



地面移动机器人是脱离人的直接控制,采用遥控、自主或半自主等方式在地面运动的物体。地面移动机器人的研究最早可追溯到20世纪50年代初,美国Barrett Electronics公司研究开发出世界第一台自动引导车辆系统。由于当时电子领域尚处于晶体管时代,该车功能有限,仅在特定小范围运动,目的是提高运输自动化水平。到了20世纪60、70年代,美国仙童公司研制出集成电路,随后出现集成微处理器,为控制电路小型化奠定了硬件基础。到了20世纪80年代,国外掀起了智能机器人研究热潮,其中具有广阔应用前景和军事价值的移动机器人受到西方各国的普遍关注。日本和美国在移动机器人的发展中处于领先水平。时至今日,各种类型的地面移动机器人纷纷研制出来,其应用范围涉及民用、工业、警用、军用等领域。
1.地面移动机器人的概念、结构形式
在移动机器人系统不断应用的过程中,设计者给出了基于移动机器人系统特征的描述性定义:一般认为,移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的移动平台。如今,移动机器人正向第三代智能机器人方向发展,因此在功能描述上又增加了逻辑思维、学习、判断和自主决策的功能。同时,多数移动机器人都附带操作手臂,从而使其在外形和功能上更具备了仿生性。
针对不同的应用领域、不同的操作需要,移动机器人系统的结构形式也大相径庭,但基本上可以分为轮式移动机器人、履带式移动机器人、仿生足式移动机器人和蠕动爬行移动机器人几种结构形式,如图5-16所示。
在轮式地面移动机器人中,车轮的形状或结构形式取决于地面的性质和车辆的承载能力。在轨道上运行的多采用实心钢轮,室外路面行驶的采用充气轮胎,室内平坦地面上可采用实心轮胎。车轮形状如图5-17所示。
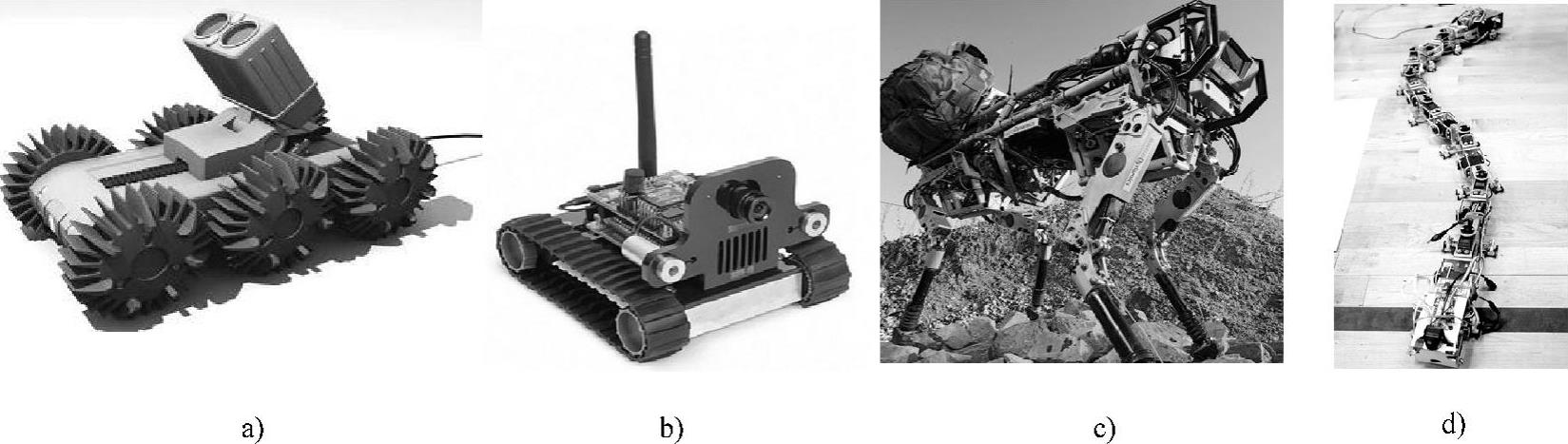
图5-16 地面移动机器人结构形式
a)轮式 b)履带式 c)仿生足式 d)蛇形

图5-17 地面移动机器人常见车轮形状
a)形状一 b)形状二 c)形状三 d)形状四 e)形状五 f)形状六 g)形状七
轮式底盘优点是结构简单、重量轻、轮式滚动摩擦阻力小、机械效率高,适合在较平坦的地面上行驶;缺点是轮子与地面的附着力不如履带式底盘,因而越野性能不如履带式底盘,特别是爬楼梯、过台阶时就比较困难。但近期轮式底盘用得越来越多,因为采用宽式轮胎后,其越野性能提高,一般野外场地都能通过,而履带式底盘因机器人车体小,越野能力总不能和大型履带车辆相比,反而不如轮式底盘方便。
履带式移动机器人适合在未加工的天然路面上行走,它是轮式移动机器人的拓展,履带本身起着给车轮连续铺路的作用。履带式移动机器人和轮式移动机器人相比,具有诸多优点,例如支承面积大、接地比压小、适合于松软或泥泞场地作业、下陷度小、滚动阻力小、通过性能较好;越野机动性好,爬坡、越沟等性能均优于轮式移动机器人;履带支承面上有履齿,不易打滑,牵引附着性能好,有利于发挥较大的牵引力。
履带式移动机器人的常见履带形状如图5-18所示。
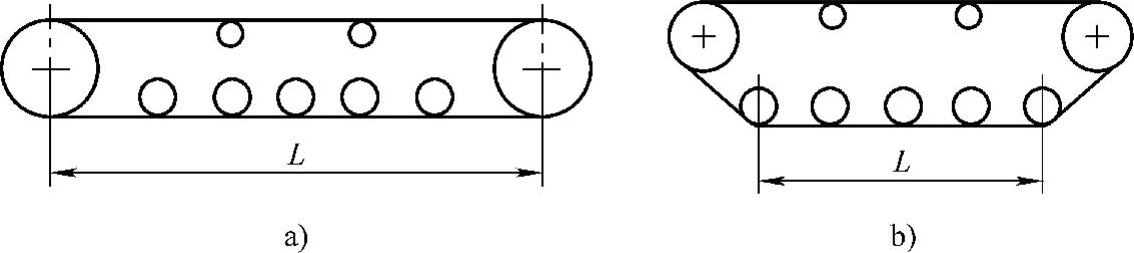
图5-18 履带式移动机器人的常见履带形状
a)形状一 b)形状二
根据实际使用场合的要求,履带也有采取其他形状的,如形状可变履带。所谓形状可变履带,是指该机器人所用履带的外形可以根据地形条件和作业要求进行适当变化。如图5-19所示为一种形状可变履带机器人的外形示意图。该机器人的主体部分是两条形状可变的履带,分别由两个主电动机驱动。当两条履带的速度相同时,机器人实现前进或后退移动;当两条履带的速度不同时,机器人实现转向运动;当主臂杆绕履带架上的轴旋转时,带动行星轮转动,从而实现履带的不同形状,以适应不同的运动和作业环境。
履带式机器人优点是越野能力强,可以爬楼梯、越过壕沟、跨门槛等各种障碍物;缺点是结构复杂、重量大、摩擦阻力大、机械效率低,但采用橡胶履带可以减轻重量。
人类在机器人行走机构研究过程中,从未放弃过研制具有和人类一样仿生步行机构的机器人。步行机器人是一种智能型机器人,它是一门涉及生物科学、仿生学、机构学、传感技术及信息处理技术等技术的综合性高科技技术。在崎岖路面上,步行车辆优于轮式或履带式车辆。腿式系统有很大的优越性:较好的机动性,崎岖路面上乘坐的舒适性,对地形的适应能力强。所以,这类机器人在军事运输、海底探测、矿山开采、星球探测、残疾人的轮椅、教育及娱乐等众多行业有非常广阔的应用前景。多足步行机器人技术一直是国内外机器人领域的研究热点之一。
仿生足式移动机器人与轮式移动机器人相比较,最大的优点就是仿生足式移动机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测、防爆、军事侦察等人类无法完成的或危险的工作。
2.地面机器人关键技术
地面移动机器人系统一般包括机构环节、驱动控制环节、全局反馈环节。其中,高性能驱动控制器、多传感器数据融合、运动学动力学求解理论等已成为地面移动机器人系统的研究热点。
(1)离线驱动控制 目前,移动机器人的驱动控制多采用液压驱动和电动机驱动两种动力源。电动机由于其控制方便、易于实现关节驱动、噪声小等优点,已日益成为主流。从能源供给角度,移动机器人驱动形式主要分为拖缆运行和离线运行两种。离线驱动控制具有更大的能动空间,但受到电池、驱动器重量的限制,目前大多数研究人员在研制移动机器人的过程中多采用拖缆运行形式。因考虑到需要附带执行机构,移动机器人一般设计功率较大,然而目前市场上高功率伺服电动机的控制与驱动产品的体积、重量均较大,且价格不菲,这大大限制了移动机器人的负载空间。因此,实现离线驱动控制存在两个关键问题:
1)研制功重比高的动力源。
2)研制小型、大功率、集成化的新型电动机驱动控制单元。
在解决动力源方面,研究人员一般采用聚合物锂离子动力电池,取得了一定成效。在驱动控制单元方面,随着数字信号处理(DSP)技术以及系统级芯片(System On Chip,SOC)和系统级封装(System In Package,SIP)的发展,将复杂的机器人运动控制算法与单电动机控制算法融为一体,将多个驱动芯片挂靠在同一控制微处理器上,同时将多个这样的单元以总线的形式互连,从而构成集成化的控制系统是研究中采用的主要思路。
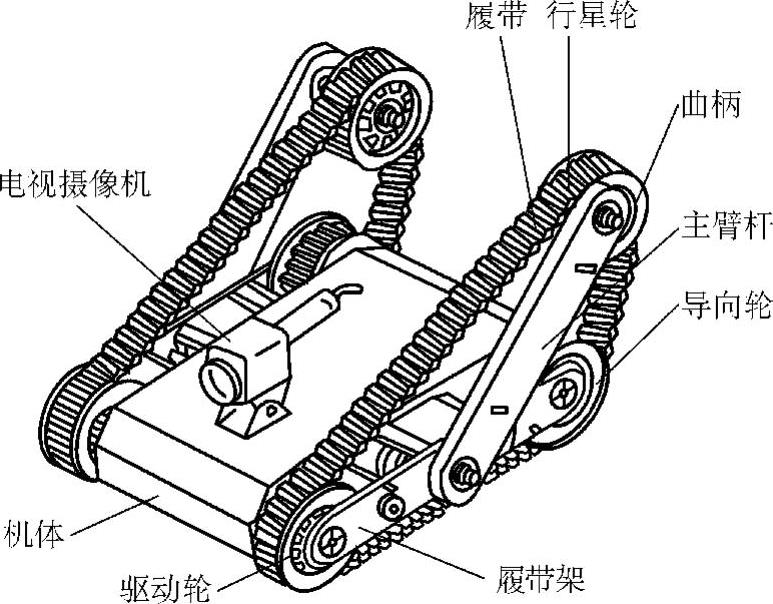
图5-19 形状可变履带机器人的外形示意图
(2)多传感器数据融合技术 在简单的结构化环境中,自动控制技术辅以一定的传感器已足以实现机器人的自动导航控制。当需要在非结构化环境中运行时,设计者就需要考虑从不同的传感器中融合必要的信息。
在早期,多数的数据融合算法是以信度函数(Dempster-Shafer)证据推理为基础的,Waltz和Buede曾把D-S证据推理应用到一些军事指挥和武器控制系统。目前,贝叶斯估计则是数据融合的主要技术基础。贝叶斯估计是统计学中一个重要的组成部分,基本的贝叶斯估计一般只能对相同特征的信息进行融合,因此一般都是与其他技术手段结合起来应用。卡尔曼滤波由于是无偏最优估计,并且计算速度比较快,成为常与贝叶斯估计联合使用的主要方法。Alonzo Kelly曾采用三维状态空间的卡尔曼滤波来进行移动机器人的导航;神经网络具有并行特性和对噪声以及其他因素影响的鲁棒性,也被应用于目标识别和自主导航系统中,但由于存在样本空间和节点数量的问题,尚不能应用于复杂的系统中;小波理论在多传感器数据融合领域的应用也正在展开,目前应用比较多的领域是图像分析,因此其可以看作数据融合过程中用低层处理的手段。数据融合技术还处于一个体系繁复、概念和方法都不统一的初级阶段。数据融合技术需要经历从一个简单的算法到影响系统结构体系的发展过程,建立一种完整的多传感器数据融合理论是研究的主要目标。
(3)运动学动力学理论 目前,制约足式移动机器人广泛应用的主要问题是其稳定性问题。作为一种步行机械,足式移动机器人不仅是多链结构,而且具有时变的运动拓扑,此外还是冗余驱动系统,其运动学及动力学理论比起工业用固定基座式机器人要复杂得多。迄今为止,仍然缺乏足式移动机器人爬行运动学的系统研究,特别是很少有将该机器人视为一整体运动链的运动学研究成果发表。该机器人在进行快速移动、慢速移动、停止、转弯等一系列姿态变换过程中,其平稳性及运动的连续性要求是很高的,必须时刻保持最佳的运动姿态。因此,利用并串联机器人技术的研究来达到多种运动姿态的实现和调整,就成为足式移动机器人的关键技术之一。
3.地面移动机器人实例
(1)地面侦察机器人 地面侦察机器人是军用机器人中发展最早、应用最广泛的一类机器人,也是从军事领域转到警用领域应用最广泛、最成熟的类型。它们往往被要求工作在诸如丘陵、山地、丛林等开阔地形的野外环境中,所以必须具有比较强的地形适应能力及通过能力。

图5-20 背包机器人
1)轻型地面侦察机器人。背包机器人由美国著名的IRobot军用及特种机器人公司开发,其大小跟一只鞋盒差不多,高度不足20cm,自身重量18kg,如图5-20所示。该机器人装备了远距离光学和红外摄像机,还可以接装延长杆、安装摄像头,以得到更高的观察点。此外,也可加装传声器、声波定位仪、红外线传感器、罗盘、激光扫描仪、微波雷达等传感设备。
背包机器人的可变形履带结构及模块化的设计都成为了移动机器人设计中的经典,很多国内外研究单位和公司都参照背包机器人的样式开发了类似平台。背包机器人目前有3种型号:侦察型、探险型和处理爆炸装置型,如图5-21所示。
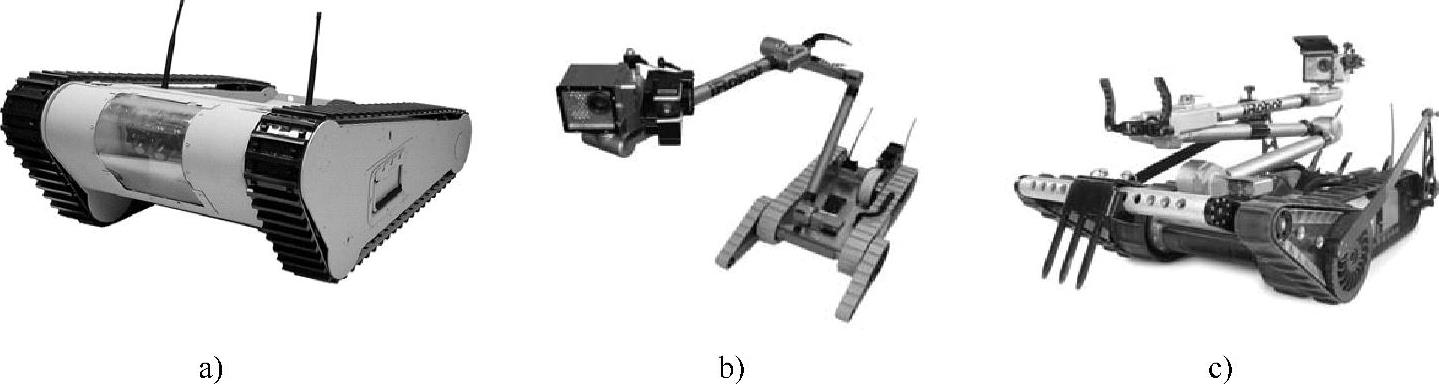
图5-21 背包机器人
a)侦察型 b)探险型 c)处理爆炸装置型
对应不同的应用环境,背包机器人所独有的支臂结构是其具有较强越野能力的基础。在面对较高障碍时,前支臂可以充当一个杠杆的角色,将机器人整体长度延长,并且可以将机器人撑起,以越过障碍,如图5-22所示。

图5-22 背包机器人越障
IRobot公司及美国国防高级研究计划局在背包机器人的基础上,又开始了下一代小型无人操作陆地机器人(Small Unmanned Ground Vehicle,SUGV)的研究,如图5-23所示。新机器人更加小型化,具有更轻的重量,但是保持了原有的机动性和通过能力。

图5-23 小型无人操作陆地机器人
2)布控式地面侦察机器人。“龙行者”(Dragon Runner)机器人是一种微小型四轮地面侦察机器人,由美国宾夕法尼亚州匹兹堡的卡内基·梅隆大学机器人技术研究所联合美国弗吉尼亚海军研究实验室共同研制。它实际上是一种新型的便携式地面传感器,通过建立侦察、监测、搜索及目标信息获取的传感器网络,来提供视野之外的现场情况信息。
“龙行者”机器人由地面移动传感器小车、操作控制器和用户界面组成,包括音频、视频和运动传感器,具有全天候目标搜集功能,整个系统重7.45kg。其中,地面移动传感器小车的外形尺寸为39.4cm×28.6cm×12.7cm,如图5-24所示。其中,图5-24a为“龙行者”机器人小车,图5-24b为整个系统组成。
3)安检机器人。安检机器人综合排爆、侦察、检测等功能,在各种军事基地、仓库、机场、公交、港口及大型活动场所中大显身手,如图5-25所示。
2003年,具有室外安全检查功能的欧弗洛(OFRO)地面侦察机器人投入使用。它由德国ROBOWATCH公司研制,长104cm,宽70cm,高140cm,重54kg,负载20kg,爬坡角度30°,工作时间12h,最大移动速度0.7m/s。该机器人拥有一个红外摄像机、一个CCD摄像机和一个传声器,可以在白天、夜间进行不间断侦察,如图5-26所示。(https://www.xing528.com)

图5-24 “龙行者”机器人的地面移动传感器小车及整个机器人系统组成
a)Dragon Runner机器人的地面移动传感器小车 b)整个机器人系统组成

图5-25 安检机器人

图5-26 欧弗洛机器人
4)地面武装侦察车辆。“徘徊者”(PROWLER)侦察机器人是美国机器人防务系统公司设计的首辆“真正”的军用机器人车。PROWLER是英文Programmable Robot Observer with Logical Enemy Response的缩略语,意即具有逻辑响应能力的可编程机器人观察车。该车作为一种全地形轮式车辆,主要用于执行重要区域边界上的巡逻任务。
该机器人采用一种6×6轮式全地形车辆,用柴油机作为动力,装在车辆后部,能在最高速度27km/h的情况下载重907kg。它采用低压轮胎,具有轮式车辆的优点,车速高、造价低,且维修较少,6个车轮均采用液压闭锁装置和制动防滑系统,行程为250km,如图5-27所示。
萨格(SARGE)侦察机器人是美国Sandia国家实验室在20世纪90年代中期研制的监视与侦察地面装备,是迪克斯(DIXIE)车辆的变型车,如图5-28所示。该机器人是20世纪90年代初为满足战术无人地面车辆(TUGV)项目的要求而研制的。它以雅马哈6×6全地形车平台为基础,可以遥控或手动驾驶,其传感器包括昼/夜摄像机、前视红外仪、激光测距仪和声音传感器组件。

图5-27 “徘徊者”侦察机器人
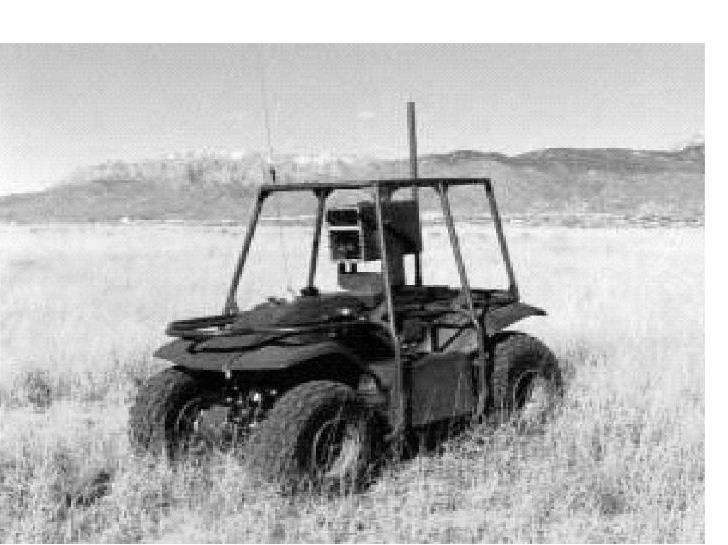
图5-28 萨格侦察机器人
(2)排爆机器人 排爆机器人(Explosive Disposal Robot)是专门用于搜索、探测、处理各种爆炸危险品的机器人。目前,排爆机器人移动载体主要有履带式、轮式以及两者的组合等几种方式。
1)MR-5型排爆机器人。MR-5型新一代排爆机器人(EODR)具有卓越的灵巧性与敏捷度,可以用于监测、勘察及处理危险品(如土制爆炸品、危险性化学品、放射线物质)等。
该机器人备有6个车轮、1套活动履带,必要时可将履带装上,用于跨越崎岖不平的地形和楼梯等各种障碍,如图5-29所示。MR-5型排爆机器人基于最新机械和计算机科技,由1个坚固耐用的平台、1个灵巧的机械臂、10个操作控制台和多种操作工具及配件所组成。MR-5型排爆机器人的特点是具有可快速移动的履带,前后均有可快速移动、与关节相连的车轮。这种结构使其行走于楼梯间及斜坡时更加稳定。
MR-5型排爆机器人不是一个能够自动发现并消灭目标的自动机器人,它需要由人来控制。MR-5型排爆机器人身上的摄像装置可将周围图像传输给操控者。操控者一旦发现图像中有目标出现,就会按动按钮,收到指令后,机器人便会消灭目标,从而保护操控者避免受到伤害。MR-5型排爆机器人也可以在门上钻孔,然后将摄像头探进门内观察室内的情况。
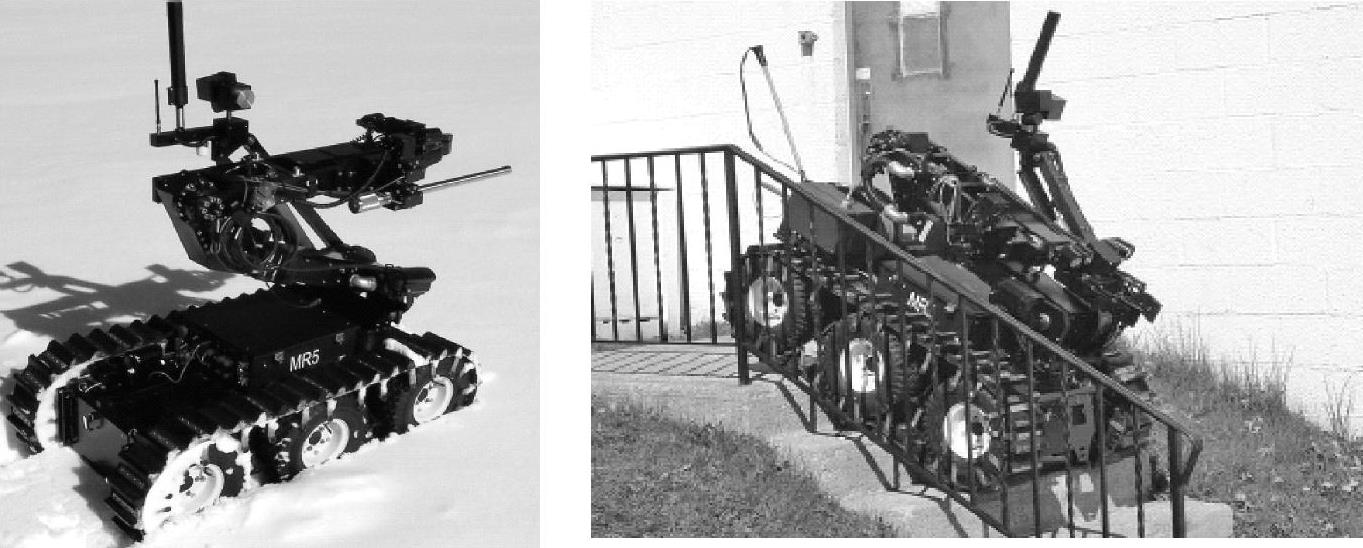
图5-29 MR-5型排爆机器人
2)安德罗斯(Andros)排爆机器人。安德罗斯机器人可用于小型随机爆炸物的处理,其中,F6A型采用活节式履带(见图5-30),能够跨越各种障碍,在复杂的地形上行走。其速度为0~5.6km/h、无级可调;完全伸展时的最大抓取重量为11kg;配有3个低照度CCD摄像机;可配置X射线机组件(实时X射线检查或静态图片)、放射/化学物品探测器、霰弹枪等;可用于排爆、核放射及生化场所的检查及清理,处理有毒、有害物品及机场保安等。
3)国产“灵蜥”排爆机器人。“灵蜥”排爆机器人是在国家863计划支持下,先后研制出A型、B型、H型、HW型等,具有探测及排爆多种作业功能。它由履带复合移动部分、多功能作业机械手、机械控制部分及有线(无线)图像数据传输部分组成。
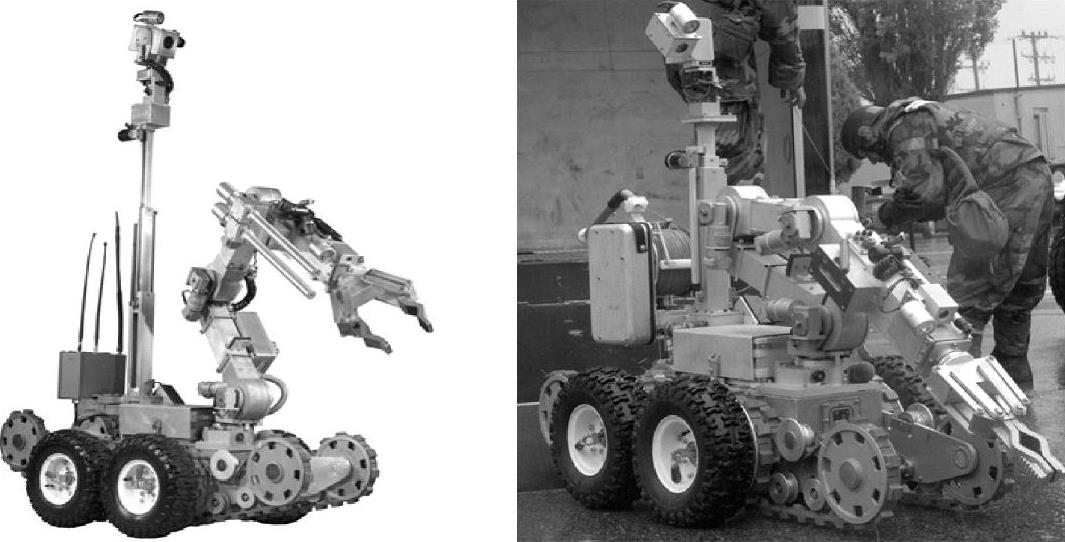
图5-30 安德罗斯F6A型排爆机器人
“灵蜥”系列排爆机器人具有极强的地面适应能力,可以在不同路面下前后左右移动和原地转弯;在爬坡、爬楼梯、越障碍时,机器人采用履带移动方式;在平整人工地面时,机器人采用轮子移动方式,充分发挥了两者的优点;而且可以根据使用要求装备爆炸物销毁器、连发霰弹枪、催泪弹等,完成相应的特种功能。
该机器人具有一只4自由度机械手(可根据需求增加1个伸缩自由度),最大伸展时抓取重量为8kg,作业的最大高度达到2m,如图5-31所示。另外,该机器人装有两台摄像机,用于观察环境和控制作业;照明系统采用硅晶体作为照明材料,体积小、重量轻、功耗低、亮度高,安全可靠。
(3)消防机器人 消防机器人作为特种消防设备,可代替消防队员接近火场,实施有效的灭火救援、化学检验和火场侦察。它的应用将提高消防部队扑灭特大恶性火灾的实战能力,对减少国家财产损失和人员伤亡产生重要的作用。
1)LUF60灭火水雾机器人。德国研发的履带式遥控LUF60灭火水雾机器人(见图5-32),集排烟、稀释、冷却等功能于一体,可在300m距离内进行遥控操作,主要用于隧道、地下仓库等封闭环境内的抢险救援。
这台灭火水雾机器人共有360个喷嘴,从这些喷嘴中喷出的水雾射程可达到60m,喷雾的覆盖面积相当于普通水枪的3~5倍。在处理危险化学品事故时,它比普通水枪喷出的水柱具有更好的稀释和冷却效果,同时还能有效减少用水量和水渍损失。
“陆虎60雪炮车”消防工具可用排风机迅速排出隧道、地下建筑中的浓烟,1h可以排出25万m3的浓烟。灭火时,还可以用喷嘴喷出水雾或泡沫。该机器人长2.316m、宽1.346m,速度可达40km/h,最远遥控距离为300m,配备的履带底盘可以保证机器人爬上大约30°斜角的楼梯或斜坡。同时,它还可以越过一些障碍物和沟渠进入火场。

图5-31 “灵蜥”排爆机器人
2)FFR-1消防机器人。美国InRob Tech公司生产的FFR-1消防机器人,在高温环境中具有顽强的生命力,它的冷却系统可以在6000℃的高温环境下使机器人保持在600℃。该机器人长162cm、宽114cm、高380cm,重940kg。它由无线控制,自带推进电池,有两个CCD视频摄像机;行驶速度为3~4km/h,可爬坡30°斜角,能跨越障碍物高度为20cm,如图5-33所示。
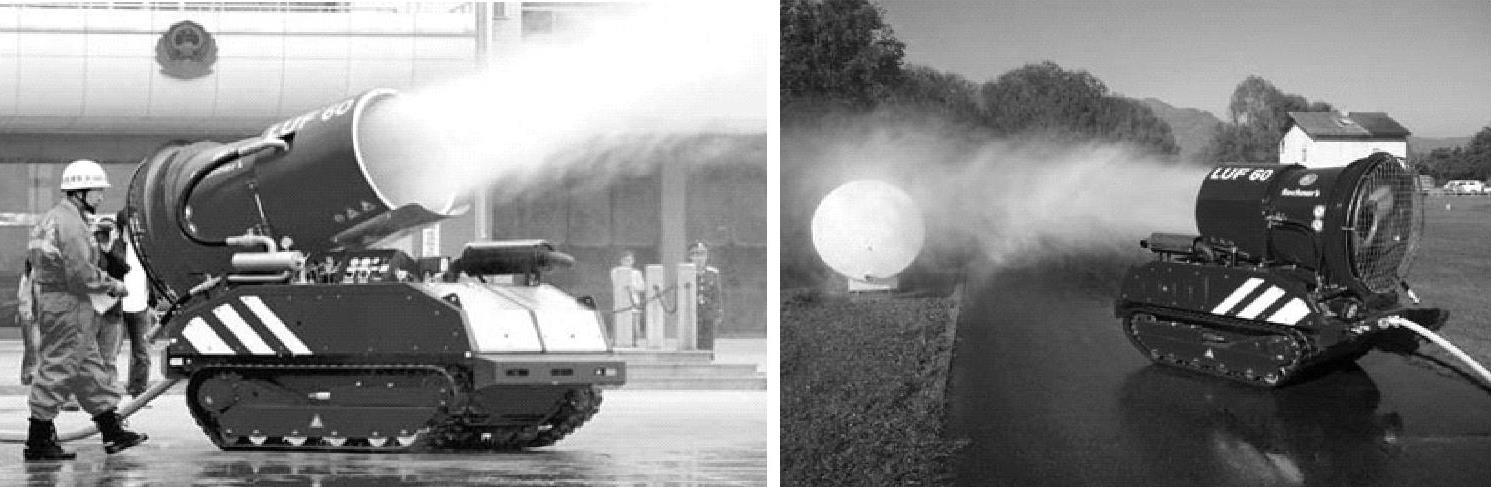
图5-32 LUF60灭火水雾机器人
3)“安娜·康达”蛇形机器人。挪威SINTEF研究基金会的波尔·利尔杰贝克等人研制成功了一种形似蟒蛇的消防机器人。“安娜·康达”蛇形机器人长度为3m,重量约70kg,如图5-34所示。它可以与标准的消防水龙带相接,并牵着它们进入消防队员无法到达的区域进行灭火。据悉,“安娜·康达”机器人的行动非常灵活,可以非常迅速地穿过倒塌的墙壁,代替消防队员进入高温和充满有毒气体的危险火灾现场。

图5-33 FFR-1消防机器人

图5-34 “安娜·康达”蛇形机器人
该机器人的能量供给方式也非常奇特,它能够直接从消防水龙带中获取前进的动力。“安娜·康达”机器人全身共安装有20个靠水驱动的液压传动装置。由于每一个传动装置的开关都由计算机进行精确控制,因此机器人能够像蛇一样灵活地移动。
在使用过程中,消防队员可对“安娜·康达”机器人实施远距离遥控,并能通过设置在机器人前端的摄像机及时了解火情。该机器人内部安装有大量电子传感器,因此具备了一定的独立活动能力。在使用过程中,先由控制人员标出需要到达的具体地点,然后机器人将根据障碍物所处的位置,自主决定行进路线。
这种蛇形机器人的功率非常强大,不但可沿楼梯爬行,而且还能抬起一部小汽车。此外,由于其外壳非常坚固,它还能砸穿墙壁。该机器人可以在隧洞事故中发挥重要作用,既可以用于灭火,也可向被困人员运送呼吸面罩等救援物品。
4)消防救援机器人。消防救援机器人的研究开发及应用,日本最为领先,其次是美国、英国和俄罗斯等国家。日本的救护机器人于1994年第一次投入使用,机器人能够将受伤人员转移到安全地带。机器人长4m、宽1.74m、高1.89m,重3860kg。它装有橡胶履带,最高速度为4km/h;有信息收集装置,如电视摄像机、易燃气体检测仪、超声波探测器等;具有两只机械手,最大抓举重量为90kg。该机器人可将受伤人员举起送到救护平台上,如图5-35所示。
日本Tmsuk机器人公司新研制成功T-53 Enryu救援机器人。这个2.8m高、3t重的救援机器人的两个机械臂能搬运沉重的物体,可由一人操作,也可遥控作业,如图5-36所示。

图5-35 日本救护机器人

图5-36 T-53 Enryu救援机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。