



在绝大多数场合,αi主轴驱动和伺服共用电源模块。主轴模块均为单轴,外形与模块规格有关,但连接器布置和连接要求基本相同。αiSP主轴模块有单传感器输入(A型)和双传感器输入(B型)两种规格,A型模块只有标准外置编码器连接接口JYA3;B型模块带扩展接口JYA4,可连接正弦波输入的外置编码器。
主轴与电源、伺服模块间需要连接直流母线(L+/L-)和控制总线CXA2A/CXA2B,其连接要求可参见图7.4-7,模块的其他连接要求如下。
1.I/O-Link总线
αi主轴模块通过I/O-Link串行主轴总线与CNC连接,模块的JA7B为I/O-Link总线输入端,它和CNC的串行主轴接口JA41连接;在多主轴控制时,可通过总线输出连接器JA7A连接下一主轴模块,I/O-Link总线连接要求如图7.4-11所示。
2.编码器输出连接
主轴电动机的内置编码器信号可通过连接器JX4输出到模块外部,供其他控制装置使用。例如,在主轴电动机和主轴直接连接或通过同步带、齿轮1∶1传动的场合,内置编码器输出可作为CNC的主轴位置检测信号,用于CNC的主轴定向准停、定位或螺纹切削加工等控制。
模块的内置编码器信号的输出接口为JX4,输出信号为1024P/r的A、B、C三相差分脉冲。当信号提供CNC使用时,它需要连接到CNC的串行主轴总线和编码器连接接口JA41上,其连接要求如图7.4-12所示。
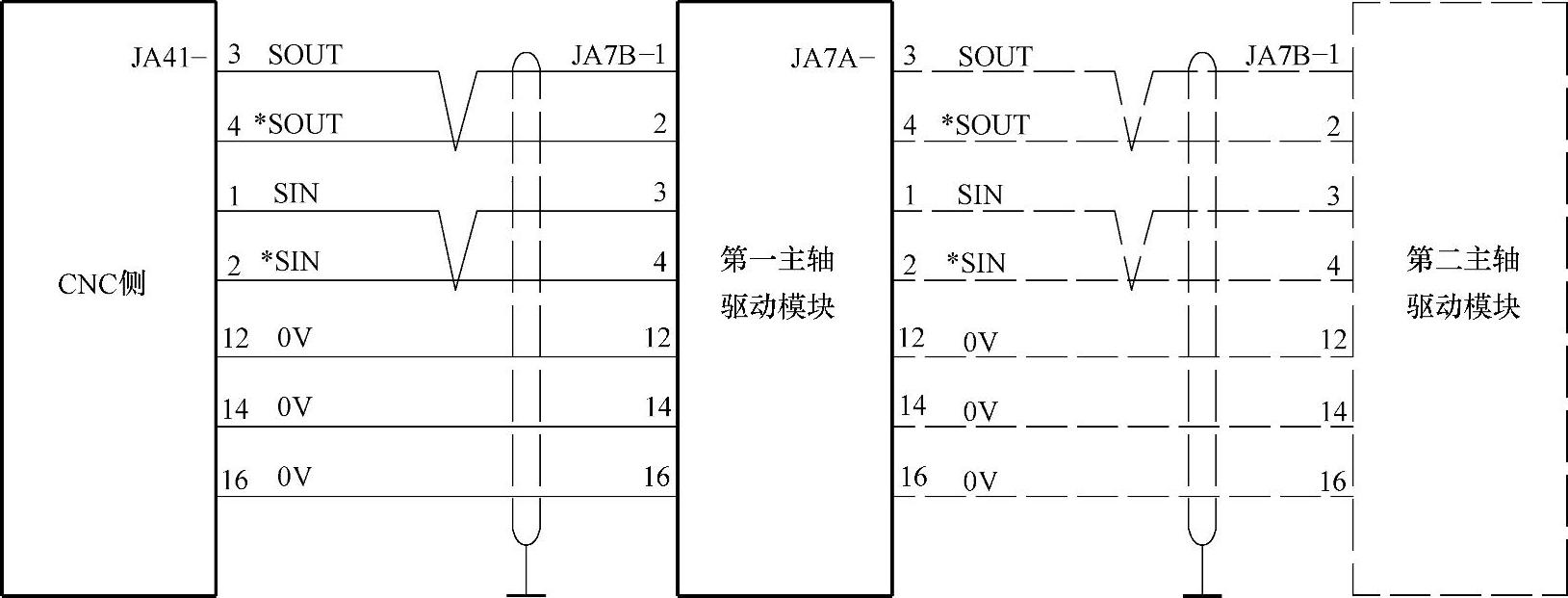
图7.4-11 I/O-Link总线连接
3.主轴电动机连接
①电枢连接。主轴模块的电动机电枢连接有插接式(CZ2)和接线端(TB2)两种形式,模块的U/V/W必须与电动机的U/V/W一一对应,其连接要求如图7.4-13所示。
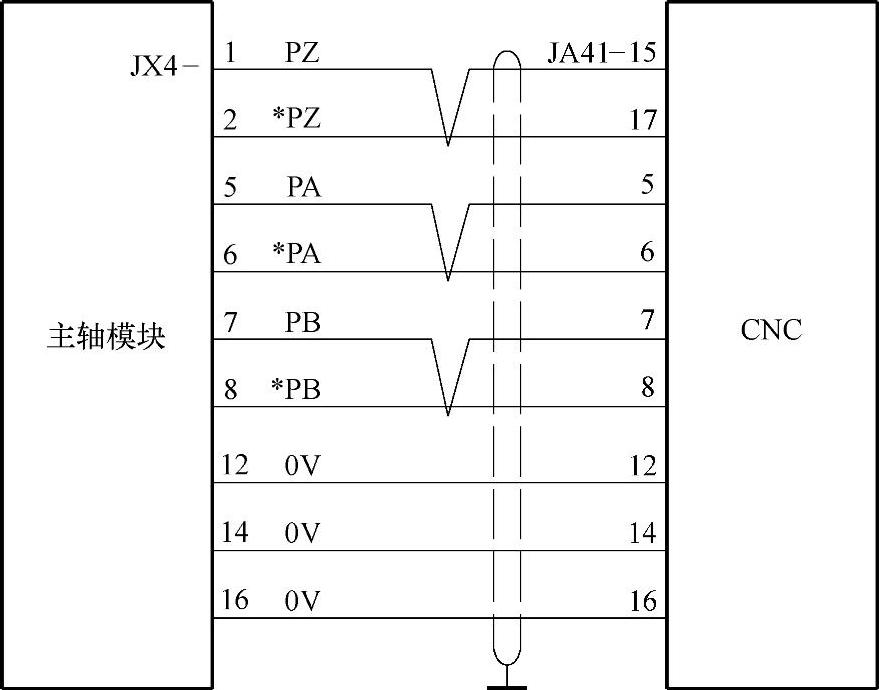
图7.4-12 位置反馈的连接
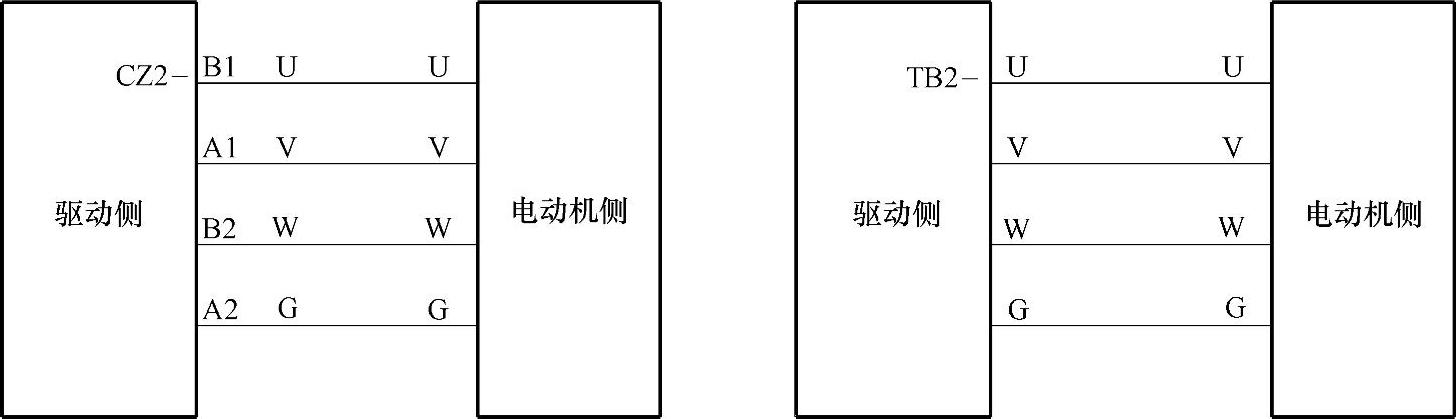
图7.4-13 主轴电动机电枢连接
②内置编码器连接。采用标准结构的αiI/βiI系列标准主轴电动机或αiIP/βiIP系列宽调速主轴电动机,可通过主轴电动机内置式编码器,检测主轴电动机的实际转速或位置;但BiI系列电主轴需要安装CZi或BZi分离型外置磁性编码器,检测主轴电动机的实际转速或位置。
αiI/βiI、αiIP/βiIP系列主轴电动机的内置编码器可根据需要选配Mi、MZi两种规格。如果机床主轴只需要进行速度控制,或者主轴安装有光电编码器或CZi、BZi外置磁性编码器,电动机内置编码器可选择不带零脉冲检测信号的Mi型磁性编码器;如果主轴需要通过内置编码器进行定向准停、定位、螺纹切削、刚性攻螺纹、Cs轴等位置控制,则必须选择带零脉冲检测信号的MZi型磁性编码器。
主轴模块和主轴电动机内置编码器的连接器为JYA2,其连接要求如图7.4-14所示。
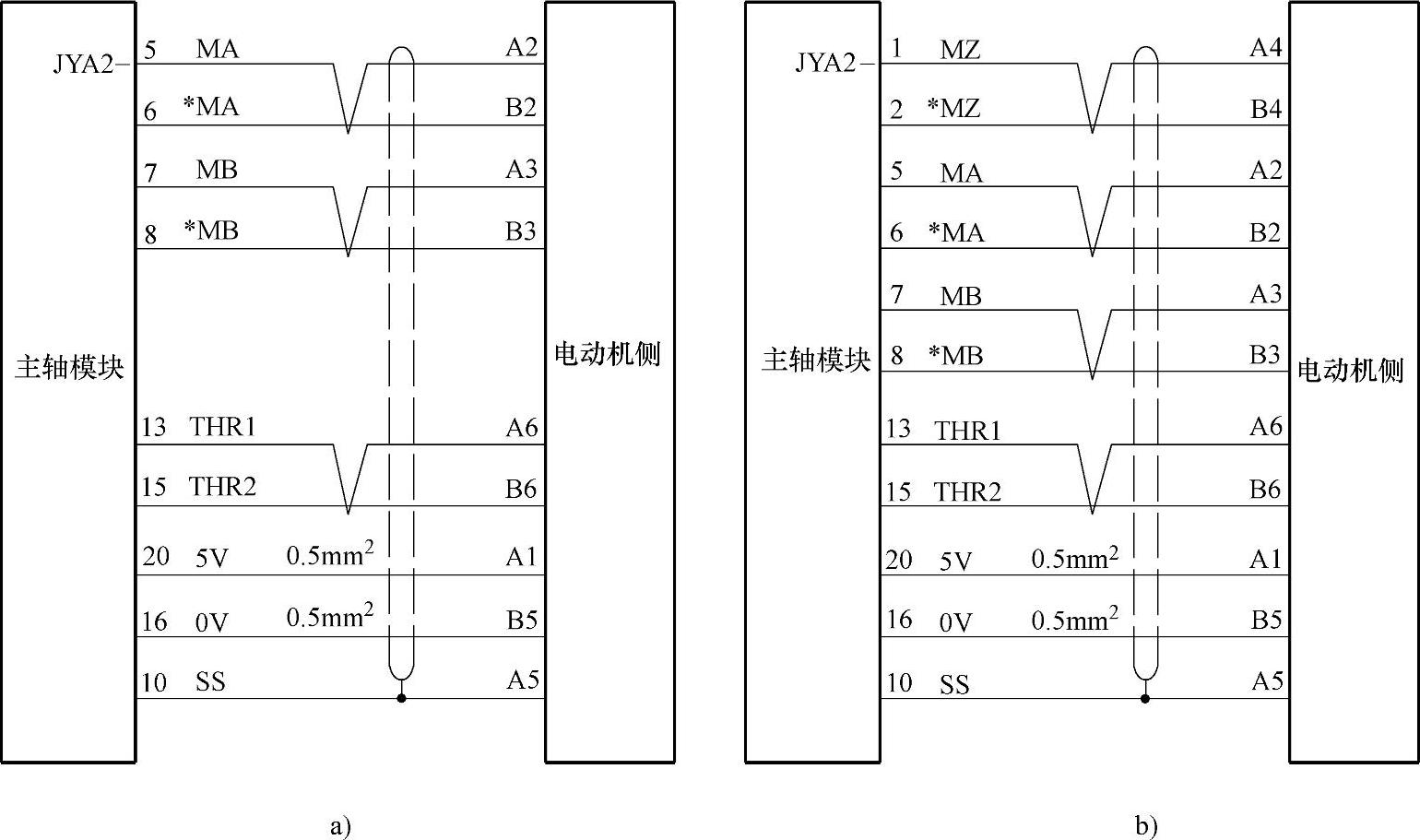
图7.4-14 内置编码器连接
a)Mi编码器 b)MZi编码器
4.外置检测器件连接
外置检测器件一般用于主轴位置控制,A型单传感器输入主轴模块可通过连接器JYA3连接外置方波输出编码器、磁传感器;B型双传感器输入的主轴模块可使用连接器JYA3或JYA4,连接外置编码器、磁传感器或正弦波输出编码器。
如主轴仅需要进行定向准停控制,可连使用接近开关等磁性检测元件,作为位置检测输入。当主轴需要位置控制时,可根据传动系统结构,选择图7.4-15所示的4种常用编码器配置方案。
主轴模块可连接的外置式编码器有如下4类,其连接要求分别如下。
α型编码器:1024P/r方波脉冲输出编码器。
αS型编码器:1024λ/r正弦波输出编码器。
BZi型编码器:128~512λ/r正弦波输出、无前置放大器的分离型磁性编码器。
CZi型编码器:512~1024λ/r正弦波输出、带前置放大器的分离型磁性编码器。(https://www.xing528.com)
①方波编码器连接。A型或B型主轴模块的JYA3可连接传统的1024P/r方波脉冲输出α型光电编码器或接近开关,用于定向准停和主轴定位控制。JYA3与α型方波脉冲输出编码器的连接要求如图7.4-16所示。
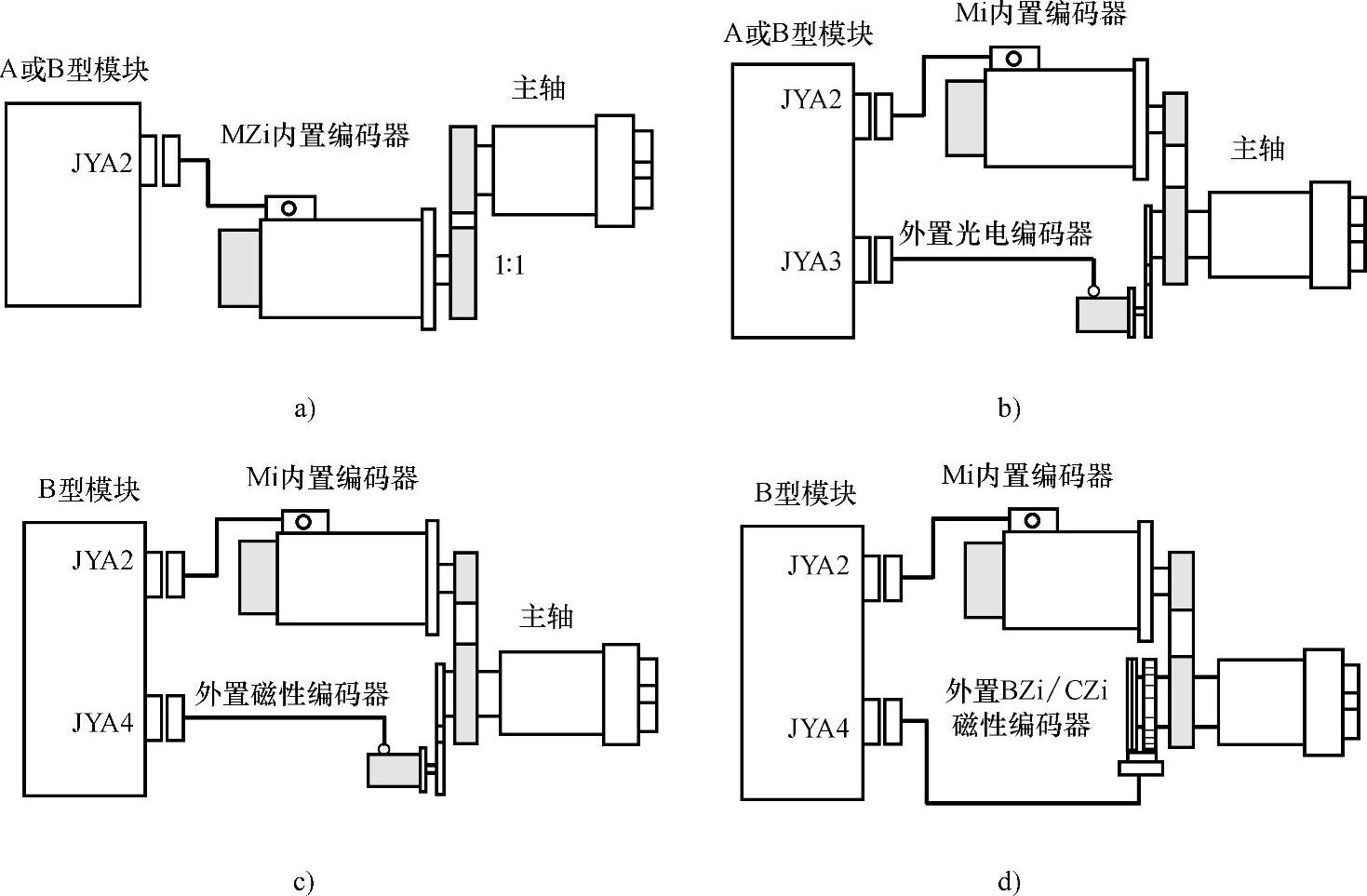
图7.4-15 主轴编码器配置
a)使用内置编码器 b)外置光电编码器 c)外置磁性编码器 d)外置BZi/CZi编码器
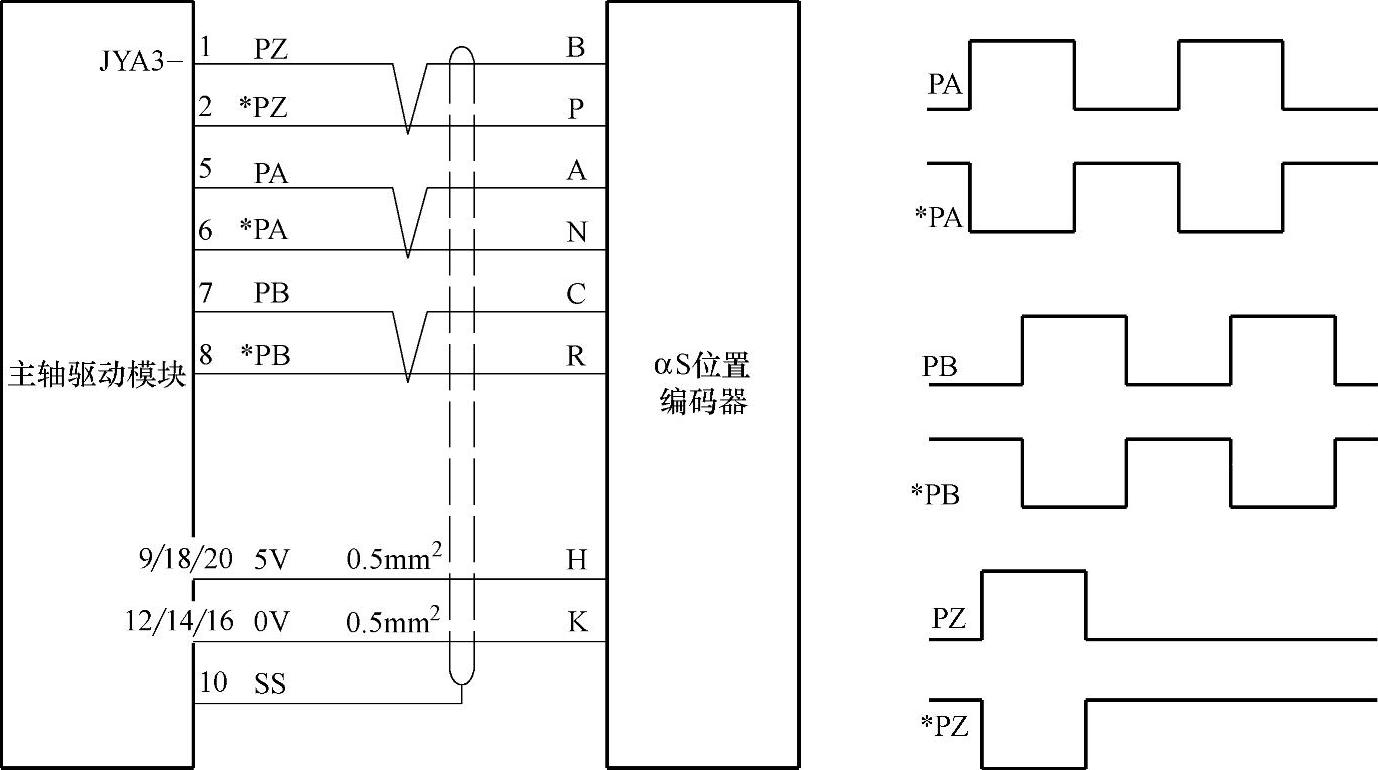
图7.4-16 α型编码器的连接
②磁传感器连接。如主轴仅需要进行定向准停控制,JYA3也可连接接近开关等磁性检测元件,作为位置检测输入。接近开关可以连接到JYA3上,其连接要求如图7.4-17所示。
主轴模块对磁性检测元件的技术参数要求如下。
输出形式:NPN或PNP晶体管集电极开路型输出。
开关频率:≥400Hz。
信号输出电压:DC24V±1.5V。
输出驱动电流:≥16mA。
关断漏电流:≤1.5mA。
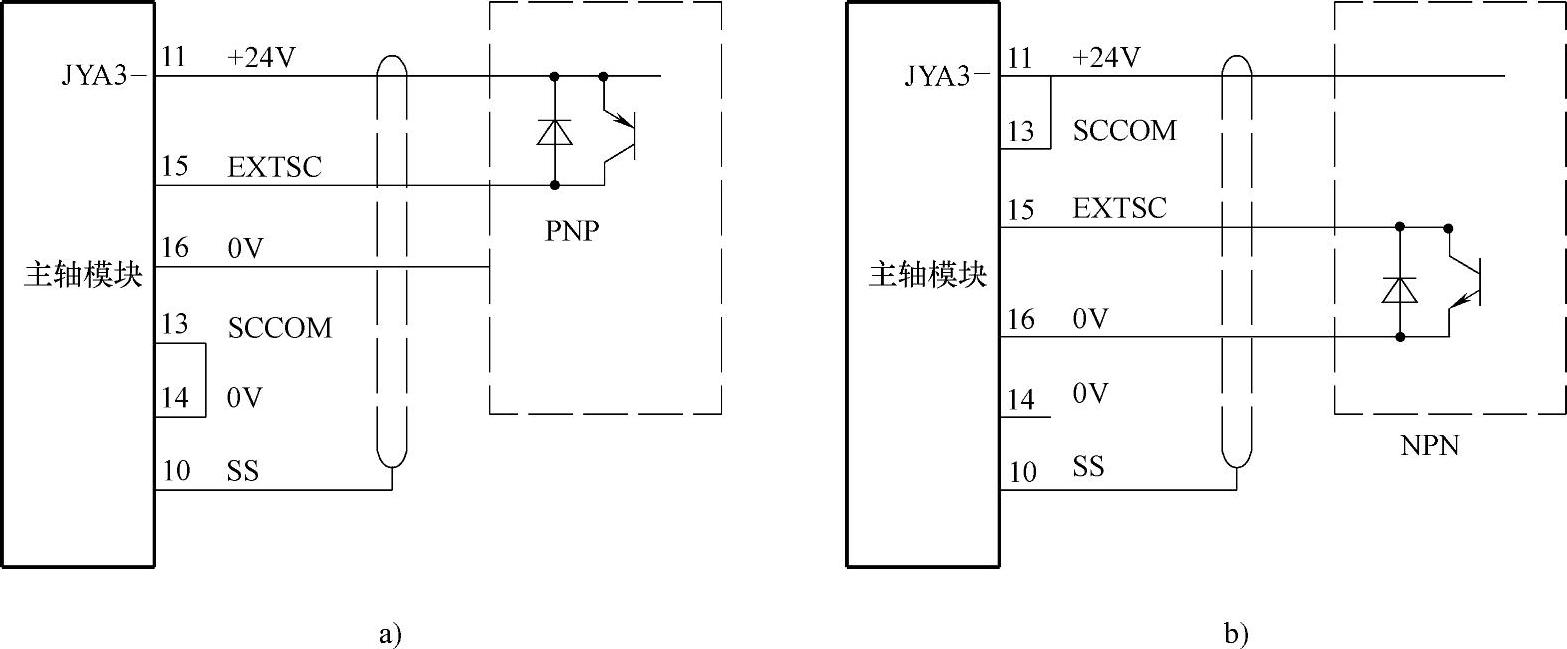
图7.4-17 接近开关的连接
a)PNP集电极开路型输出 b)NPN集电极开路型输出
③正弦波编码器连接。JYA4为B型主轴模块的扩展接口,可连接外置的正弦波输出αS型、BZi型、CZi型编码器。JYA4与αS、BZi、CZi正弦波输出编码器的连接要求如图7.4-18所示,BZi分离型磁性编码器无前置放大器,编码器输出和主轴模块直接连接;CZi分离型磁性编码器带有前置放大器,编码器需要与前置放大器连接,前置放大器的输出连接到主轴模块的JAY4上。
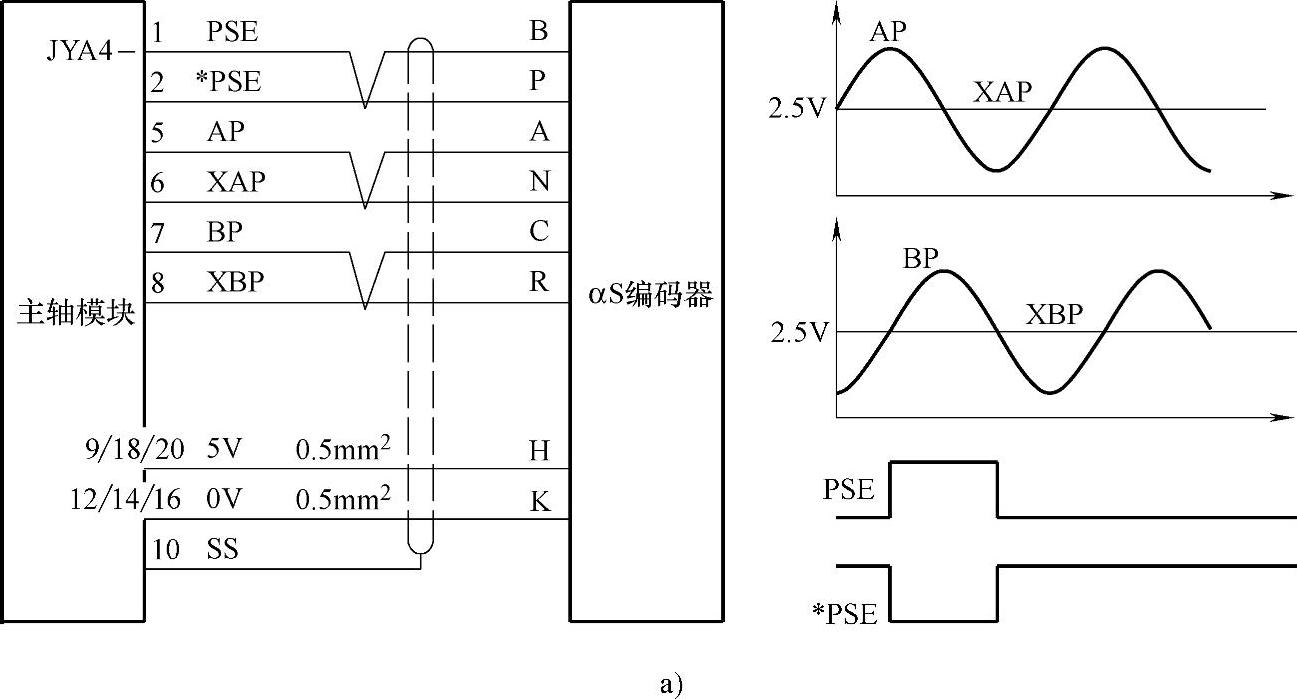
图7.4-18 正弦波编码器的连接
a)αS编码器
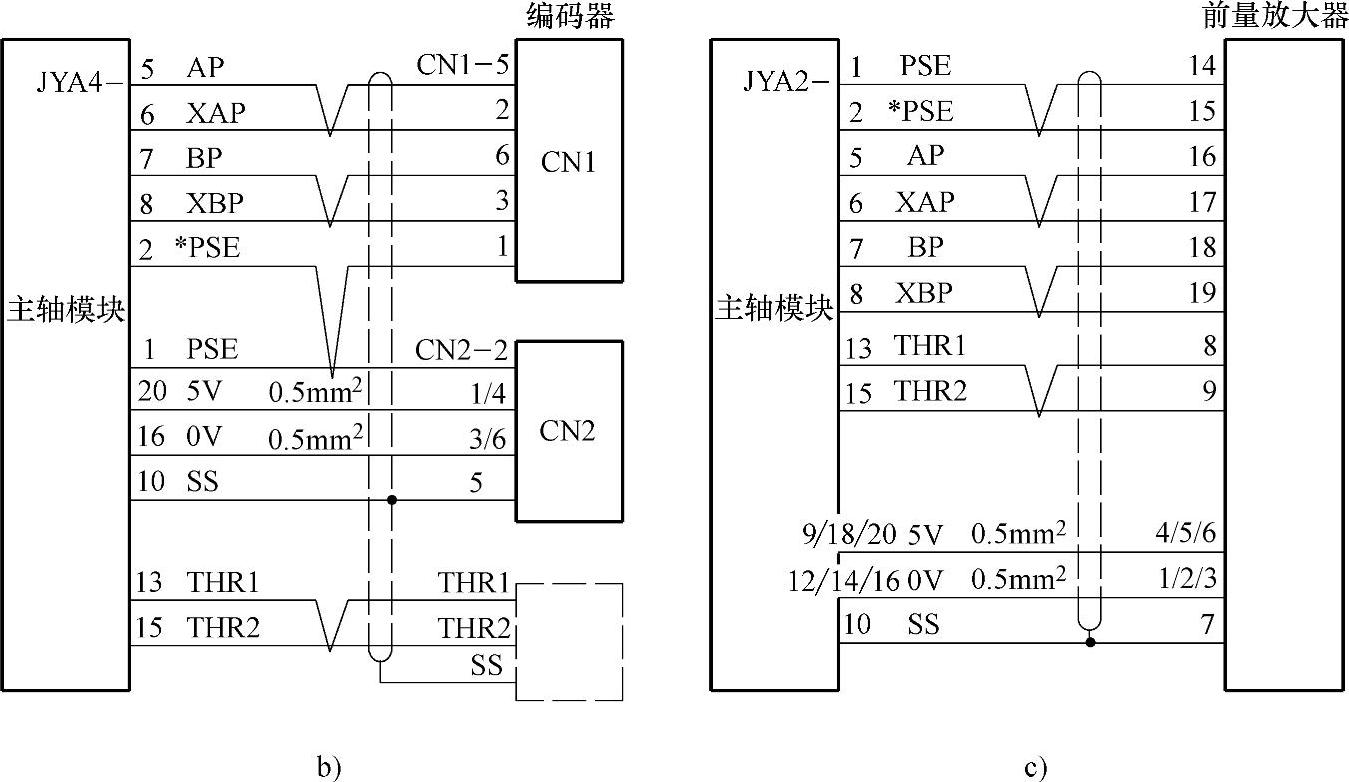
图7.4-18 正弦波编码器的连接(续)
b)BZi编码器 c)CZi编码器
5.操作显示信号连接
主轴模块的JY1连接器可用于主轴外部操作和显示连接,它可以连接主轴倍率调整电位器、主轴转速表(SM)、主轴负载表(LM)。JY1的连接要求见图7.4-19所示。
主轴倍率调整电位器可对主轴转速进行倍率调整,JY1的连接端OVR1为调整电压输出,OVR2为调整电压输入,当OVR1与OVR2端的电压相等时,主轴倍率为100%。倍率调整电位器的阻值范围可以是2~10kΩ。主轴模块的倍率调整电位器是直接对主轴驱动器内部速度给定的调整,而机床操作面板上的主轴倍率调整的是CNC输出的速度给定值,两者可同时使用,最终主轴转速倍率将是两者的乘积。
主轴转速显示输出为DC0~10V模拟电压,在整个转速范围,输出电压线性变化,转速显示的精度为±3%。
主轴负载显示输出为DC0~10V模拟电压,显示精度为±15%。负载显示输出一般用于主轴功率显示,其输出电压根据电动机规格而不同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。