



目前,普通工业机器人都能够达到0.1mm的重复精度,无论是直线运动,还是绕轴转动,甚至是复杂的曲面移动,都能够很好地完成。这一方面得益于机械加工精度的日益提高,另一方面依靠了现代化的控制技术保证了机器人定位的精确。
蛇形手臂一般具有高度柔性,可深入装配结构当中进行均匀涂层,从而增加生产率,适用于在飞机翼盒的组装探视工作及引擎组装中的深度检测等。如图3-33所示为典型的飞机装配蛇形手部。
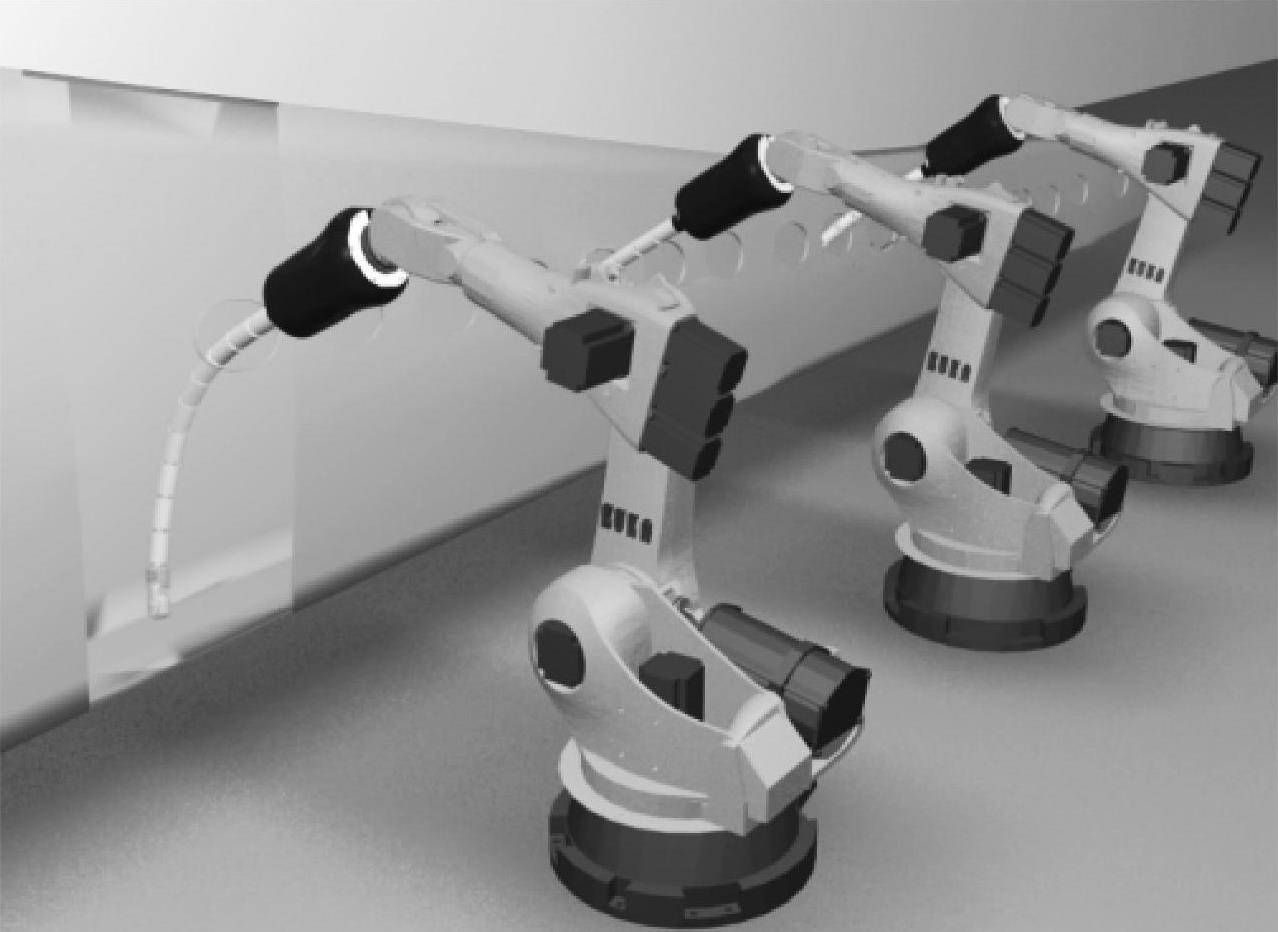
图3-33 典型的飞机装配蛇形手部
图3-34为安装在Kuka的工业机器人上的蛇形机械臂。这一想法的意图在于制造出一个混合型的机械手,它要可以执行多数的任务。而这些任务的胜任者必须能够在有限的空间中,穿过极其细小的孔到达完成任务的地点。蛇形机械臂的基本目的是减少人类在一些活动空间极度狭窄,甚至充满浓烟、粉尘、噪声的环境下工作(见图3-35)。
蛇形机械臂主要原理很简单,主要由几个段组成,每段有两个自由度,由三根电线控制。每一根电线的长度由伺服控制电动机和直线制动器决定,制动器隐藏在手臂底座的制动器包裹内。蛇形机械臂通过拉动或者延伸驱动线的长度来控制形状。用于航空运用的蛇形机器臂共有10个部分;其他用途的机械臂则没有固定,少则10个部分,多可达20个部分。(https://www.xing528.com)
一旦蛇形机械臂在合适的位置落定,操作者就可以在“卡笛儿模式”(Cartesian mode)通过操纵杆移动手臂;它也会自动调整,通过视觉伺服系统为新任务虚位以待。重要的是,当机器手臂收缩时,这一控制程序能够自动考虑到自身的状况而进行姿态调整,因为预先设定的路径可能与实际不一致。

图3-34 蛇形机械臂

图3-35 蛇形机械臂正在探视
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。