



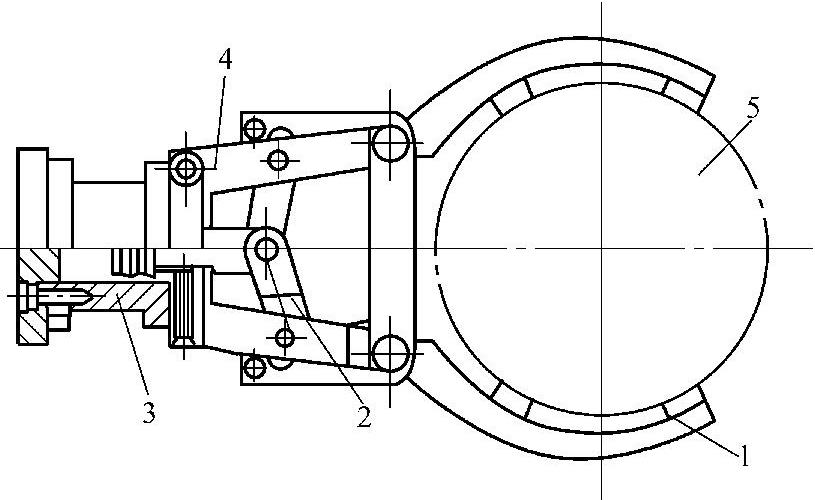
图3-1 夹钳式手部的组成
1—手指 2—传动机构 3—驱动装置 4—支架 5—工件
夹钳式取料手由手指(手爪)、驱动机构、传动机构及连接与支承元件组成,如图3-1所示。它通过手指的开、合实现对物体的夹持。
1.手指
手指是直接与工件接触的部件。手部松开和夹紧工件,就是通过手指的张开与闭合来实现的。机器人的手部一般有两个手指,也有三个、四个或五个手指,其结构形式常取决于被夹持工件的形状和特性。
指端是手指上直接与工件接触的部位,其结构形状取决于工件形状。常用的手指有以下类型:
①V形指:如图3-2a所示,它适用于夹持圆柱形工件,特点是夹紧平稳可靠、夹持误差小;也可以用两个滚轮代替V形体的两个工作面,如图3-2b所示,它能快速夹持旋转中的圆柱体。图3-2c所示为可浮动的V形指,有自定位能力,与工件接触好,但浮动件是机构中的不稳定因素,在夹紧时和运动中受到的外力必须有固定支承来承受,应设计成可自锁的浮动件。
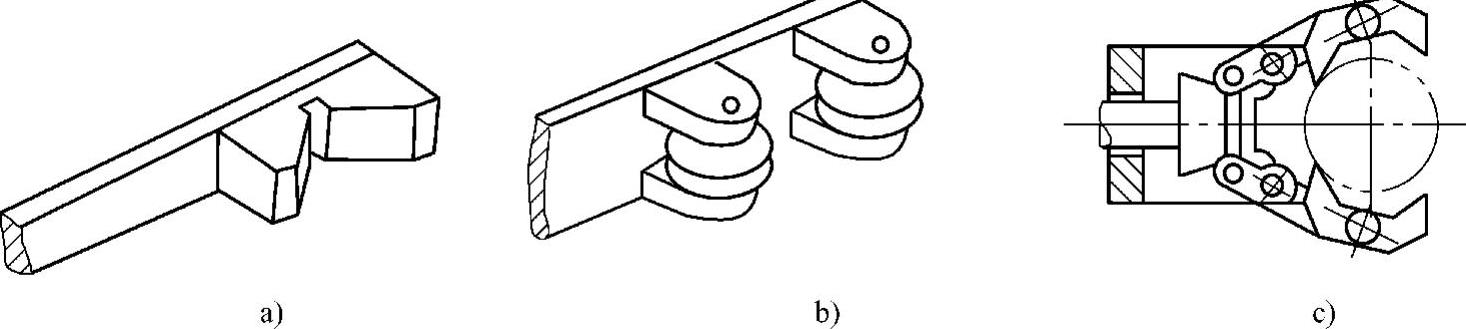
图3-2 V形指端形状
a)固定V形 b)滚柱V形 c)自定位式V形
②平面指:如图3-3a所示,一般用于夹持方形工件(具有两个平行平面)、方形板或细小棒料。
③尖指和长指:如图3-3b所示,一般用于夹持小型或柔性工件;尖指用于夹持位于狭窄工作场地的细小工件,以避免和周围障碍物相碰;长指用于夹持炽热的工件,以避免热辐射对手部传动机构的影响。
④特形指:如图3-3c所示,用于夹持形状不规则的工件。应设计出与工件形状相适应的专用特形手指,才能夹持工件。
指面的形状常有光滑指面、齿形指面和柔性指面等。光滑指面平整光滑,用来夹持已加工表面,避免已加工表面受损;齿形指面的指面刻有齿纹,可增加夹持工件的摩擦力,以确保夹紧牢靠,多用来夹持表面粗糙的毛坯或半成品;柔性指面内镶橡胶、泡沫、石棉等物,有增加摩擦力、保护工件表面、隔热等作用,一般用于夹持已加工表面、炽热件,也适于夹持薄壁件和脆性工件。
2.传动机构
传动机构是向手指传递运动和动力,以实现夹紧和松开动作的机构。该机构根据手指开合的动作特点,可分为回转型和平移型,回转型又分为单支点回转和多支点回转。根据手爪夹紧是摆动还是平动,回转型还可分为摆动回转型和平动回转型。
(1)回转型传动机构 夹钳式手部中用得较多的是回转型手部,其手指就是一对杠杆,一般再与斜楔、滑槽、连杆、齿轮、蜗轮蜗杆或螺杆等机构组成复合式杠杆传动机构,用以改变传动比和运动方向等。
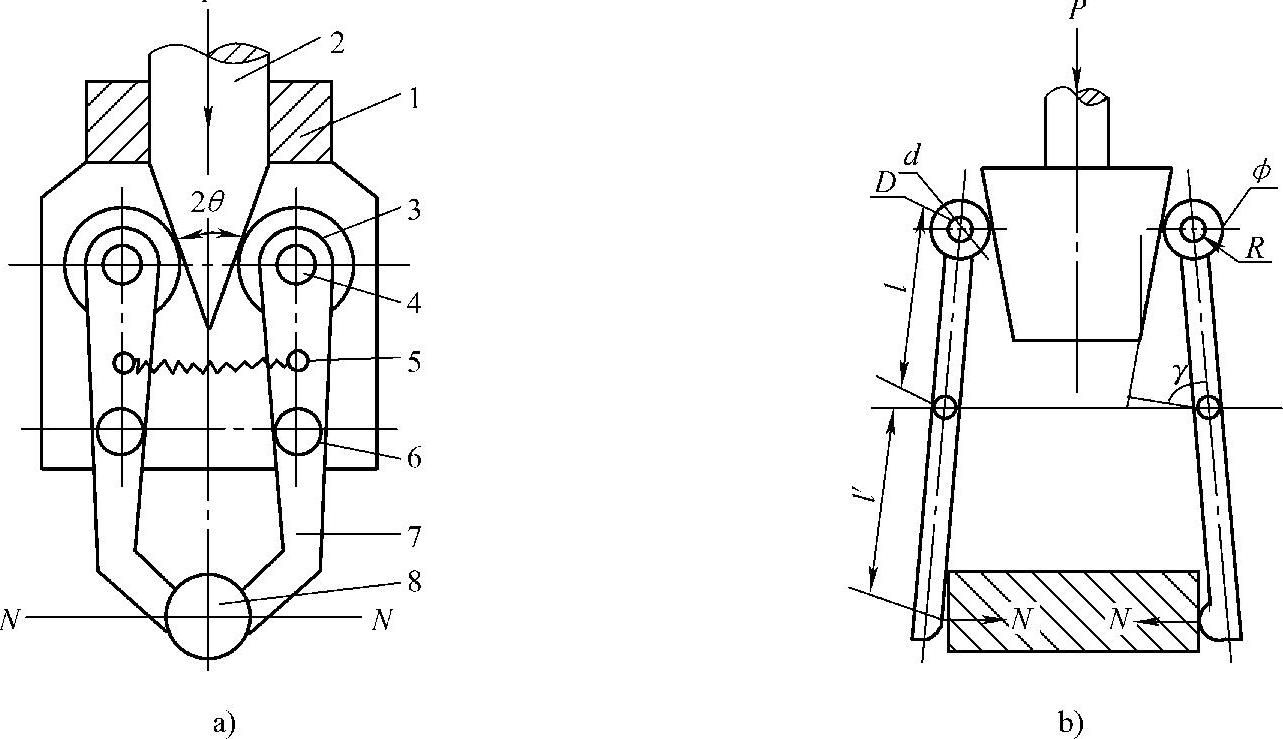
图3-4a所示为单作用斜楔式回转型手部结构简图。斜楔向下运动,克服弹簧拉力,使杠杆手指装着滚子的一端向外撑开,从而夹紧工件;斜楔向上运动,则在弹簧拉力作用下使手指松开。手指与斜楔通过滚子接触,可以减少摩擦力,提高机械效率。有时为了简化,也可让手指与斜楔直接接触,如图3-4b所示。
图3-5所示为滑槽式杠杆回转型手部简图。杠杆形手指4的一端装有V形指5,另一端则

图3-3 夹钳式手的指端
a)平面指 b)尖指和长指 c)特形指
 (https://www.xing528.com)
(https://www.xing528.com)
图3-4 斜楔杠杆式手部
a)单作用斜楔式回转型手部 b)简化型斜楔式回转型手部 1—壳体 2—斜楔驱动杆 3—滚子 4—圆柱销 5—拉簧 6—铰销 7—手指 8—工件
开有长滑槽。驱动杆1上的圆柱销2套在滑槽内,当驱动连杆同圆柱销一起作往复运动时,即可拨动两个手指各绕其支点(铰销3)作相对回转运动,从而实现手指的夹紧与松开动作。
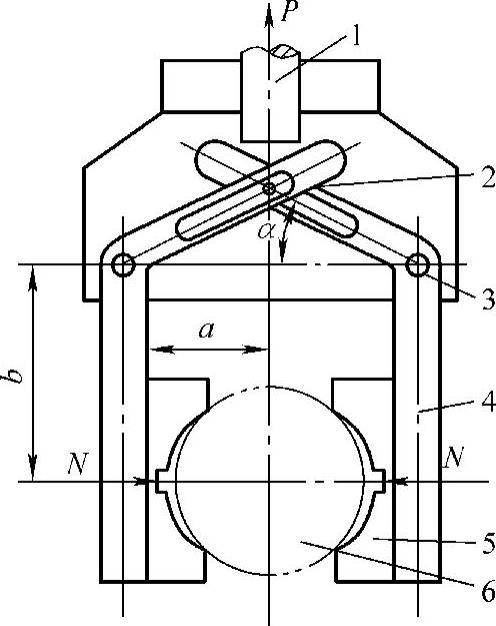
图3-5 滑槽式杠杆回转型手部
1—驱动杆 2—圆柱销 3—铰销 4—手指 5—V形指 6—工件
图3-6所示为双支点连杆式手部的简图。驱动杆2末端与连杆4由铰销3铰接,当驱动杆2作直线往复运动时,则通过连杆推动两杆手指各绕支点作回转运动,从而使得手指松开或闭合。
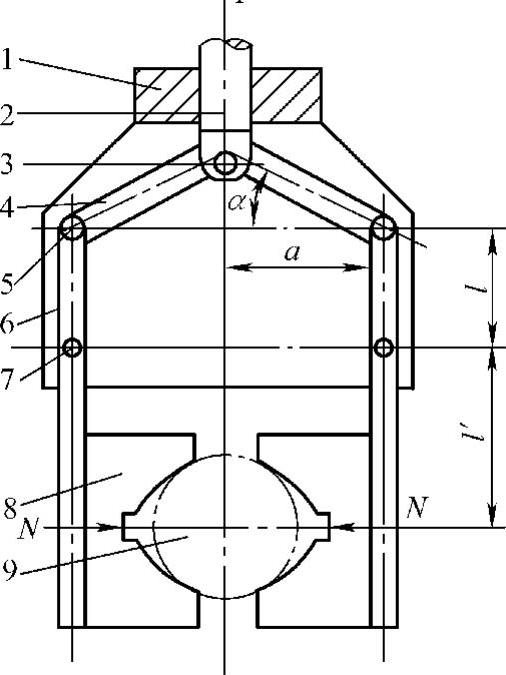
图3-6 双支点连杆式手部
1—壳体 2—驱动杆 3—铰销 4—连杆 5、7—圆柱销 6—手指 8—V形指 9—工件
图3-7所示为齿轮齿条直接传动的齿轮杠杆式手部的结构。驱动杆2末端制成双面齿条,与扇齿轮4相啮合,而扇齿轮4与手指5固连在一起,可绕支点回转。驱动力推动齿条作直线往复运动,即可带动扇齿轮回转,从而使手指松开或闭合。
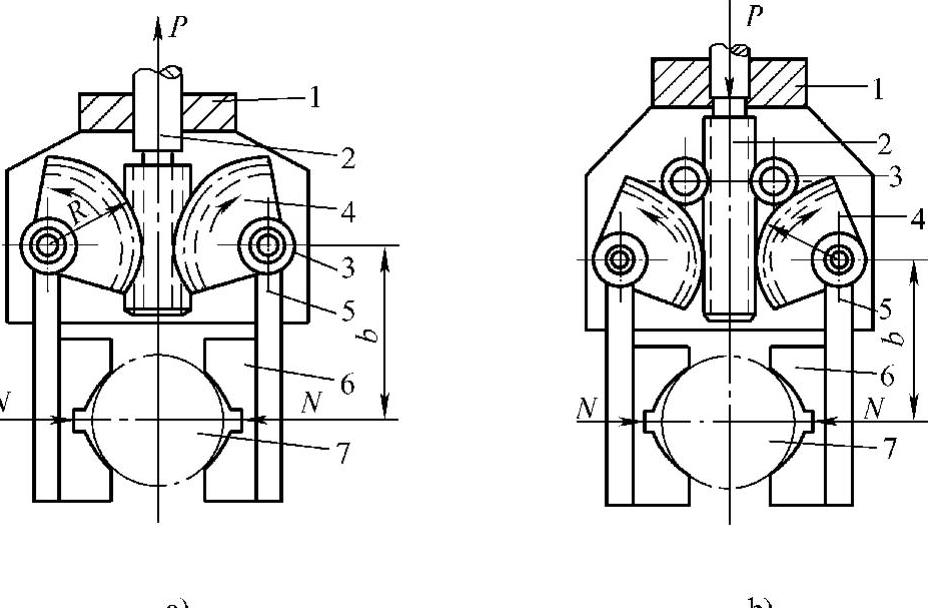
图3-7 齿轮齿条直接传动的齿轮杠杆式手部
a)齿条直接驱动扇齿轮结构 b)带有换向齿轮的驱动结构 1—壳体 2—驱动杆 3—中间齿轮 4—扇齿轮 5—手指 6—V形指 7—工件
(2)平移型传动机构 平移型夹钳式手部是通过手指的指面作直线往复运动或平面移动来实现张开或闭合动作的,常用于夹持具有平行平面的工件。其结构较复杂,不如回转型手部应用广泛。
①直线往复运动机构:实现直线往复运动的机构很多,常用的斜楔传动、齿条传动、螺旋传动等均可应用于手部结构。如图3-8a所示为斜楔平移机构,图3-8b为连杆杠杆平移机构,图3-8c为螺旋斜楔平移机构。它们既可是双指型的,也可是三指(或多指)型的;既可自动定心,也可非自动定心。
②平面平行移动机构:如图3-9所示为几种平移型夹钳式手部的简图。它们的共同点是:都采用平行四边形的铰链机构——双曲柄铰链四连杆机构,以实现手指平移。其差别在于分别采用齿条齿轮、蜗杆蜗轮、连杆斜滑槽的传动方法。
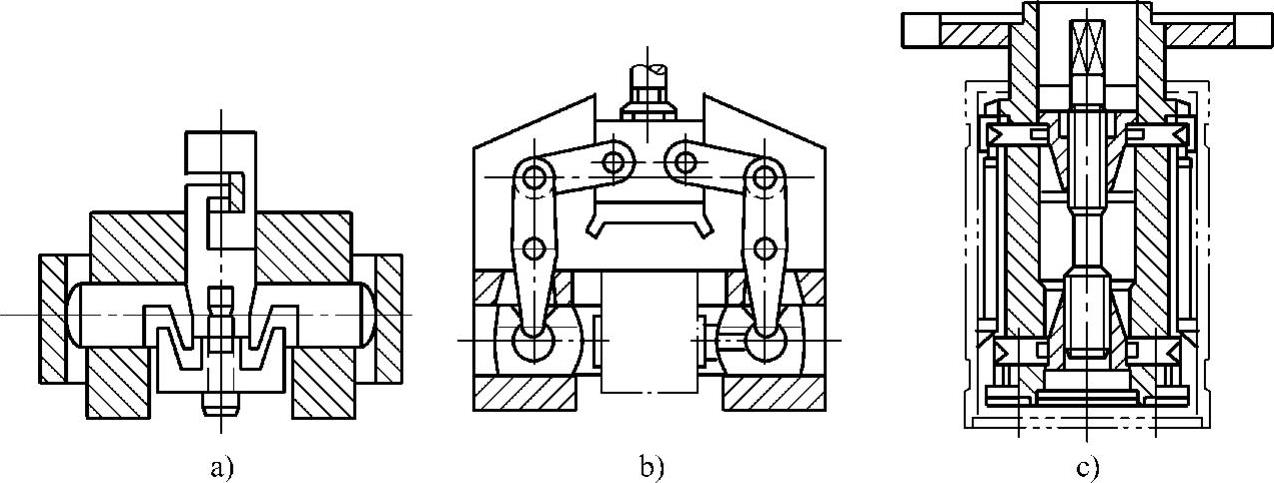
图3-8 直线平移型手部
a)斜楔平移机构 b)连杆杠杆平移机构 c)螺旋斜楔平移机构
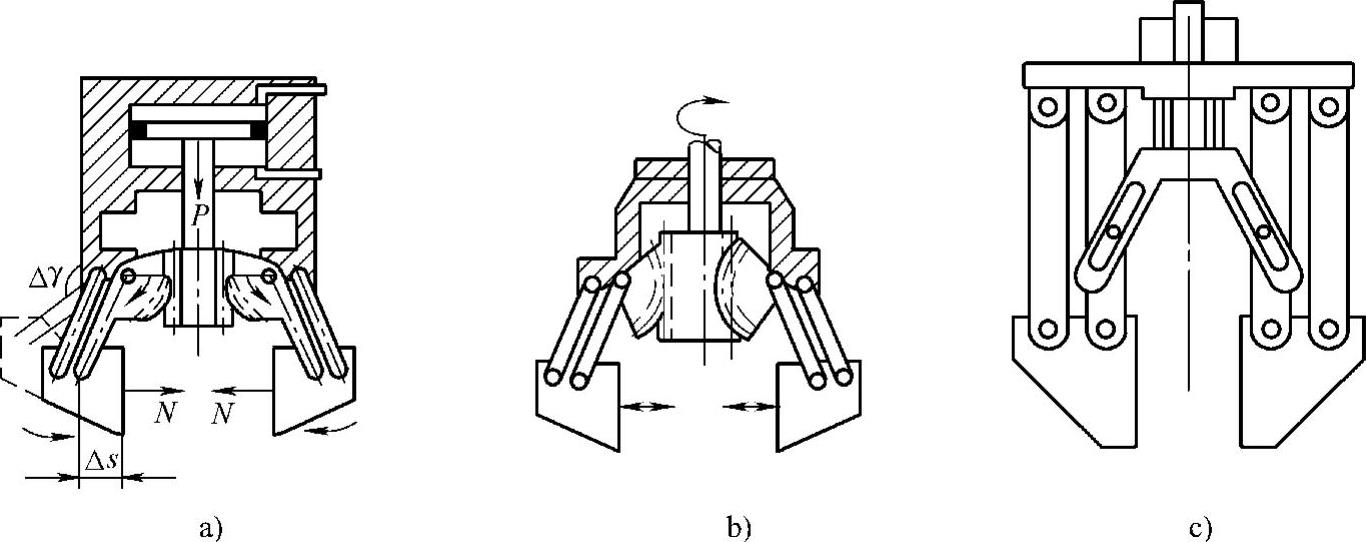
图3-9 平移型夹钳式手部
a)齿条齿轮式传动 b)蜗杆蜗轮式传动 c)连杆斜滑槽式传动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。