



科学家研制机器人,实际上是仿照人类去塑造机器人,首先要使机器人具有人类的某些功能、某些行为,能够胜任人类希冀的某种任务,其最高标准应为类人型智能机器人。因此,研讨机器人的基本结构,可与人体的基本结构相对照来进行。
1.人的基本结构
在万物众生中,人类的形貌是最完美的:整个躯体比例匀称、结构巧妙;有一个生动的面孔、能思维的头脑和灵活的四肢;在胸腹腔内有五脏六腑,组织结构极为复杂、严密,这就是万物之灵的人类。
根据人体解剖学,整个人体共分为九个系统,即:
1)由骨、骨连接和肌肉组成的运动系统。全身共有大小不同、形状各异的骨头206块,构成了骨骼,它是人体的支架;有600余块肌肉,约占人体重量的40%,它是人体运动的动力器官。
2)由消化道和消化腺组成的消化系统。其主要功能是对食物进行消化和吸收,以供给人们在生长、发育和活动中所需要的营养物质。简而言之,该系统是人体的能源供应部。
3)由呼吸道和肺组成的呼吸系统。呼吸是生命活动的重要标志,人活着就要不停地从外界吸进氧气,同时呼出二氧化碳。
4)由肾、输尿管、膀胱和尿道组成的泌尿系统,其主要功能是以尿的形式排出一些有害物质。
5)由男、女生殖器官组成的生殖系统,其主要功能是繁衍下一代。
6)由心脏、血管和淋巴系统组成的循环系统。心脏是人体的动力器官,由它有节律地跳动,推动血液在血管中循环流动,以保证机体营养的需要,维持人体新陈代谢的正常运行。
7)由脑、脊髓和周围神经组成的神经系统。它在人体内处于主导地位,由它控制和管理着人体的各种生命活动。
8)由皮肤、眼睛和耳朵(还有鼻、口)组成的感觉器官。其主要功能是接受外界刺激(信息)发生兴奋,然后由神经传导到相应的神经中枢,从而产生感觉。皮肤有温、痛、触觉的感受作用,眼睛是视觉器官,耳朵为听觉器官。另外,口腔及舌具有味觉功能,鼻子具有嗅觉功能。
9)由无管腺体组成的内分泌系统。内分泌腺没有导管,散布于人体各个部位,其主要功能是可分泌出“激素”这种极为重要的物质,对人体的代谢、生长、发育和繁殖等起着重要的调节作用。
人体的组织结构是一个非常严密、非常复杂的统一体,细胞是构成人体最基本的形态结构单位和机能单位。各系统之间互相关联、影响和依存,在神经系统统一支配下,各系统协调一致,共同完成人的生命活动和功能活动。
2.机器人的结构
机器人的结构(见图1-1和图1-2)通常由四大部分组成,即执行机构、驱动系统、控制系统和智能系统。
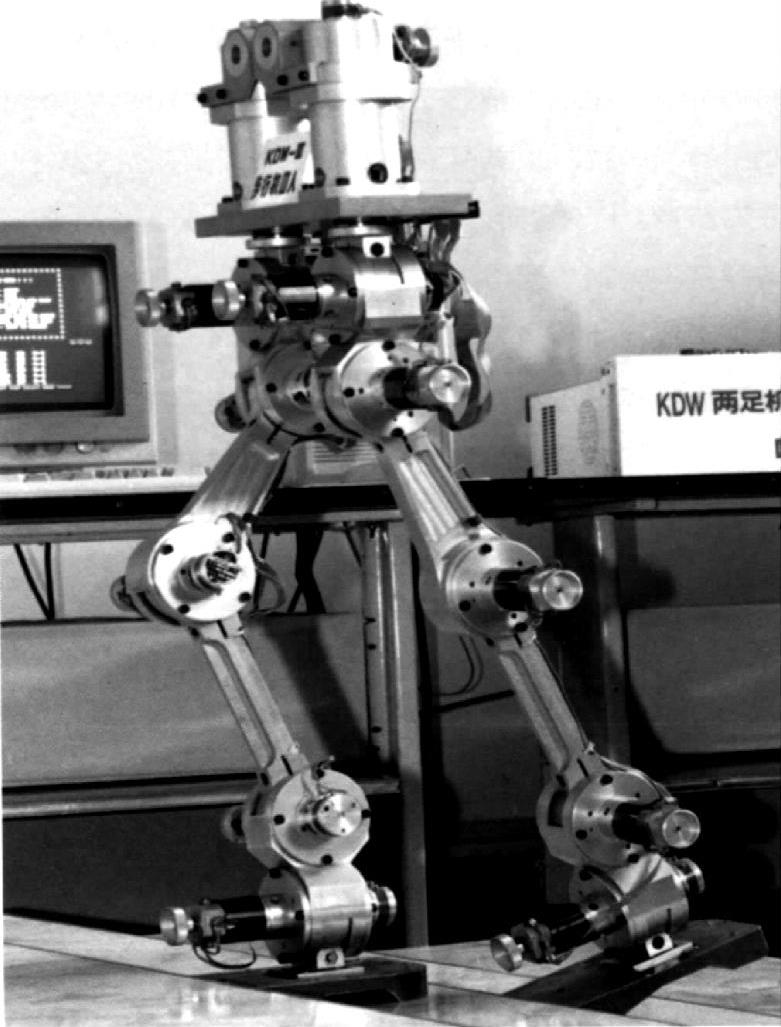
图1-1 步行拟人机器人

图1-2 工业机器人
(1)机器人的执行机构 众所周知,人的功能活动(劳动)分为脑力劳动和体力劳动两种,两者往往又不能截然分开。从执行器官讲,就是在大脑支配下的嘴巴和四肢。单从体力劳动来讲,可以靠脚力、肩扛,但最主要的是人的手臂,而手的动作离不开胳臂、腰身的支持与配合。手部的动作和其他部位的动作是靠肌肉收缩和张弛,并由骨骼作为杠杆支持而完成的。
从图1-1和图1-2可知,机器人的执行机构包括手部、腕部、腰部和基座,它与人身结构基本上相对应,其中基座相对于人的下肢。机器人的构造材料,至今仍是使用无生命的金属和非金属材料,用这些材料加工成各种机械零件和构件,其中有仿人形的“可动关节”。机器人的关节(相当于机构中的“运动副”)有滑动关节、回转关节、圆柱关节和球关节等类型,在何部位采用何种关节,则由要求它做何种运动而决定。机器人的关节保证了机器人各部位的可动性。
1)机器人的手部,又称末端执行机构,它是工业机器人和多数服务型机器人直接从事工作的部分。根据工作性质(机器人的类型),其手部可以设计成夹持型的夹爪,用以夹持东西;也可以是某种工具,如焊枪、喷嘴等;也可以是非夹持类的,如真空吸盘、电磁吸盘等。在仿人形机器人中,手部可能是仿人形多指手。
2)机器人的腕部,相当于人的手腕,它上与臂部相连,下与手部相接,一般有3个自由度,以带动手部现实必要的姿态。
3)机器人的臂部,相当于人的胳膊,下连手腕,上接腰身(人的胳膊上接肩膀),一般由小臂和大臂组成,通常是带动腕部做平面运动。
4)机器人的腰部,相当于人的躯干,是连接臂部和基座的回转部件,由于它的回转运动和臂部的平面运动,就可以使腕部做空间运动。
5)机器人的基座,是整个机器人的支撑部件,它相当于人的两条腿,要具备足够的稳定性和刚度,有固定式和移动式两种类型。在移动式的类型中,有轮式、履带式和仿人形机器人的步行式等。(https://www.xing528.com)
(2)机器人的驱动—传动系统 机器人的驱动—传动系统是将能源传送到执行机构的装置。其中,驱动器有电动机(直流伺服电动机、交流伺服电动机和步进电动机)、气动和液动装置(压力泵及相应控制阀、管路);而传动机构,最常用的有谐波减速器、滚珠丝杠、链、带及齿轮等传动系统。
机器人的能源按其工作介质,可分为气动、液动、电动和混合式四大类,在混合式中,有气—电混合式和液—电混合式。液压驱动就是利用液压泵对液体加压,使其具有高压势能,然后通过分流阀(伺服阀)推动执行机构进行动作,从而达到将液体的压力势能转换成做功的机械能。液压驱动的最大特点就是动力比较大、力和力矩惯性比大、反应快,比较容易实现直接驱动,特别适用于要求承载能力和惯性大的场合。其缺点是多了一套液压系统,对液压元件要求高,否则容易造成液体渗漏,噪声较大,对环境有一定的污染。
气压驱动的基本原理与液压驱动的相似。其优点是工质(空气)来源方便、动作迅速、结构简单、造价低廉、维修方便,其缺点是不易进行速度控制、气压不宜太高、负载能力较低等。
电动驱动是当前机器人使用最多的一种驱动方式,其优点是电源方便,响应快,信息传递、检测、处理都很方便,驱动能力较大;其缺点是因为电动机转速较高,必须采用减速机构将其转速降低,从而增加了结构的复杂性。目前,一种不需要减速机构可以直接用于驱动、具有大转矩的低速电动机已经出现。这种电动机可使机构简化,同时可提高控制精度。
机器人的驱动系统相当于人的消化系统和循环系统,是保证机器人运行的能量供应。
(3)机器人的控制系统 机器人的控制系统是由控制计算机及相应的控制软件和伺服控制器组成,它相当于人的神经系统,是机器人的指挥系统,对其执行机构发出如何动作的命令。不同发展阶段的机器人和不同功能的机器人,所采取的控制方式和水平是不相同的,例如在工业机器人中,有点位控制和连续控制两种方式。最新和最先进的控制是智能控制技术。
(4)机器人的智能系统 所谓智能,简而言之,是指人的智慧和能力,就是人在各种复杂条件下,为了达到某一目的而能够作出正确的决断,并且成功实施。在机器人控制技术方面,科学家一直企图将人的智能引入机器人控制系统,以形成其智能控制,达到在没有人的干预下,机器人能实现自主控制的目的。
机器人智能系统由两部分组成:感知系统和分析-决策智能系统。
1)感知系统。感知系统主要靠具有感知不同信息的传感器构成,属于硬件部分,包括视觉、听觉、触觉以及味觉、嗅觉等传感器。在视觉方面,目前多是利用摄像机作为视觉传感器,它与计算机相结合,并采用电视技术,使机器人具有视觉功能,可以“看到”外界的景物,经过计算机对图像的处理,就可对机器人下达如何动作的命令。这类视觉传感器在工业机器人中多用于识别、监视和检测。
2001年2月26日,《解放日报》报道了美国麻省理工学院(MIT)科学家布雷吉尔女士发明了一个叫“基斯梅特”的婴儿机器人,它有一个大脑袋,身体矮小,有一双大的不成比例的蓝眼睛,两只粉红色的耳朵,一张用橡胶做成的大嘴巴,具有婴儿的视力和喜、怒、哀、乐的表情,令人爱怜。它的眼睛是由两台微型电子感应摄像机构成的,最佳聚焦位置为0.6m,与婴儿的视力大致相同。
机器人的听觉功能就是指机器人能够接受人的语音信息,经过语音识别、语音处理、语句分析和语义分析,最后做出正确对答,即所谓的“语音识别”。语音识别系统一般是由传声器、语音预处理器、计算机及专用软件所组成。
ASIMO是本田公司开发的目前世界上最先进的类人型机器人(见图1-3)。ASIMO名字象征着Advanced(新纪元)、Step in(进入)、Innovative(创新)、Mobility(移动工具)的含义。本田希望能创造出一个可以在人的生活空间里自由移动、具有人一样的极高移动能力和高智能的类人型机器人,它能够在未来社会中与人们和谐共存,为人们提供服务,而ASIMO就是这个未来梦想的结晶。ASIMO可以行走自如,进行诸如“8”字形行走、上下台阶、弯腰等各项“复杂”动作;并可以随着音乐翩翩起舞,并能以每小时6km的速度奔跑;ASIMO还能与人类互动协作进行握手、猜拳等动作,似乎科幻电影中的情节变成了现实。

图1-3 类人型机器人ASIMO
图1-4是哈尔滨工业大学机器人技术有限公司研制的智能迎宾导游机器人,其外形与功能已十分像人类。它的手臂、头部、眼睛、嘴巴、腰部会随着优美的乐曲,做出相应的动作,它还具有语音功能,会唱歌、讲解、背诵唐诗、致迎宾词等,可广泛应用于展馆、游乐场、酒店、宾馆、办公楼等公共场所。
目前,机器人的语言是一种“合成语言”,与人类的语言有很大区别。其语音尚没有节奏,没有抑、扬、顿、挫。
机器人的触觉传感器多为微动开关、导电橡胶或触针等,利用它对触点接触与否所形成电信号的“通”与“断”,传送到控制系统,从而实现对机器人执行机构的命令。
当要求机器人不得接触某一对象而又要实施检测时,就需要机器人安装非接触式传感器。目前,这类传感器有电磁涡流式、光学式和超声波式等类型。
当要求机器人的末端执行机构(如灵巧手)具有适度的力量,如握力、拧紧力或压力时,就需要有力学传感器。力学传感器种类较多,常用的是电阻应变式传感器。
人类的嗅觉是通过鼻黏膜感受气味的刺激,由嗅觉神经传递给大脑,再由大脑将信息与记忆的气味信息加以比较,从而判定气味的种类及来源。科学家研制出一种能辨别气味的电子装置,叫做“电子鼻”,它包括气味传感器、气味存储器和具有识别处理有关数据的计算机。其中,气味(即嗅觉)传感器就相当于人类的“鼻黏膜”。但是,一种嗅觉传感器只能对一类气味进行识别,所以,必须研制出对复合气体有识别能力的“电子鼻”。据报道,美国已研制成用20支相关的传感器和计算机相连的“电子鼻”,以计算机存储的气味记录与传感器信号加以比较判定,并可在显示器上显示。人的鼻子对气味的判定具有多种性,但因易疲劳和受病痛的影响,因此不十分可靠,而“电子鼻”胜过人类。
2)机器人的分析—决策智能系统。该系统主要是靠计算机专用或通用软件来完成,例如专家咨询系统。
目前,一些发达国家都在加紧新一代机器人的研制工作。例如日本住友公司研制出具有视觉、听觉、触觉、味觉和嗅觉5种感知功能的机器人,它内部装置了14种微处理器,有很强的记忆功能,一次接触就可以记住人的声音和面貌。再如美国斯坦福大学研制成功的机器人警察“罗伯特警长”,当它发现窃贼时,会立即发出报警信号,并且穷追不舍,一旦抓住了窃贼,它就立即向窃贼脸上喷出麻醉气体,使之昏迷。
综上所述,与人类相比,目前机器人没有呼吸系统、生殖系统、类人的肌肉和皮肤,其余从功能方面讲,都可以互相对应起来。据机器人专家预测,未来的机器人可能会与生物人难以区别。
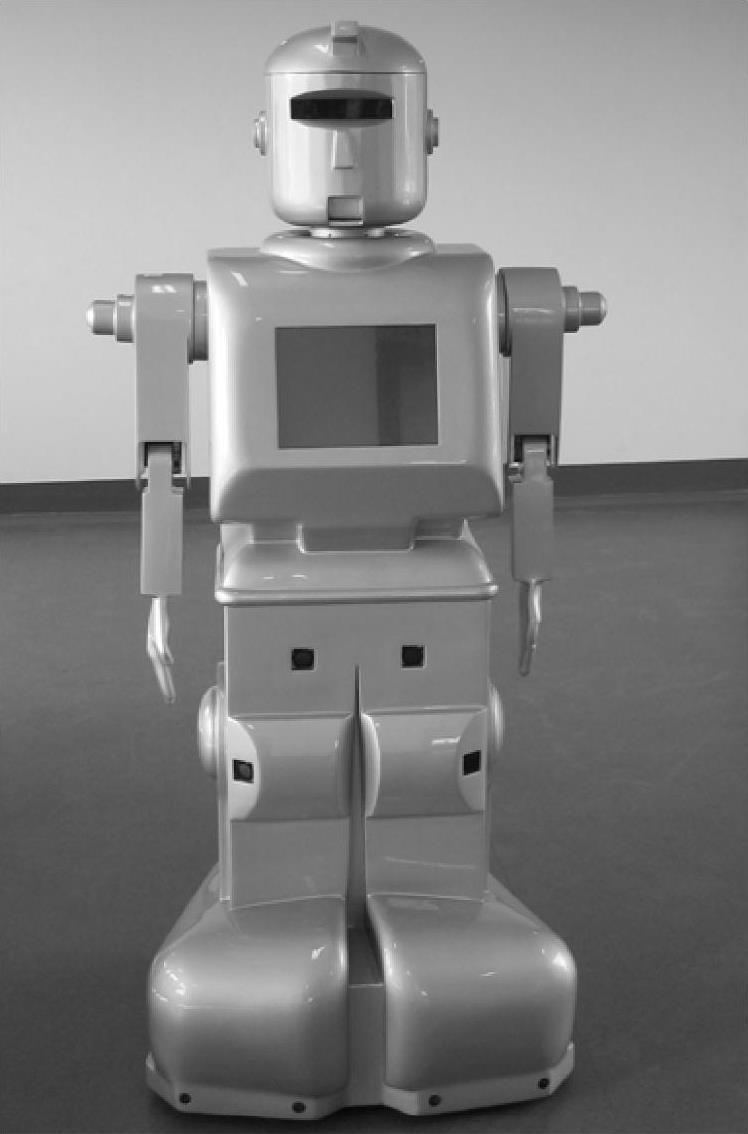
图1-4 智能迎宾导游机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。