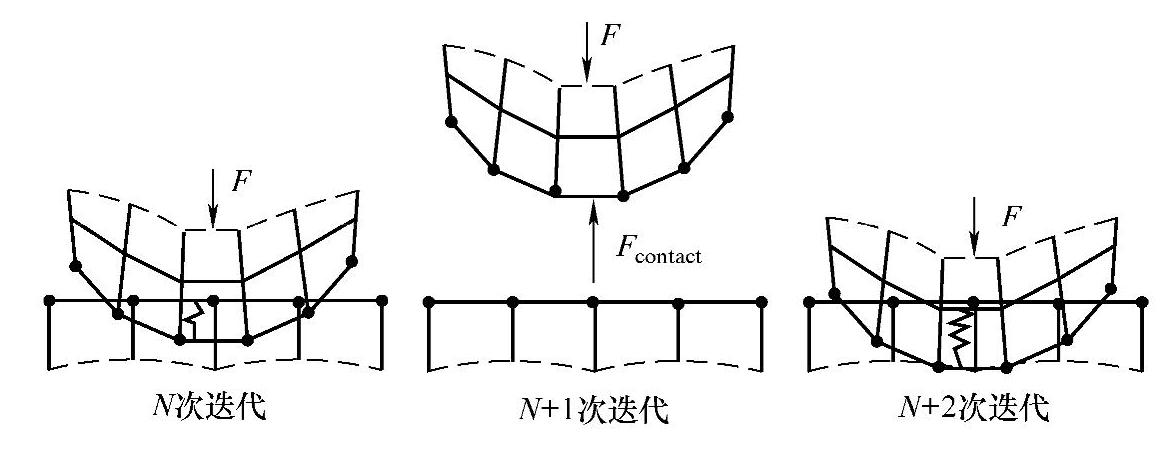
图8-11 法向接触刚度影响
在Mechanical系统中法向接触刚度默认为自动设置,在设置时可输入Normal Stiffness Factor(FKN),它是计算刚度代码的乘积,因子越小,接触刚度就越小。
接触问题中法向接触刚度选择的一般准则如下:
✧ 对于绑定和不分离的接触,默认FKN=10。
✧ 对于其他形式的接触,默认FKN=1.0。
✧ 体积为主的问题:用Program Controlled或手动输入Normal Stiffness Factor为1。
✧ 弯曲为主的问题:手动输入Normal Stiffness Factor为0.01~0.1的数值。
5.接触工具
在Mechanical中使用【Contact Tool】产生接触结果,结果包括“压力(Pressure)”“Penetration(穿透)”“Gap(间隙)”“Frictional Stress(摩擦应力)”“Sliding Distance(滑移距离)”“Status(接触状态)”和“Fluid Pressure(流体压力)”。
单击【Solution】工具栏上的【Tools】|【Contact Tool】命令,在【Outline(分析树)】中的【Solution(A6)】节点下增加【Contact Tool】选项,如图8-12所示。

图8-12 启动【Contact Tool】项
在详细设置窗口的【Type】下拉列表中选择Pressure,然后选中【Pressure】节点,单击鼠标右键,在弹出的快捷菜单中选择【Evaluate All Results】命令,图形区显示压力分布,如图8-13所示。
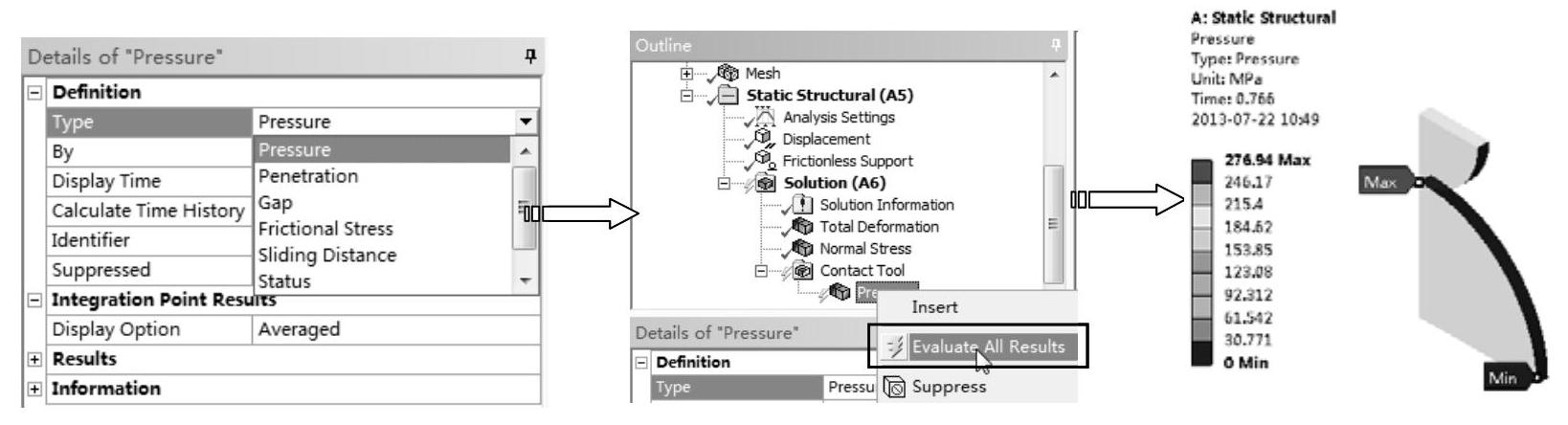
图8-13 接触压力分布
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。