



1.移动关节导轨
移动关节导轨的目的是在运动过程中保证位置精度和导向,对机器人移动关节导轨有以下几点要求:
①间隙小或能消除间隙。
②在垂直于运动方向上的刚度高。
③摩擦系数低,但不随速度变化。
④高阻尼。
⑤移动关节导轨和其辅助元件尺寸小、惯量低。
移动关节导轨有5种:普通滑动导轨、液压动压滑动导轨、液压静压滑动导轨、气浮导轨和滚动导轨。前两种具有结构简单、成本低的优点,但是它必须留有间隙以便润滑,而机器人载荷的大小和方向变化很快,间隙的存在又将会引起坐标位置的变化和有效载荷的变化;另外,这种导轨的摩擦系数又随着速度的变化而变化,在低速时容易产生爬行现象(速度时快时慢)。第三种静压导轨结构能产生预载荷,能完全消除间隙,具有高刚度、低摩擦、高阻尼等优点,但是它需要单独的液压系统和回收润滑油的机构。最近,有人在静压润滑系统中采用了高粘度的润滑剂(如油脂),并已用到机器人的机械系统中。第四种气浮导轨是不需回收润滑油的,但是它的刚度和阻尼较低,并且对制造精度和环境的空气条件(过滤和干燥)要求较高,不过由于其摩擦系数低(大约为0.0001),估计将来是会采用的。而目前,第五种滚动导轨在工业机器人中应用最为广泛,因为它具有很多优点:摩擦小,特别是不随速度变化;尺寸小;刚度高,承载能力大;精度和精度保持性高;润滑简单;容易制造成标准件;滚动导轨易加预载、消除间隙、增加刚度。但是,滚动导轨也存在着缺点:阻尼低、对脏物比较敏感。
图3-44a所示为包容式滚动导轨的结构,用支承座支承,可以方便地与任何平面相连。这种情况下,套筒必须是开式的,嵌入在滑枕中,既增强刚度,也方便了与其他元件的连接。由于滑枕的影响,套筒各个方向的刚度是不一样的,如图3-44b所示。
另一种工业机器人经常采用的滚动导轨如图3-45所示。在图3-45a中,滚子安装在定轴上,移动件3沿垂直立柱5移动,固定轴双滚动体2和4支承在移动件的两个凸台上,移动件沿与垂直立柱5相连的轨道1移动。在图3-45b中,导轨上的三个滚动体7沿移动体6滚动,移动体6的转动是由滚动体8限制的。
2.转动关节轴承
球轴承是机器人和机械手结构中最常用的轴承。它能承受径向和轴向载荷,摩擦较小,对轴和轴承座的刚度不敏感。如图3-46a所示为普通深沟球轴承,如图3-46b所示为角接触球轴承。这两种轴承的每个球和滚道之间只有两点接触(一点与内滚道接触,另一点与外滚道接触)。为了预载,此种轴承必须成对使用。如图3-46c所示为四点接触球轴承。该轴承的滚道是尖拱式半圆,球与每个滚道两点接触,该轴承通过两内滚道之间适当的过盈量实现预紧。因此,此种轴承的优点是无间隙、能承受双向轴向载荷、尺寸小、承载能力和刚度比同样大小的一般球轴承高1.5倍;缺点是价格较高。
采用四点接触式设计以及高精度加工工艺的机器人专用轴承已经问世,这种轴承比同等轴径的常规中系列四点接触球轴承轻25倍。机器人专用轴承的结构尺寸和重量如图3-47所示,适合于ϕ76.2~355.6mm的轴径,重量只有0.07~2.79kg。
减轻轴承重量的另一种方法是采用特殊材料。目前,正在研究采用氮化硅陶瓷材料制成球和滚道。陶瓷球的弹性模量比钢球约高50%,但重量比钢球轻很多。(https://www.xing528.com)
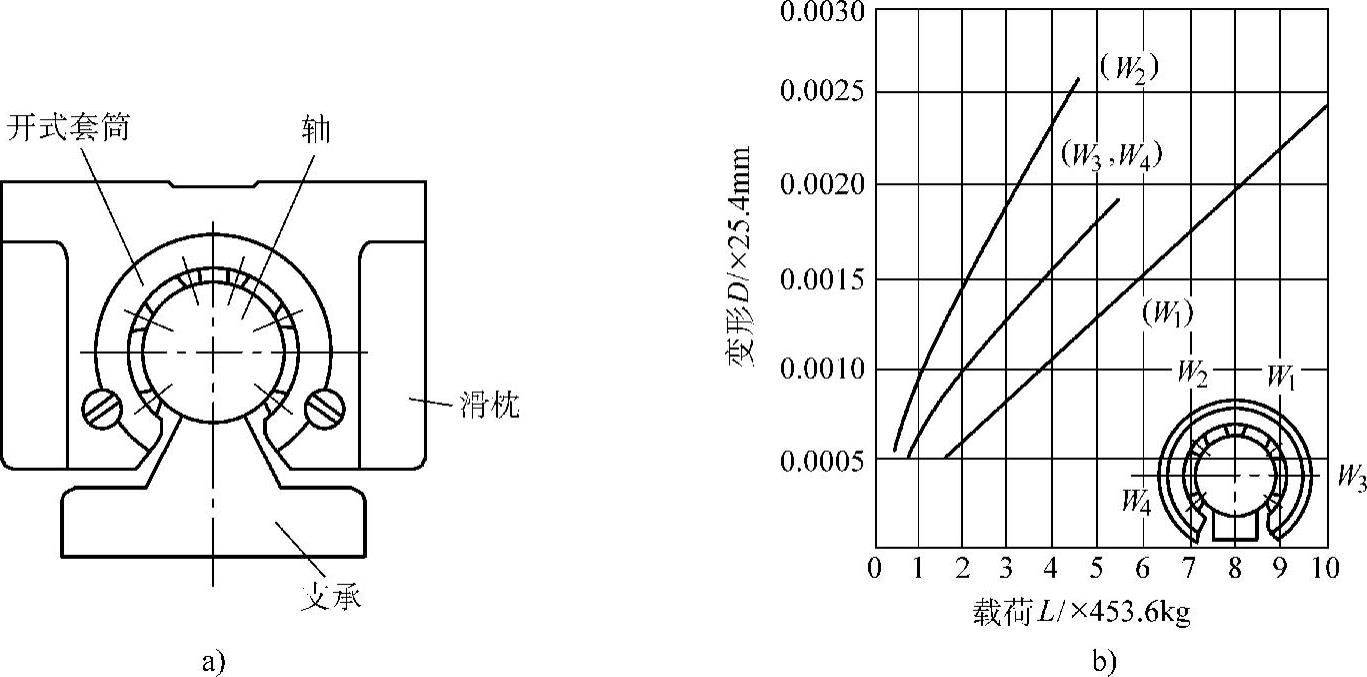
图3-44 滚动导轨
a)开式套筒 b)开式套筒的刚度特性
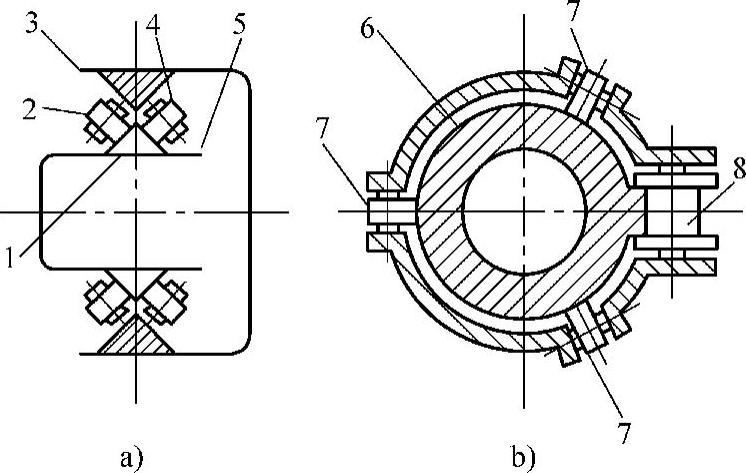
图3-45 固定轴滚动体的滚动导轨
a)双滚动体 b)三滚动体
1—轨道 2、4—固定轴双滚动体 3—移动件 5—垂直立柱 6—移动体 7—三个滚动体 8—滚动体
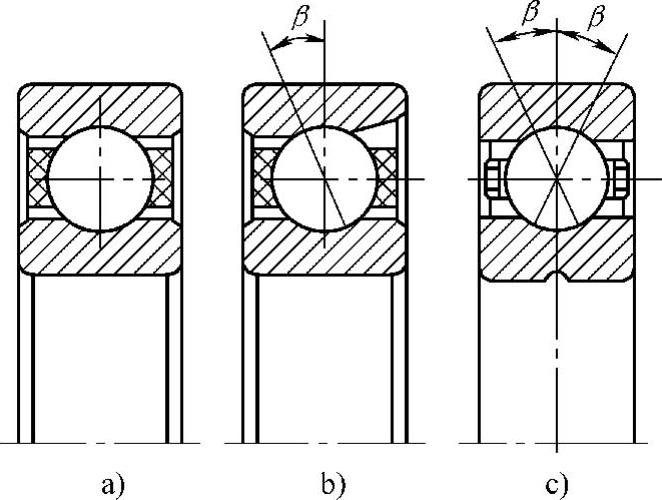
图3-46 基本耐磨球轴承
a)普通深沟球轴承 b)角接触球轴承 c)四点接触球轴承
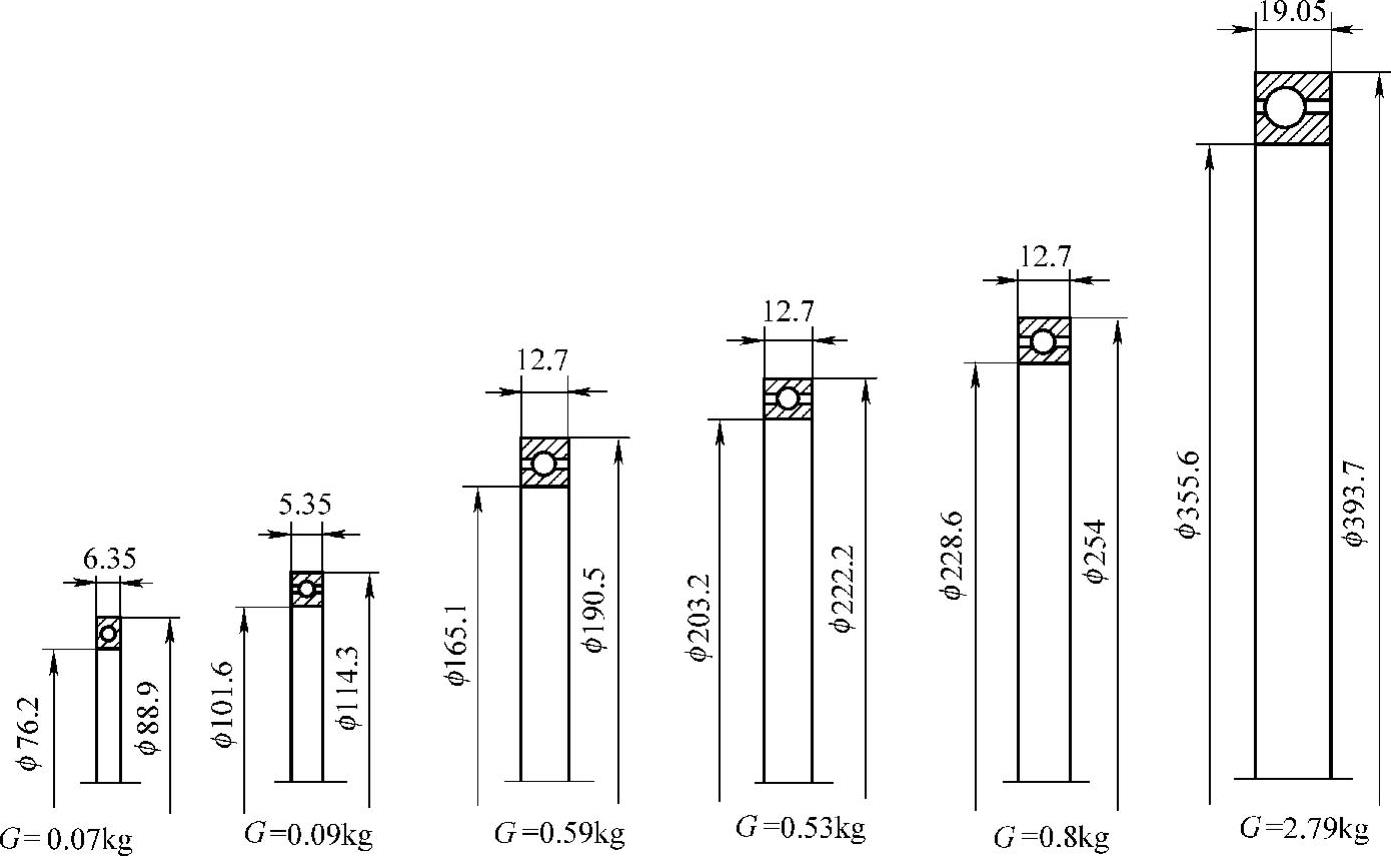
图3-47 机器人专用轴承的结构尺寸和重量
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。