



1.传动件的定位
工业机器人的重复定位精度要求较高,设计时应根据具体要求选择适当的定位方法。目前,常用的定位方法有电气开关定位、机械挡块定位和伺服定位。
(1)电气开关定位 电气开关定位是利用电气开关(有触点或无触点)作行程检测元件,当机械手运行到定位点时,行程开关发出信号,切断动力源或接通制动器,从而使机械手获得定位。液压驱动的机械手运行至定位点时,行程开关发出信号,电控系统使电磁换向阀关闭油路而实现定位。电动机驱动的机械手需要定位时,行程开关发出信号,电气系统激励电磁制动器进行制动而定位。使用电气开关定位的机械手,其结构简单、工作可靠、维修方便,但由于受惯性力、油温波动和电控系统误差等因素的影响,重复定位精度比较低,一般为±3~5mm。
(2)机械挡块定位 机械挡块定位是在行程终点设置机械挡块,当机械手减速运动到终点时,紧靠挡块而定位。若定位前缓冲较好,定位时驱动压力未撤除,在驱动压力下将运动件压在机械挡块上,或驱动压力将活塞压靠在缸盖上就能达到较高的定位精度,最高可达±0.02mm。若定位时关闭驱动油路、去掉驱动压力,机械手运动件不能紧靠在机械挡块上,定位精度就会降低,其降低的程度与定位前的缓冲效果和机械手的结构刚性等因素有关。
如图3-48所示是利用插销定位的结构。机械手运行到定位点前,由行程节流阀实现减速,达到定位点时,定位液压缸将插销推入圆盘的定位孔中实现定位。这种方法的定位精度相当高。
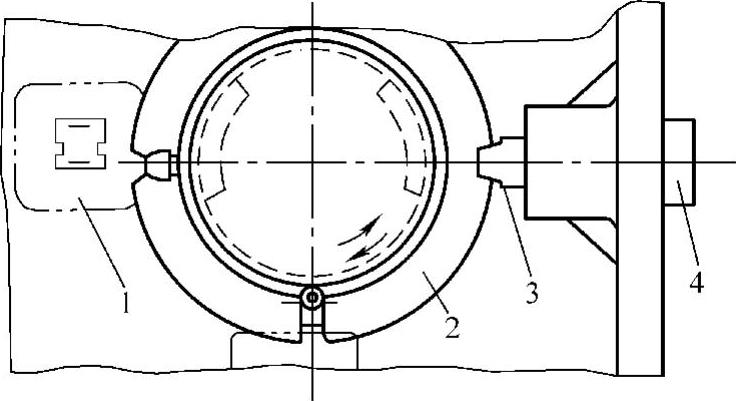
图3-48 利用插销定位的结构
1—行程节流阀 2—定位圆盘 3—插销 4—定位液压缸
(3)伺服定位系统 电气开关定位与机械挡块定位只适用于两点或多点定位,而在任意点定位时,要使用伺服定位系统。伺服系统可以输入指令控制位移的变化,从而获得良好的运动特性。它不仅适用于点位控制,而且也适用于连续轨迹控制。
开环伺服定位系统没有行程检测及反馈,是一种直接用脉冲频率变化和脉冲数控制机器人速度和位移的定位方式。这种定位方式抗干扰能力差,定位精度较低。如果需要较高的定位精度(如±0.2mm),则一定要降低机器人关节轴的平均速度。
闭环伺服定位系统具有反馈环节,其抗干扰能力强、反应速度快、容易实现任意点定位。如图3-49所示是齿轮齿条反馈式电-液闭环伺服定位系统方框图。齿轮齿条将位移量反馈到电位器上,达到给定脉冲时,电动机及电位器触头停止运转,机械手获得准确定位。
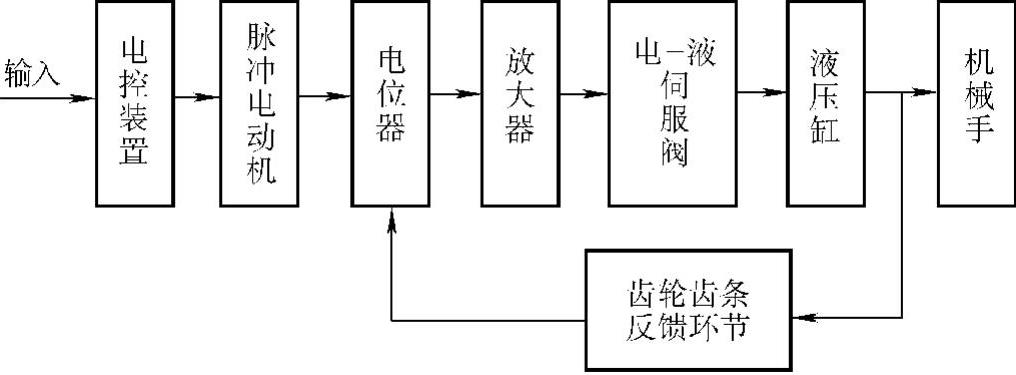
图3-49 齿轮齿条反馈式电-液闭环伺服定位系统方框图
2.传动件的消隙
一般传动机构存在有间隙,也叫侧隙。就齿轮传动而言,齿轮传动的侧隙是指一对齿轮中一个齿轮固定不动,另一个齿轮能够作出的最大的角位移。传动的间隙影响了机器人的重复定位精度和平稳性。对机器人控制系统来说,传动间隙会导致显著的非线性变化、振动和不稳定。传动间隙是不可避免的,其产生的主要原因有:由于制造及装配误差所产生的间隙,为适应热膨胀而特意留出的间隙。消除传动间隙的主要途径有:提高制造和装配精度,设计可调整传动间隙的机构,设置弹性补偿零件。下面介绍几种常用的适合工业机器人的传动消隙方法。
 (https://www.xing528.com)
(https://www.xing528.com)
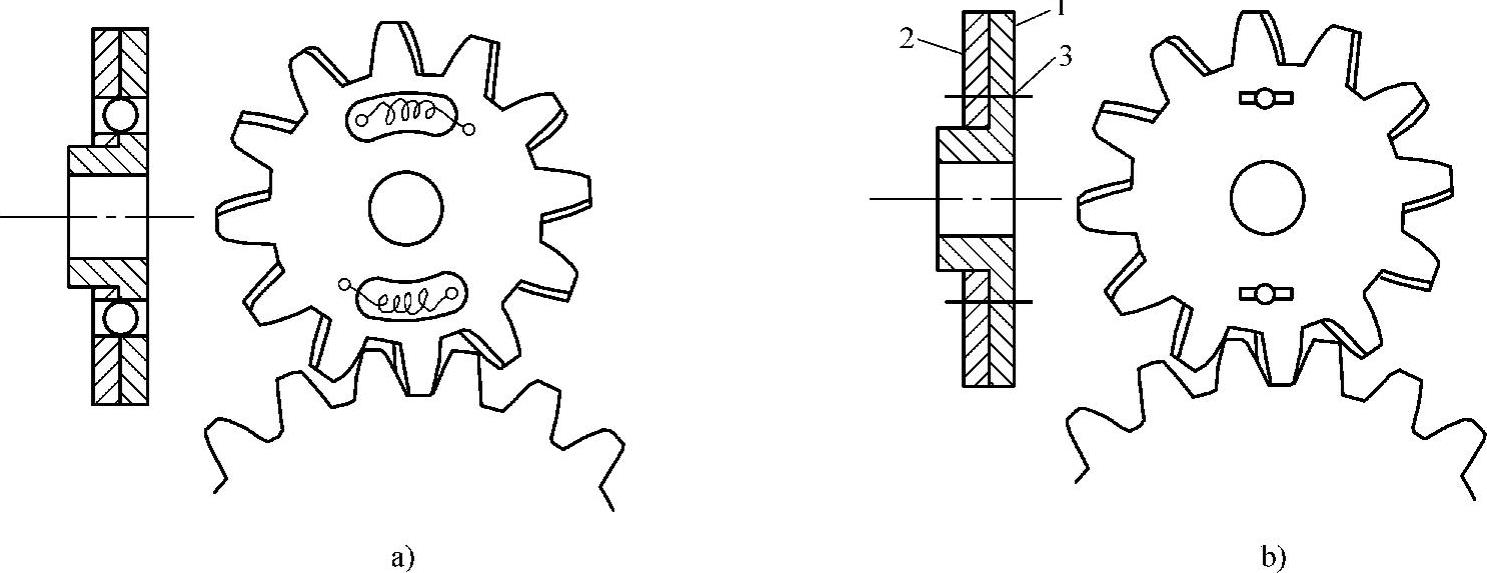
a)弹簧消隙 b)螺钉消隙 1、2—薄齿轮 3—螺钉
图3-50 消隙齿轮
(1)消隙齿轮 如图3-50a所示的消隙齿轮是由具有相同齿轮参数的并只有一半齿宽的两个薄齿轮组成。利用弹簧的压力使它们与配对的齿轮两侧齿廓相接触,完全消除了齿侧间隙。如图3-50b所示为用螺钉3将两个薄齿轮1和2连接在一起,代替图3-50a中的弹簧,其好处是侧隙可以调整。
(2)柔性齿轮消隙 如图3-51a所示为一种钟罩形状的具有弹性的柔性齿轮,在装配时对它稍许加些预载,就能引起轮壳的变形,从而引起每个轮齿的双侧齿廓都能啮合,消除了侧隙。如图3-51b所示为采用了上述同样的原理却用不同设计形式的径向柔性齿轮,其轮壳和齿圈是刚性的,但与齿轮圈连接处具有弹性。对于给定同样的转矩载荷,为了保证无侧隙啮合,径向柔性齿轮所需要的预载力比钟罩状柔性齿轮的要小得多。
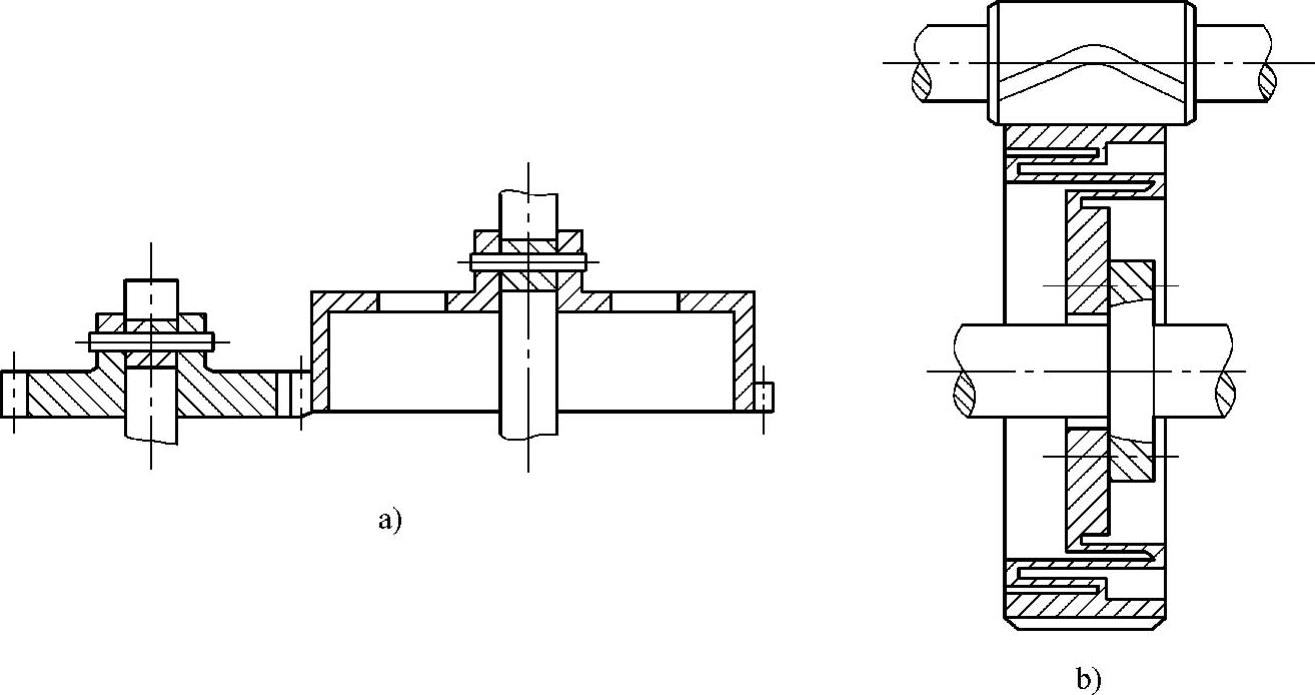
图3-51 柔性齿轮消隙
a)钟罩状柔性齿轮 b)径向柔性齿轮
(3)对称传动消隙 一个传动系统设置两个对称的分支传动,并且其中必有一个是具有“回弹”能力的。如图3-52所示为双谐波传动消隙方法。电动机置于关节中间,电动机双向输出轴传动完全相同的两个谐波减速器,驱动一个手臂的运动。谐波传动中的柔轮弹性很好
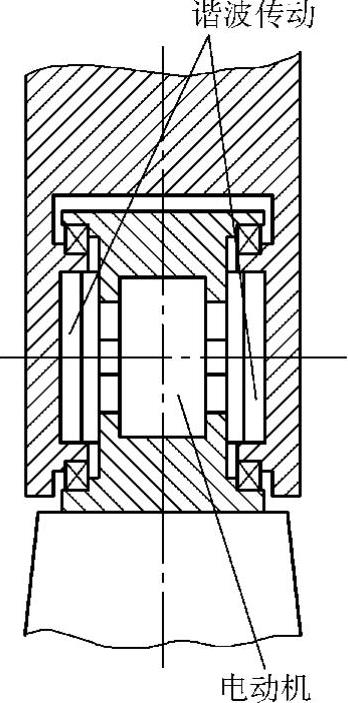
图3-52 双谐波传动消隙方法
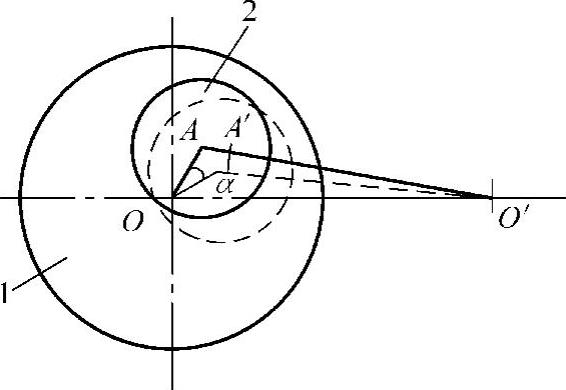
图3-53 偏心消隙机构
1—支架 2—齿轮
(4)偏心机构消隙 如图3-53所示的偏心机构实际上是中心距调整机构。特别是齿轮磨损等原因造成传动间隙增加时,最简单的方法是调整中心距,这是在PUMA机器人腰转关节上应用的又一实例。图中,OO′中心距是固定的;一对齿轮中的一个齿轮装在O′轴上,另一个齿轮装在A轴上;A轴的轴承是偏心地装在可调的支架1上。应用调整螺钉转动支架1时,就可以改变一对齿轮啮合的中心距AO′的大小,达到消除间隙的目的。
(5)齿廓弹性覆层消隙 此种消隙是指齿廓表面覆有薄薄一层弹性很好的橡胶层或层压材料,相啮合的一对齿轮加以预载,可以完全消除啮合侧隙。齿轮几何学上的齿面相对滑动,在橡胶层内部发生剪切弹性流动时被吸收,因此,像铝合金甚至石墨纤维增强塑料这种非常轻而不具备良好接触和滑动品质的材料可用来作为传动齿轮的材料,大大地减少了重量和转动惯量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。