



由于机构中的高副可以用低副替代,且一个移动副与一个转动副提供的约束数相同,因此,在讨论运动链的组合分类时只讨论含有转动副的平面运动链。设运动链(机构中包含机架在内)的总构件数为N,则活动构件数为n=N-1,转动副的个数为p,机构的自由度为F,则得机构的自由度计算公式
F=3n-2p=3(N-1)-2p (3-1)
由式(3-1)得

由构件和运动副所组成的独立封闭系统称为运动链的环。若运动链的环数以L表示,则运动链的环数计算公式为
L=1+p-N (3-3)
由于N,p,L均为整数,故可分别计算出F=1和F=2时的N,p以及L间的组合并列于表3-1中。
设二、三、四元连杆的个数用N2、N3、N4表示,可写出下式:
N=N2+N3+N4 (3-4)
由于计算各元连杆运动副数时均重复一次,故运动链的总运动副数等于各元连杆总运动副的一半,即
2p=2N2+3N3+4N4 (3-5)(https://www.xing528.com)
将式(3-4)、式(3-5)代入式(3-1)得
F=N2-N4-3 (3-6)
由式(3-4)减去式(3-6)得
N3+2N4=N-(F+3) (3-7)
由式(3-4)及式(3-7)可以计算出运动链中各元连杆的组合关系。例如,F=1时六杆运动链中二、三、四元六杆如何搭配组合的问题已知N=6、p=7、L=2。由式(3-7)得N3+2N4=2。此时只有两种情况:①N4=1,N3=0,N2=5;②N4=0,N3=2,N2=4。运动链中二、三、四元连杆的个数和运动链的环数这些决定运动链结构特征的参数确定了运动链的构型,因此把[pN2N3N4L]的数值称为运动链特征值。以上计算的F=1的六杆运动链两种构型的特征值分别为[pN2N3N4L]=75012和74202。按此法计算的各种运动链的特征值列于表3-1中。
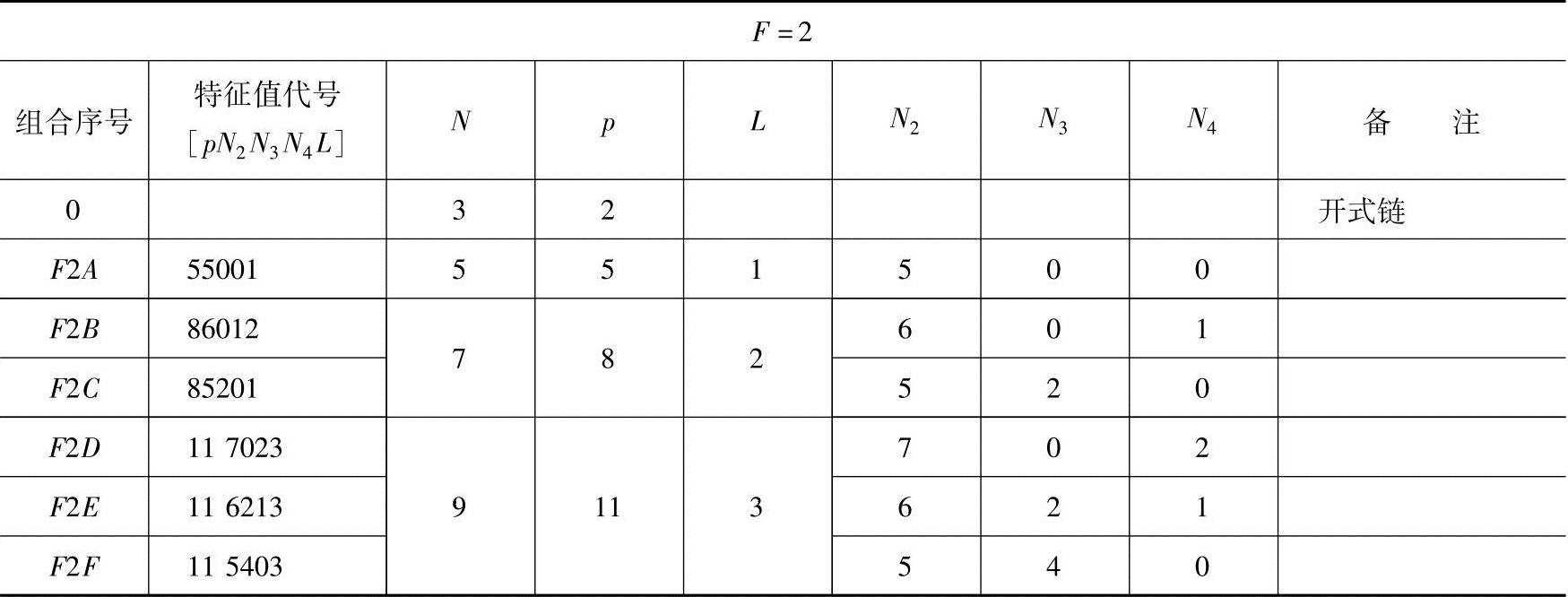
应该指出,由于机构的构件数越少,机构的结构也越简单,所以在实际机构设计中,其构件总数一般不应超过8~9个。由表3-1、表3-2知,F=1和F=2的运动链其各元连杆的组合均为7类。
表3-1 F=1运动链特征值参数表
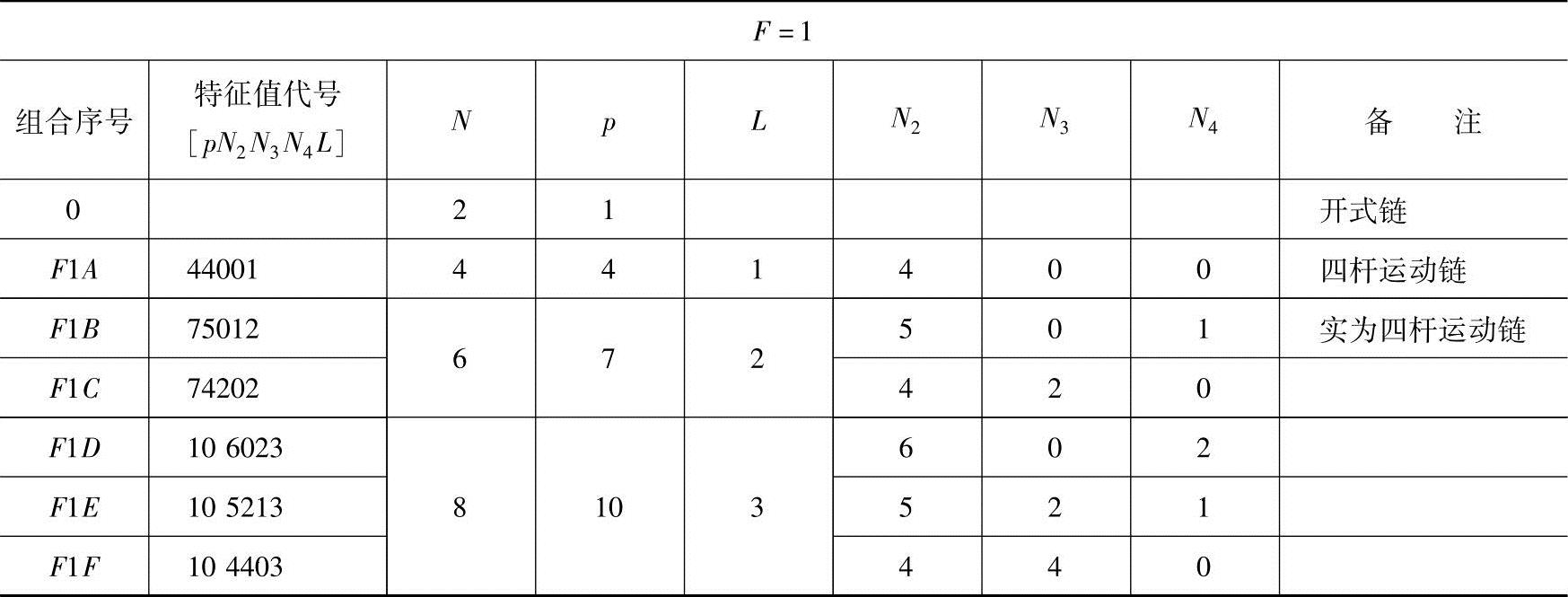
表3-2 F=2运动链特征值参数表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。