



工业机器人控制方式的分类没有统一的标准。按运动坐标控制的方式来分,有关节空间运动控制、直角坐标空间运动控制;按控制系统对工作环境变化的适应程度来分,有程序控制系统、适应性控制系统、人工智能控制系统;按同时控制机器人数目的多少来分,可分为单控系统、群控系统。除此以外,通常还按运动控制方式的不同,将机器人控制分为位置控制、速度控制、力控制(包括位置/力混合控制)三类。下面按最后一种分类方法,对工业机器人控制方式做具体分析。
1.位置控制方式
工业机器人位置控制又分为点位控制和连续轨迹控制两类,如图4-1所示。
(1)点位控制 这类控制的特点是仅控制离散点上工业机器人手爪或工具的位姿轨迹,要求尽快而无超调地实现相邻点之间的运动,但对相邻点之间的运动轨迹一般不做具体规定。例如在印制电路板上安插元件以及点焊、搬运和上下料等工作都属于点位式工作方式。点位控制的主要技术指标是定位精度和完成运动所需的时间。一般来说,这种方式比较简单,但是要达到2~3μm的定位精度也是相当困难的。
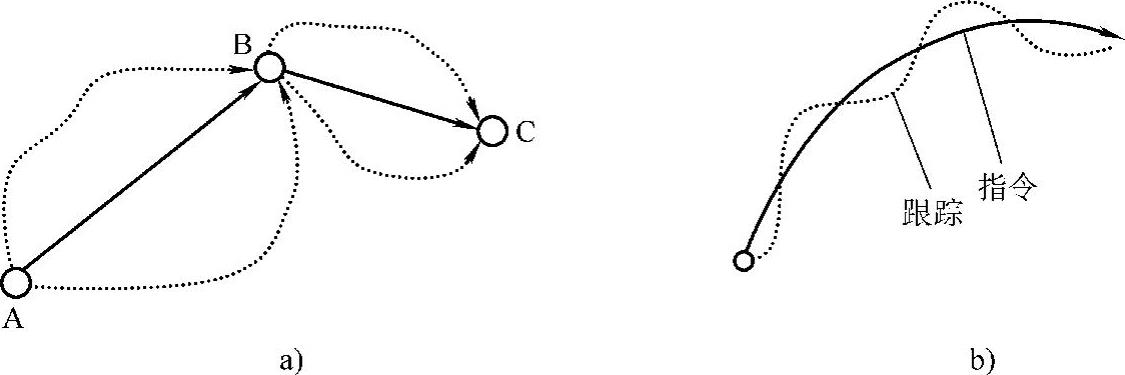
图4-1 位置控制方式
a)点位控制 b)连续轨迹控制
(2)连续轨迹控制 这类运动控制的特点是连续控制工业机器人手爪(或工具)的位姿轨迹。在弧焊、喷漆、切割等工作中,要求机器人末端执行器按照示教的轨迹运动。其控制方式类似于控制原理中的跟踪系统,称为轨迹伺服控制。轨迹控制的技术指标是轨迹精度和平稳性。例如在弧焊、喷漆、切割等场所的工业机器人控制均属于这一类。(https://www.xing528.com)
2.速度控制方式
对工业机器人的运动控制来说,在位置控制的同时,有时还要进行速度控制。例如在连续轨迹控制方式的情况下,工业机器人按预定的指令,控制运动部件的速度和实行加、减速,以满足运动平稳、定位准确的要求。为了实现这一要求,机器人的行程要遵循一定的速度变化曲线,如图4-2所示。由于工业机器人是一种工作情况(行程负载)多变、惯性负载大的运动机械,要处理好快速与平稳的矛盾,必须控制起动加速和停止前的减速这两个过渡运动区段。
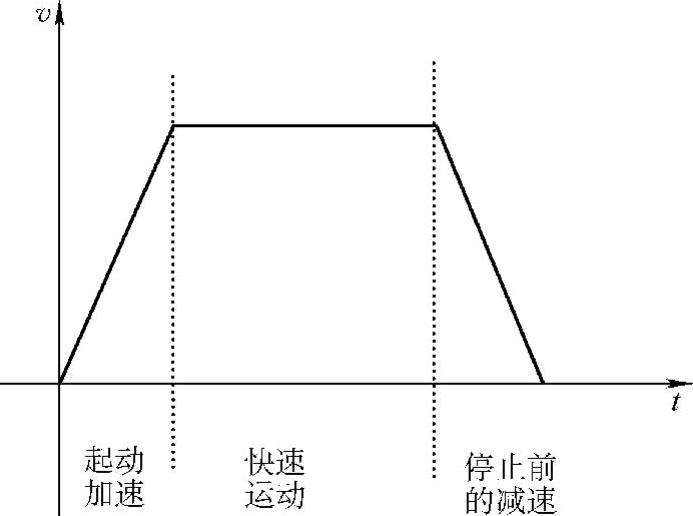
图4-2 机器人行程的速度-时间曲线
3.力(力矩)控制方式
在完成装配、抓放物体等工作时,除了要准确定位之外,还要求使用适度的力或力矩进行工作,这时就要利用力(力矩)伺服方式。这种方式的控制原理与位置伺服控制原理基本相同,只不过输入量和反馈量不是位置信号,而是力(力矩)信号,因此系统中必须有力(力矩)传感器。有时也利用接近、滑动等传感功能进行自适应式控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。