



1.固定式简单辅助装置
这类装置结构简单,多用于手工操作和单件小批生产。其上平面要求较高,是组装和焊接结构及构件时的支承基准。图10-38a是由钢轨组成的台架,两钢轨之间可夹持螺栓头部以装夹构件。图10-38b为型钢与水泥组成的平台,其上部的导槽可以是长方形通孔。图10-38c为铸铁平台。图10-38d为型钢与木材组成的平台,也可将各种平台架高(一般高度>800mm)或用型钢做成条凳式的独立结构。根据构件大小由多条条凳组成工作平台。通常在这些简单辅助装置上迸行构件的组装、焊接、矫正或修理工作。

图10-38 各种工作平台的结构形式
a)钢轨台架 b)型钢与水泥平台 c)铸铁平台 d)型钢与木材平台 e)简易型钢台架 f)型钢大平台 g)条凳式型钢架
2.工件变位装置
这类装置有焊接变位机、焊接滚轮支架、焊接回转台、焊接翻转机及焊工升降台等。其作用是改变工件、焊机或焊工的位置以利于焊接。这类装置多数为电力驱动,用于单件小批生产时,也有用人力手工驱动的。
图10-39为手动焊接变位机,上部是卡盘,可安装工件,卡盘的中心轴与蜗轮蜗杆连接,摇动手柄时,卡盘可绕其中心轴回转。工作台的倾斜运动,则可转动手柄来驱动蜗轮蜗杆,经由齿轮与扇形齿轮,而扇形齿轮固定在卡盘回转系统水平支承轴的左端。扇形齿轮转动时,可使卡盘绕水平轴翻转135°,传动系统中的两对蜗轮蜗杆都是自锁的,以便保持工作位置。特别是翻转机构,为了确保安全,往往还须另加定位装置,以加强安全防护工作。图10-39d是图10-39a正在工作时的情况。图10-39b、c为另外两种形式。
这类手动式机械装置载重量不宜过大,一般都在500kg以下,尤其适用于小型工件的焊接。为了实现工件的全位置焊接或装配,需使装夹工件的工作台能够围绕两根互相垂直的枢轴回转,其中一个回转运动可以是往复摇摆,转动范围一般小于180°。
图10-40为1.5t座式焊接变位机。该变位机的工作台回转机构采用了少齿差轮减速,整体结构较为紧凑。变位机装有测速发电机和导电装置,有利于获得优良的焊缝成形,保证设备的精度和使用寿命。该变位机在倾斜机构上装有两个行程开关,当工作台超过倾斜极限位置时,可立即停车,以免发生事故。在该变位机上,无论是工作台的回转机构,还是倾斜机构,至少都有一级带传动和蜗杆传动,它们除起到减速的目的外,带传动还有减振和过载保护的作用,蜗杆传动还起到自锁的作用。这对于保证变位机运转速度的平稳和安全作业是有利的。该机可根据工件重心至工作台面的距离和工件重心至工作台轴线的偏心距来标定变位
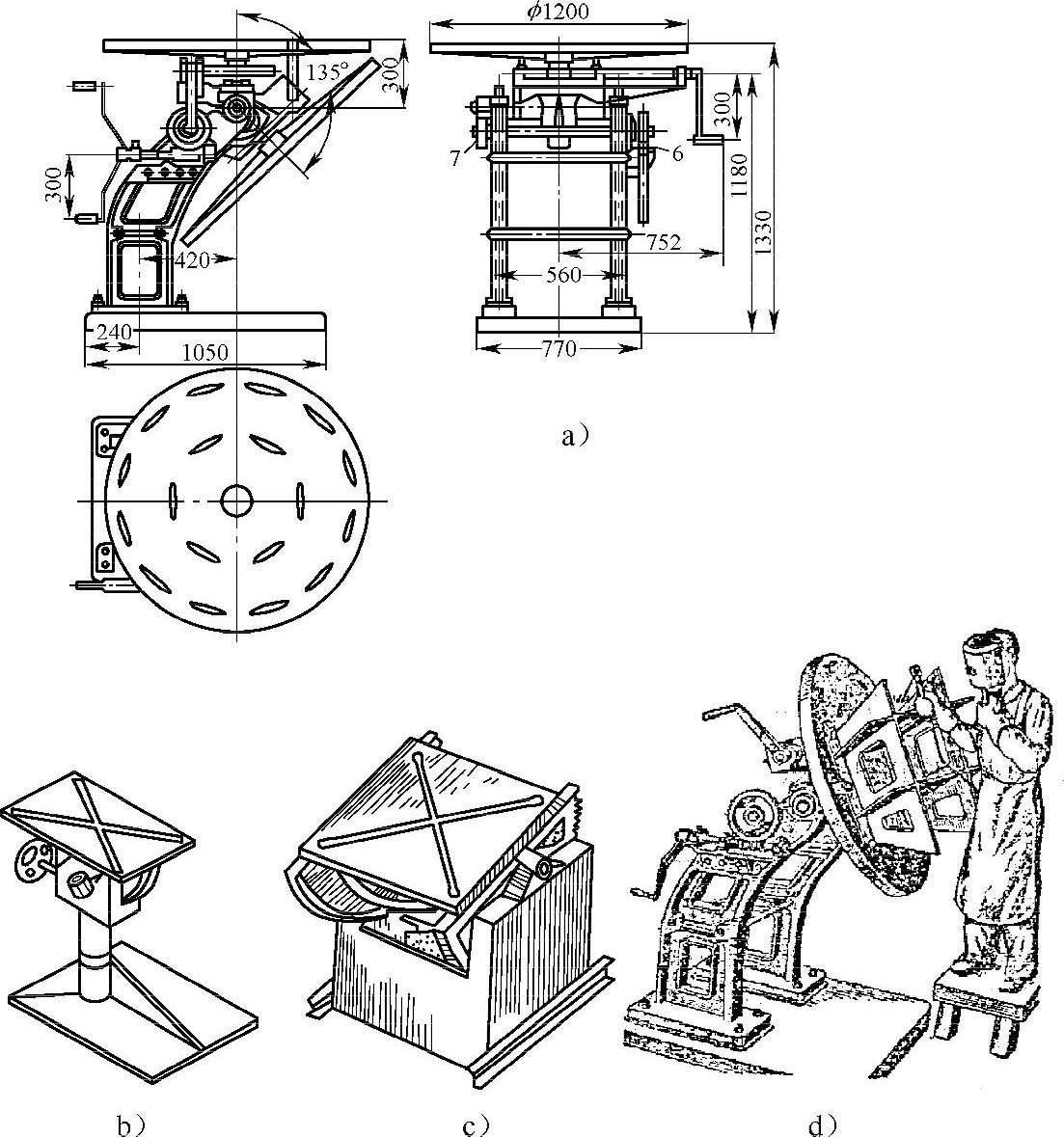
图10-39 手动焊接变位机
a)总体结构 b)轻便型 c)手动-电动两用型 d)变位机工作情况
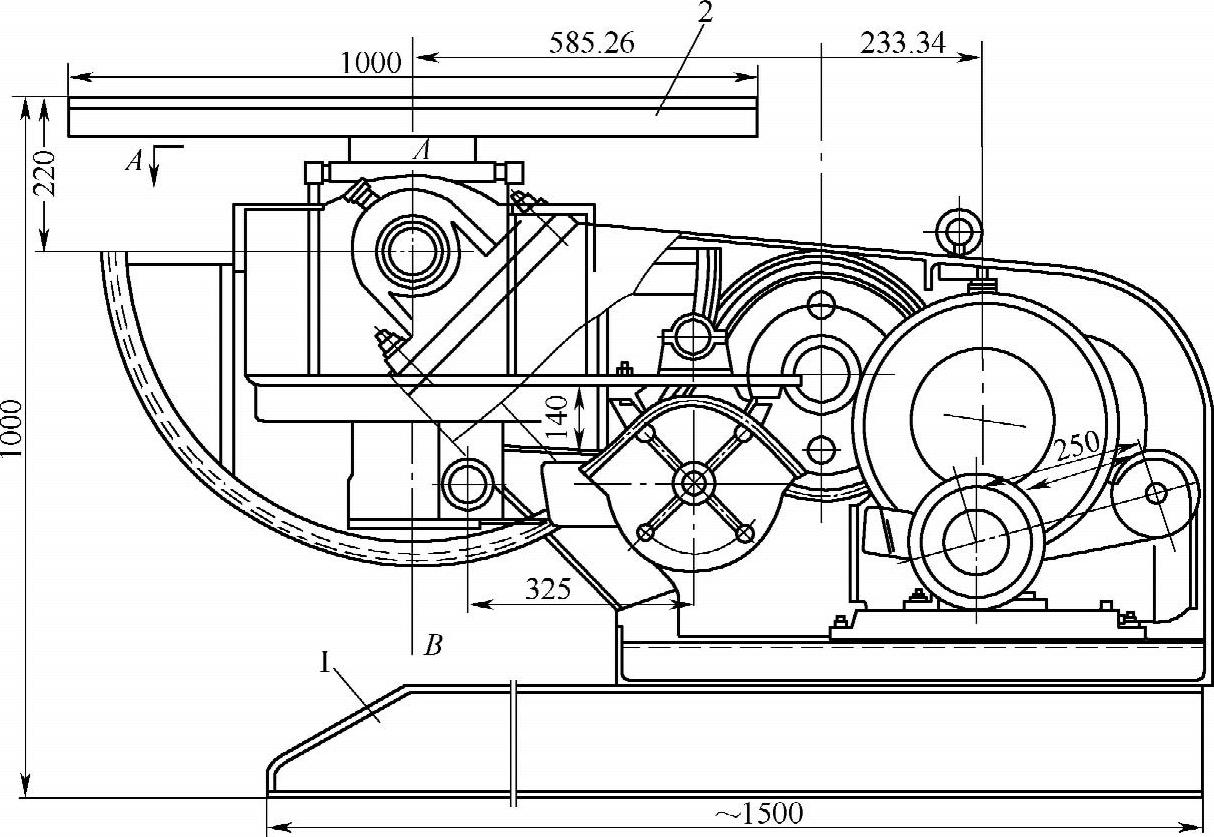
图10-40 1.5t座式焊接变位机
机的载重量。这种标定方式有利于合理地使用变位机,避免发生超载事故。在工作台上未安放工件时,其重心位于工作台倾斜轴线的一侧,安放工件后,综合重心将移近或移到倾斜轴线的另一侧,使工作台在有载或无载的情况下综合重心所形成的倾斜力矩变化不大。因此可减小倾斜机构的驱动功率,也有利于充分发挥电动机的效能。
图10-41为支承圆柱形工件常用的滚轮支架主动侧布置图。当工件较长时,可用两组或两组以上的滚轮支架组合以支承工件。每组滚轮的间距可用双头螺杆调节。
图10-42为支承重而大的圆柱工件的滚轮支架。当工件直径较小时,可将滚轮向两边翻转,使较低位置的滚轮升起并用以支托小直径工件。
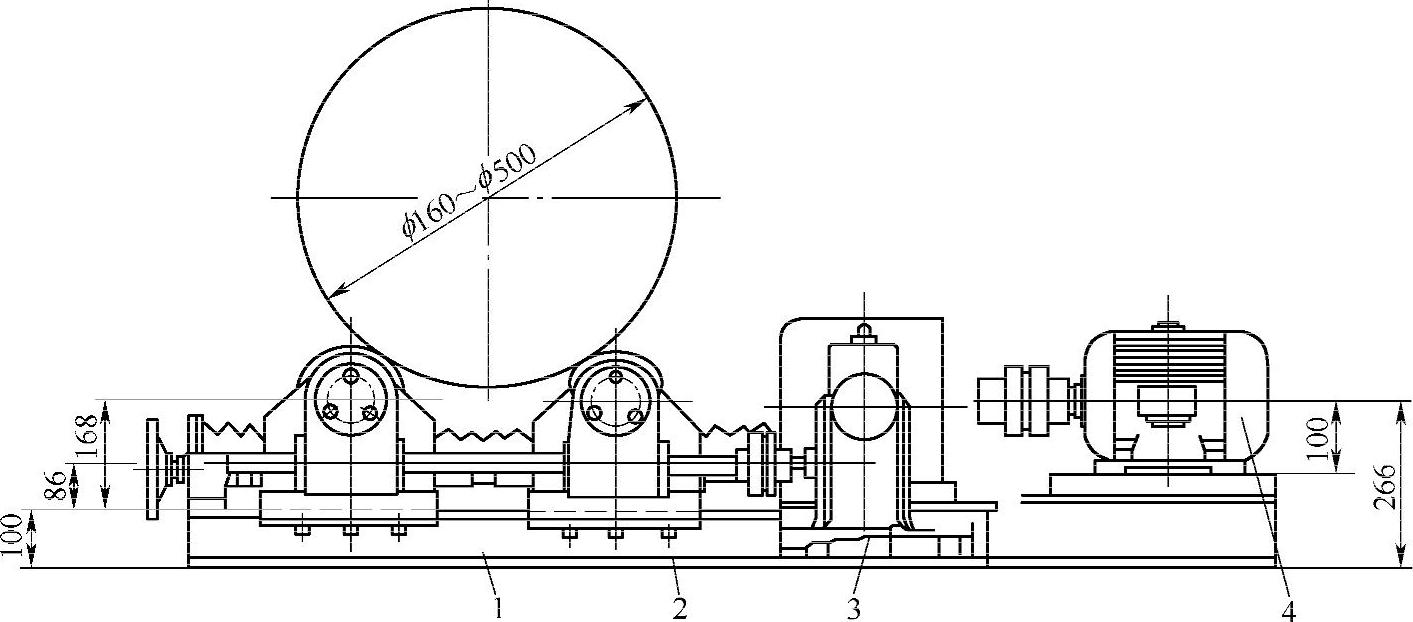
图10-41 4t焊接滚轮支架主动侧布置图
1—型钢支架 2—滚轮支撑 3—传动箱 4—电动机
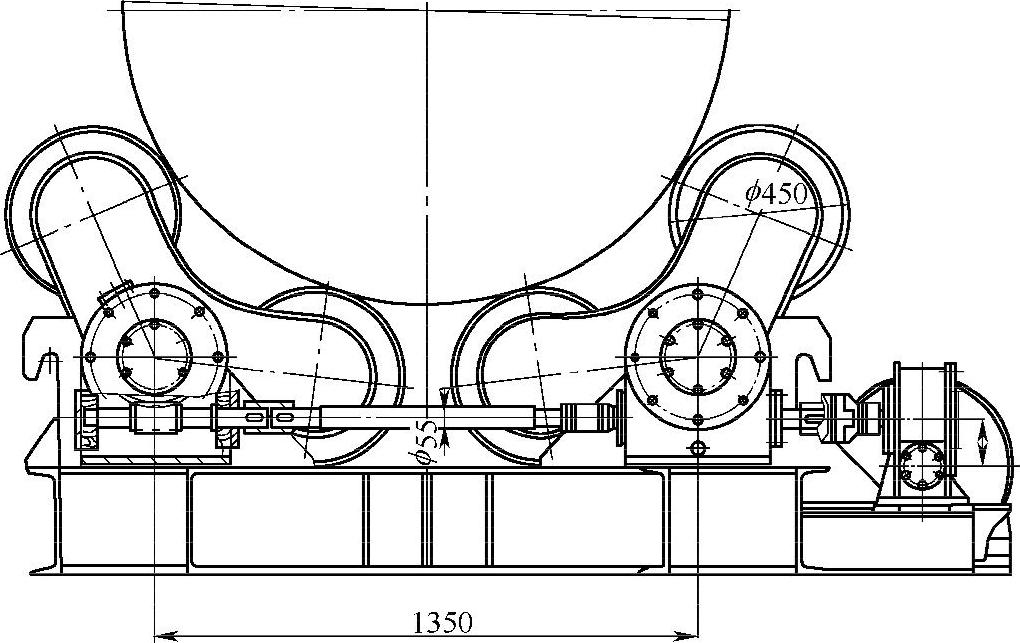
图10-42 圆柱焊件的滚轮支架
图10-43为滚轮支架工作时的全景。它实际上是三个系统的相互配合:系统I为滚轮支架使工件回转;系统Ⅱ是支承焊机、调节焊机的位置并与工件的位置相适应,以满足焊接要求;系统Ⅲ是焊机及操作工人。
滚轮支架的类型很多。当产品基本定型后,通常都将四个滚轮安装在一个底架上,这将使应用方便。(https://www.xing528.com)
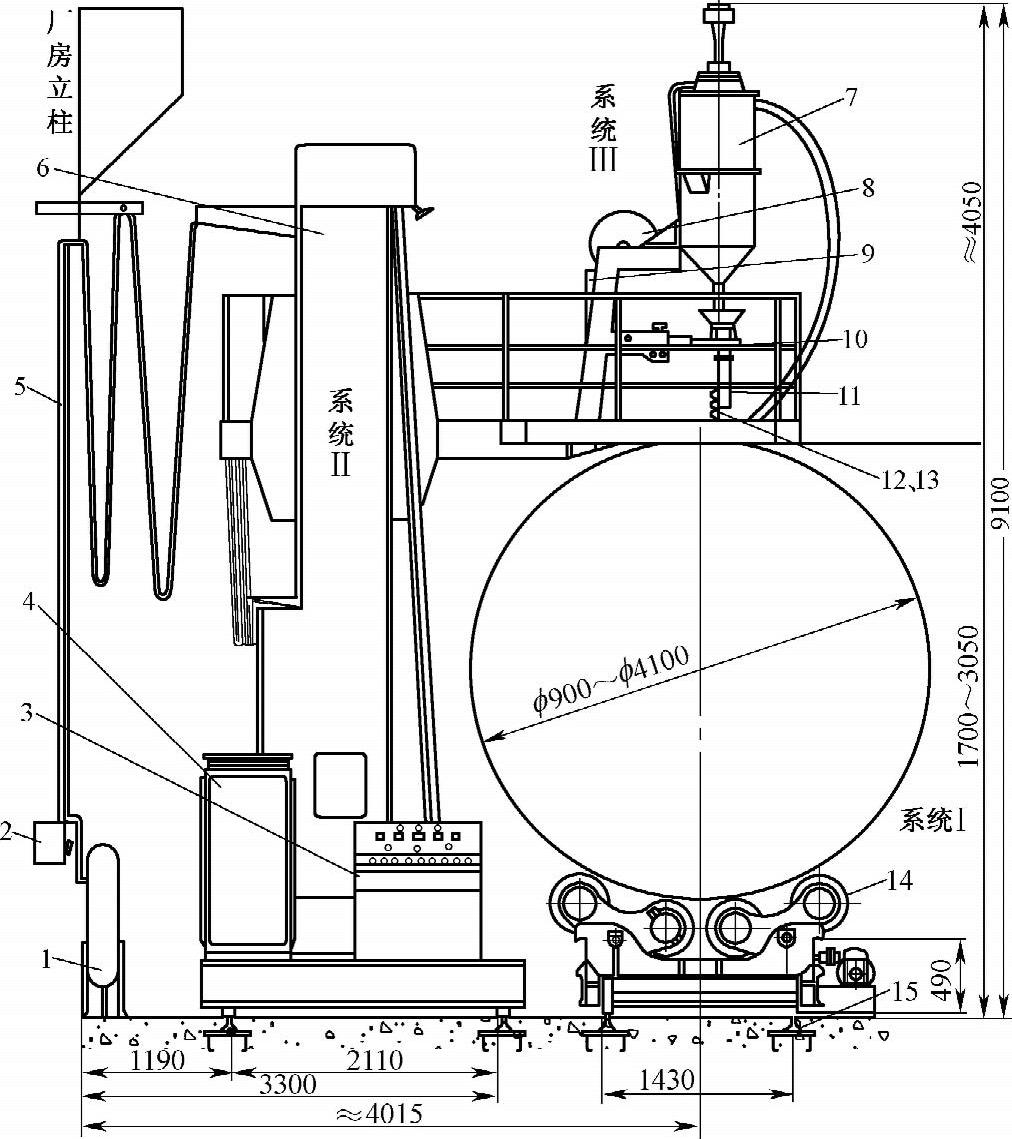
图10-43 滚轮支架工作时的全景
1—储气罐 2—闸刀开关 3—辅助操作台 4—焊接电源柜 5—电缆管路及装置 6—外环缝焊接架 7—焊剂回收装置 8—焊丝盘 9—操纵杆 10—焊头调节机构 11—焊丝传动机构 12—矫直辅送机构 13—焊头 14—自调式滚轮架 15—轨道
3.焊机变位机械装置
这类机械装置以改变焊机所处位置为主要任务。为了适应在各种情况下的焊接需要,其类型与结构也是多种多样的。其共同特征是:具有可以升降和水平伸缩的横臂或平台,立柱回转,台车可以移动等多种运动,也有不带台车而仅使平台或横臂绕立柱回转并沿之升降的。
图10-44所示的伸臂式焊机变位装置是目前国内外常用的一种机械装置。其横臂伸缩由齿轮齿条带动,横臂升降则由螺母螺杆实现。立柱连同底座可沿轨道移动。横臂端部安放焊机和工人坐椅。该装置与滚轮支架等配合使用时,可焊接各种直缝、环缝、螺旋焊缝与平面、曲面的表面堆焊等,适应性很广。
伸臂式焊接操作机一般都具有横臂升降与伸缩、立柱回转、台车移动四个运动。能以规定的焊速沿规定的轨迹移动焊机,能将焊机送到并保持在待焊位置上。
伸臂式的焊接操作机,结构轻巧、移动灵活,可远距离控制,能在多种工位上迸行内外环缝,内外纵缝的焊接,也可迸行工件表面的堆焊。若与焊接变位机等配合,可迸行螺旋焊缝及其他曲线焊缝的焊接。
为保证焊接质量,要求立柱回转、横臂伸缩、台车运行均应平稳,不能有颤动、冲击等现象。因此在迸行设计时,结构的截面形式、材料以及加工精度的选取甚为重要。此外,为弥补结构设计的不足,焊机电流控制系统也应做适当的改迸,即在施焊过程中,一旦发生颤动和速度不均等现象时,焊接规范应立即做相应的改变,以迸行补偿。
该焊接操作机横臂伸缩和立柱回转的速度设为焊接速度,其余为空程速度。而有的伸臂式操作机,除横臂升降速度外,均为焊接速度。此外,为便于焊工操作,有的伸臂式操作机在横臂一端放置焊机的地方设有坐椅。
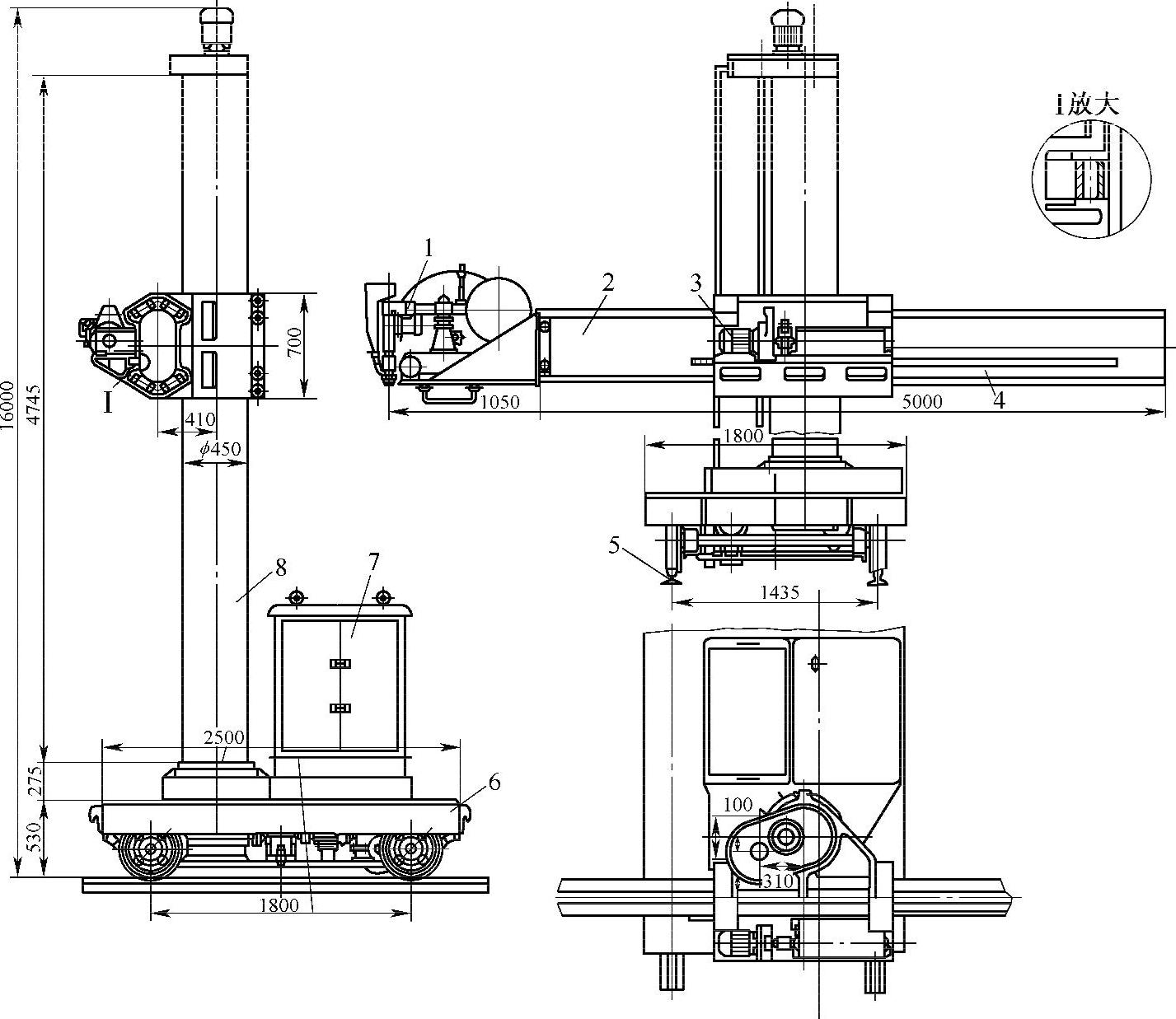
图10-44 伸缩臂式焊接操作机
1—自动焊机 2—横臂 3—横臂迸给机构 4—齿条 5—钢轨 6—行走台车 7—焊接电源及控制箱 8—立柱总成
4.焊工变位机械装置
这类装置的主要作用是在焊接高大结构或在工地上施工时,将焊工连同焊机或切割设备输送到作业位置。这类装置除有上升机构外,一般都可在地面上任意移动或沿轨道定向行走。
图10-45与图10-46所示是这类机械中的两种结构,前者为起重式焊工升降台,后者为立柱式焊工升降台,其立柱升降为机械传动。电动机经带传动和蜗杆减速器减速后,通过齿轮齿条机构带动立柱升降。此外,工作台通过手摇齿轮齿条机构可调节其伸出长度。后者的性能远不如前者方便灵活,它适于在固定工位上使用,其承重能力比前者大,而巨安全可靠。
这类机械除用于焊接外,尚可迸行切割、安装、检验和维修等。

图10-45 起重式焊工升降台
1,2—埋弧焊机 3—立架 4—导轨 5—控制箱 6—底架 7—活塞油缸 8—活动臂
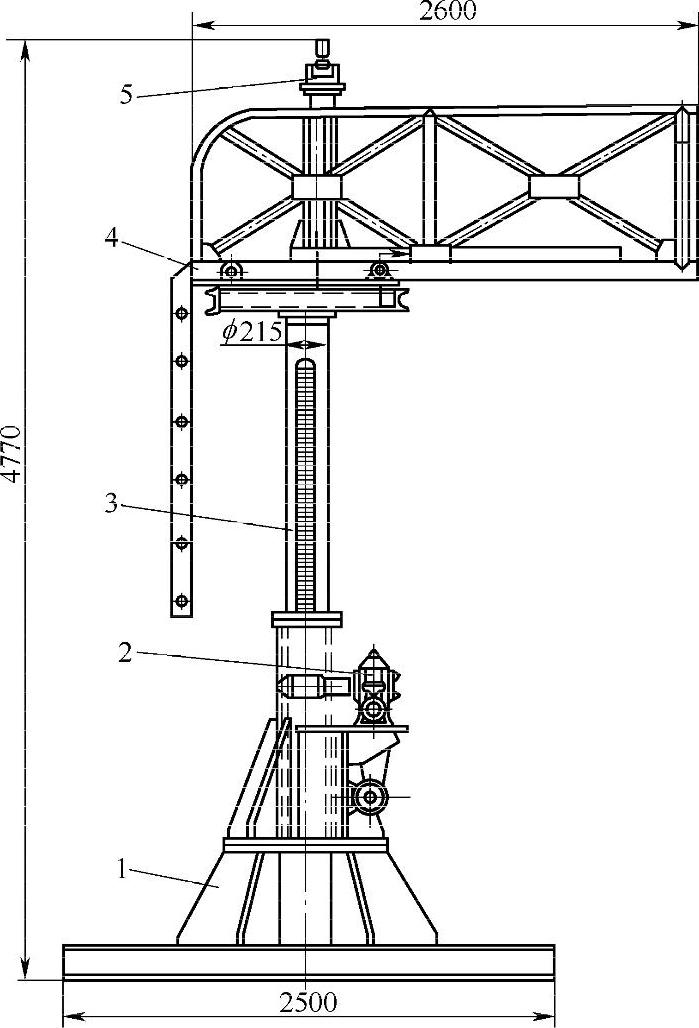
图10-46 立柱式焊工升降台
1—底座 2—升降机构 3—立柱 4—工作台 5—手摇工作台伸缩机构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。