



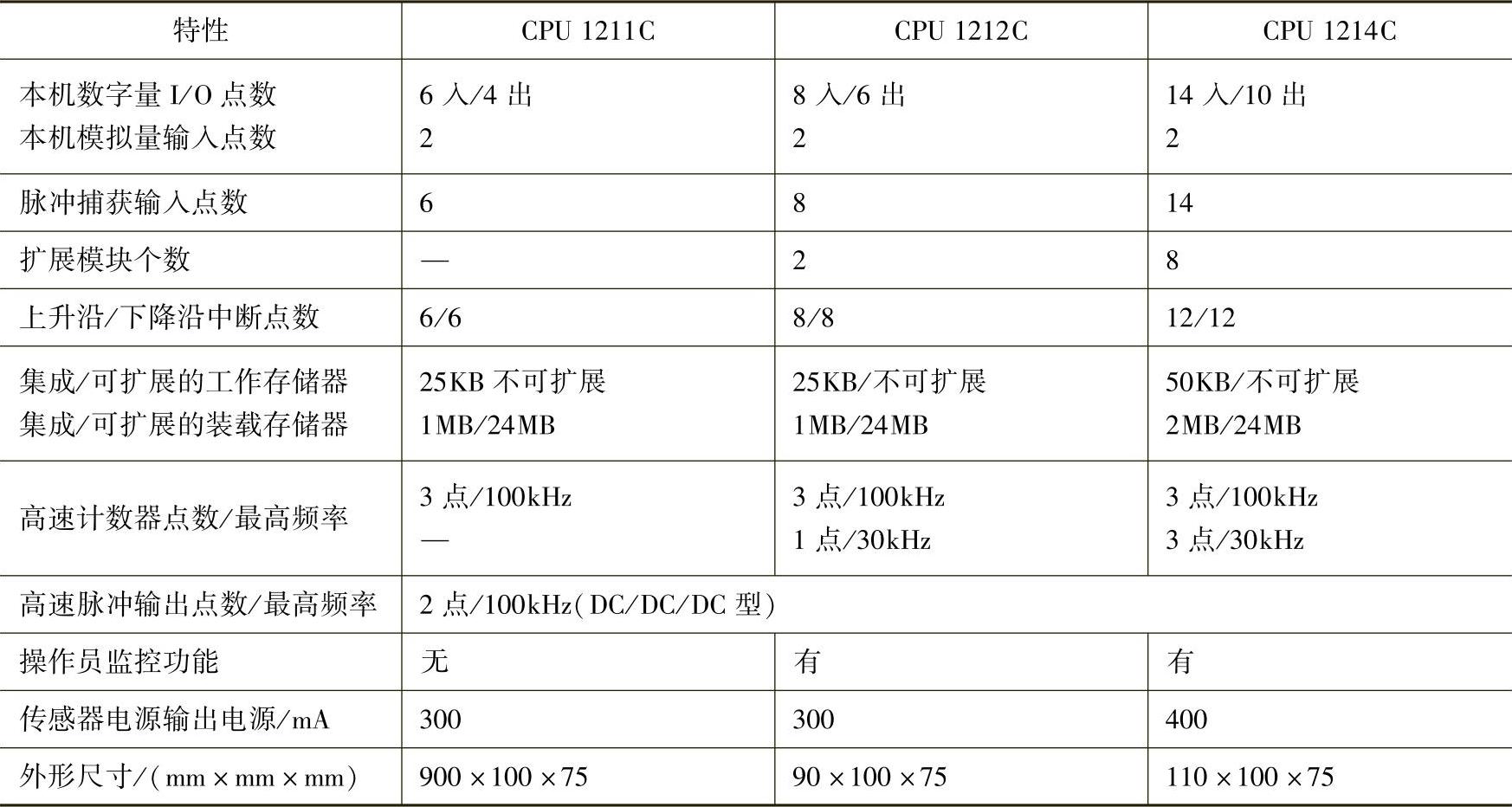
S7-1200现在有3种型号的CPU模块,在本书中统一简称为CPU,以常见的CPU1211C、CPU1212C及CPU1214C型为例其特性见表2-1。
表2-1 S7-1200 CPU技术特性
1.CPU的共性
1)集成的24V传感器/负载电源可供传感器和编码器使用,也可以用作输入回路的电源。
2)2点集成的模拟量输入(0~10V),输入电阻100kΩ,10位分辨率。
3)2点脉冲列输出(PTO)或脉宽调制(PWM)输出,最高频率100kHz。
4)每条位运算、字运算和浮点数数学运算指令的执行时间分别为0.1μs、12μs和18μs。
5)最多可以设置2048B有掉电保持功能的数据区(包括位存储器、功能块的局部变量和全局数据块中的变量)。通过可选的SIMATIC存储卡,可以方便地将程序传输到其他CPU。存储卡还可以用来存储各种文件或更新PLC系统的固件。
6)过程映像输入、输出各1024B。
数字量输入电路的电压额定值为DC 24V,输入电流为4mA。1状态允许的最小电压/电流为DC 15V/2.5mA,0状态允许的最大电压/电流为DC 5V/1mA。可组态输入延迟时间(0.2~12.8ms)和脉冲捕获功能。在过程输入信号的上升沿或下降沿可以产生快速响应的中断输入。
继电器输出的电压范围为DC 5~30V或AC 5~250V,最大电流为2A,白炽灯负载为DC30W或AC 200W。DC/DC型MOSF.ET的1状态最小输出电压为DC 20V,输出电流为0.5A。0状态最大输出电压为DC 0.1V,最大白炽灯负载为5W。
7)可以扩展3块通信模块和一块信号板,CPU可以用信号板扩展一路模拟量输出或高速数字量输入/输出。
8)时间延迟与循环中断,分辨率为1ms。
9)实时时钟的缓存时间典型值为10天,最小值为6天,25℃时的最大误差为60s/月。
10)带隔离的PROFINET以太网接口,可使用TCP/IP和ISO-on-TCP两种协议。支持S7通信,可以作服务器和客户机,传输速率为10Mbit/s、100 Mbit/s,可建立最多16个连接。自动检测传输速率,RJ-45连接器有自协商和自动交叉网线(Auto Cross Over)功能。后者是指用一条直通网线或者交叉网线都可以连接CPU和其他以太网设备或交换机。
11)用梯形图和功能块图这两种编程语言。
12)可选的SIMATIC存储卡扩展存储器的容量和更新PLC的固件。还可以用存储卡来方便地将程序传输到其他CPU。
13)参数自整定的PID控制器。
14)仿真器(小开关板)为数字量输入点提供输入信号来测试用户程序。(https://www.xing528.com)
2.CPU的技术规范
S7-1200的3种CPU有着不同电源电压和输入、输出电压的版本,详情见表2-2。
表2-2 S7-1200 CPU的版本

3.CPU集成的工艺功能
S7-1200集成了高速计数与频率测量、高速脉冲输出、PWM控制、运动控制和PID控制功能。
(1)高速计数器
S7-1200的CPU最多有6个高速计数器,用于对来自增量式编码器和其他设备的频率信号计数,或对过程事件进行高速计数。3点集成的高速计数器的最高频率为100kHz(单相)或80kHz(互差90°的AB相信号)。其余各点的最高频率为30kHz(单相)或20kHz(互差90°的AB相信号)。
(2)高速输出
S7-1200集成了两个100kHz的高速脉冲输出,组态为PTO时,它们提供最高频率为100kHz的50%占空比的高速脉冲输出,可以对步进电动机或伺服驱动器进行开环速度控制和定位控制,通过两个高速计数器对高速脉冲输出进行内部反馈。
组态为PWM输出时,将生成一个具有可变占空比、周期固定的输出信号,经滤波后,得到与占空比成正比的模拟量,可以用来控制电动机速度和阀门位置等。
(3)PLCopen运动功能块
S7-1200支持使用步进电动机和伺服驱动器进行开环速度控制和位置控制。通过一个轴工艺对象和STEP 7 Basic中通用的PLCopen运动功能块,就可以实现对该功能的组态。除了返回原点和点动功能以外,还支持绝对位置控制、相对位置控制和速度控制。
STEP 7 Basic中的驱动调试控制面板简化了步进电动机和伺服驱动器的起动和调试过程。它为单个运动轴提供了自动和手动控制,以及在线诊断信息。
(4)用于闭环控制的PID功能
S7-1200支持多达16个用于闭环过程控制的PID控制回路(S7-200只支持8个回路)。
这些控制回路可以通过一个PID控制器工艺对象和STEP 7 Basic中的编辑器轻松地进行组态。除此之外,S7-1200还支持PID参数自调整功能,可以自动计算增益、积分时间和微分时间的最佳调节值。
STEP 7 Basic中的PID调试控制面板简化了控制回路的调节过程,可以快速精确地调节PID控制回路。它除了提供自动调节和手动控制方式之外,还提供用于调节过程的趋势图。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。