



简单的夹钳式取料手不能适应物体外形变化,不能使物体表面承受比较均匀的夹持力,因此无法对复杂形状、不同材质的物体实施夹持和操作。为了提高机器人手爪和手腕的操作能力、灵活性和快速反应能力,使机器人能像人手那样进行各种复杂的作业,如装配作业、维修作业、设备操作以及机器人模特的礼仪手势等,就必须有一个运动灵活、动作多样的灵巧手。
1.柔性手
为了能对不同外形的物体实施抓取,并使物体表面受力比较均匀,因此研制出了柔性手。如图3-19所示为多关节柔性手腕,手指由多个关节串联而成。手指传动部分由牵引钢丝绳及摩擦滚轮组成,每个手指由两根钢丝绳牵引,一侧为握紧,另一侧为放松。驱动源可采用电动机驱动或液压、气动元件驱动。柔性手腕可抓取凹凸不平的外形,并使物体受力较为均匀。
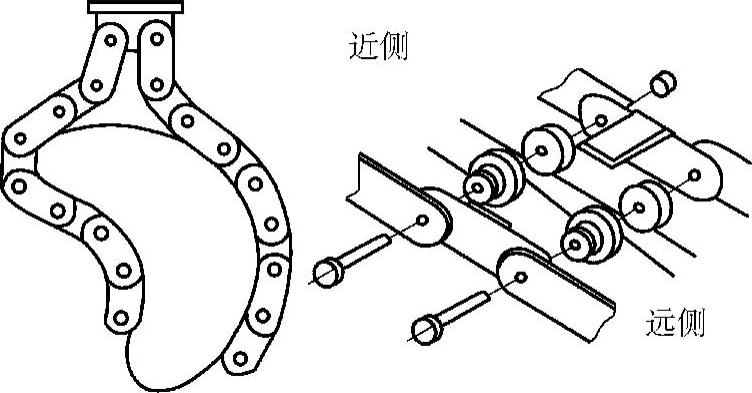
图3-19 多关节柔性手腕
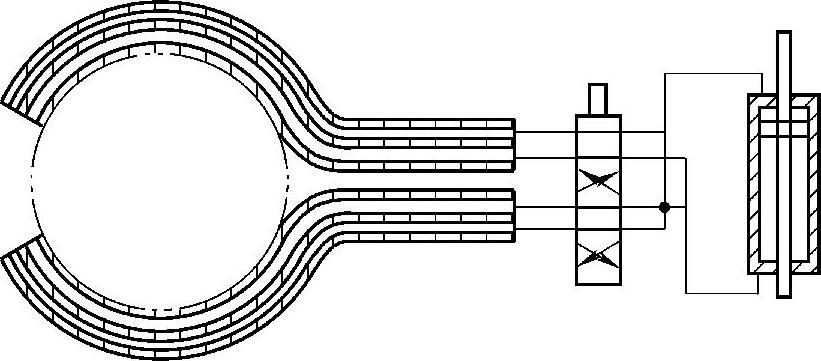
如图3-20所示为用柔性材料做成一端固定、一端为自由端的双管合一的柔性管状手爪。当一侧管内充气体或液体、另一侧管内抽气或抽液时,形成压力差,柔性手爪就向抽空侧弯曲。此种柔性手适用于抓取轻型、圆形物体,如玻璃器皿等。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-20 柔性手
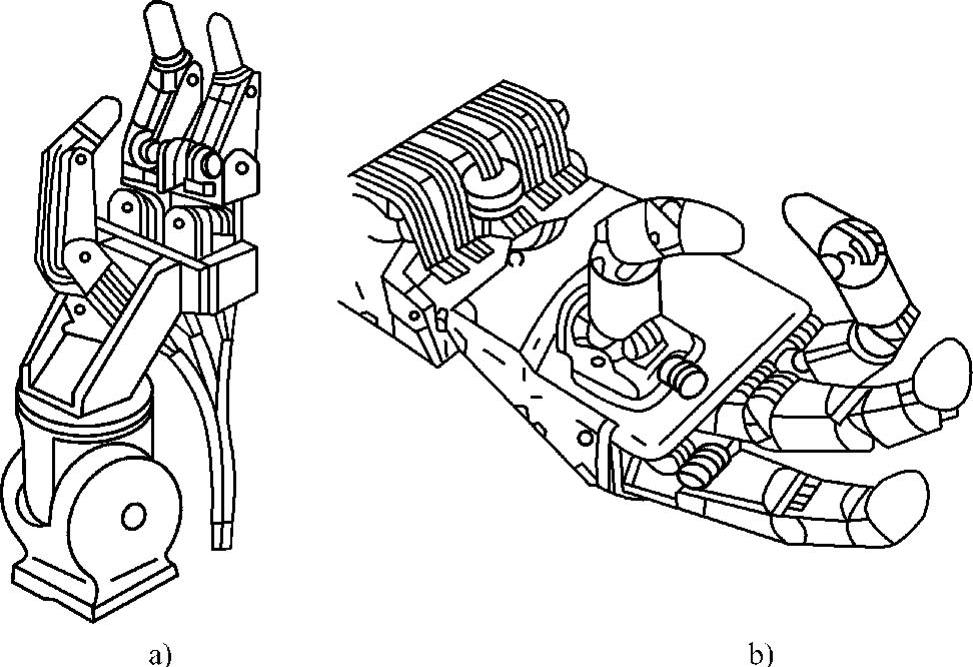
图3-21 多指灵巧手
a)三指 b)四指
2.多指灵巧手
机器人手爪和手腕最完美的形式是模仿人手的多指灵巧手。如图3-21所示,多指灵巧手有多个手指,每个手指有3个回转关节,每一个关节的自由度都是独立控制的。因此,它能模仿几乎人手指能完成的各种复杂动作,如拧螺钉、弹钢琴、作礼仪手势等动作。在手部配置触觉、力觉、视觉、温度传感器,将会使多指灵巧手达到更完美的程度。多指灵巧手的应用前景十分广泛,可在各种极限环境下完成人无法实现的操作,如核工业领域、宇宙空间作业,在高温、高压、高真空环境下作业等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。