



本节将讨论波浪能应用系统中最常用的与旋转发电机相耦合的几种波浪能涡轮机。这些装置一般都安装在岸线的固定结构之内。由于它们是固定的,因此它们能够为再次作用于其上的波浪作用力提供一种合适的参考,从而获得较高的转换效率。
4.3.4.1 “威尔斯”气动涡轮机
威尔斯涡轮机是一种低压气动涡轮机,常用于OWC应用系统当中。威尔斯涡轮机无需使用昂贵而且精密的阀门系统来修正气流方向。
OWC用作岸式结构,而且它们有固定的参考框架来利用波浪的作用力。OWC本质上是共振装置,它们靠响应波浪的运动来工作[22]。水柱内的水压因入射波峰而增加。水柱内部的水位上升,进而将空气从柱顶挤出[22]。这股气流会带动气动涡轮机旋转,然后当波浪回撤到海洋中时,气流再次反向流入柱体之内。
OWC使用威尔斯涡轮机,这是一种自整流气动涡轮机(见图4.19[22]),它不需要额外的整流阀。威尔斯涡轮机可以从进出柱体的气流中提取能量。这些威尔斯涡轮机阻力较小,可以在几百转的高转速下驱动,而无需齿轮箱。威尔斯涡轮机转子的效率在气压相当于2~3m水柱高时达到最大值,2~3m为典型的海浪波高度。
两个方向上的气流在叶片上产生前向推动力。不过,即使气流是双向的,水轮机也是单向旋转的。
图4.20为驱动波浪能系统发电机的威尔斯涡轮机结构图。该涡轮机模型的输入是柱体内压力增加产生的空气流速,而其输出则是驱动发电机的机械转矩[23,24]。
该模型的输出机械转矩为

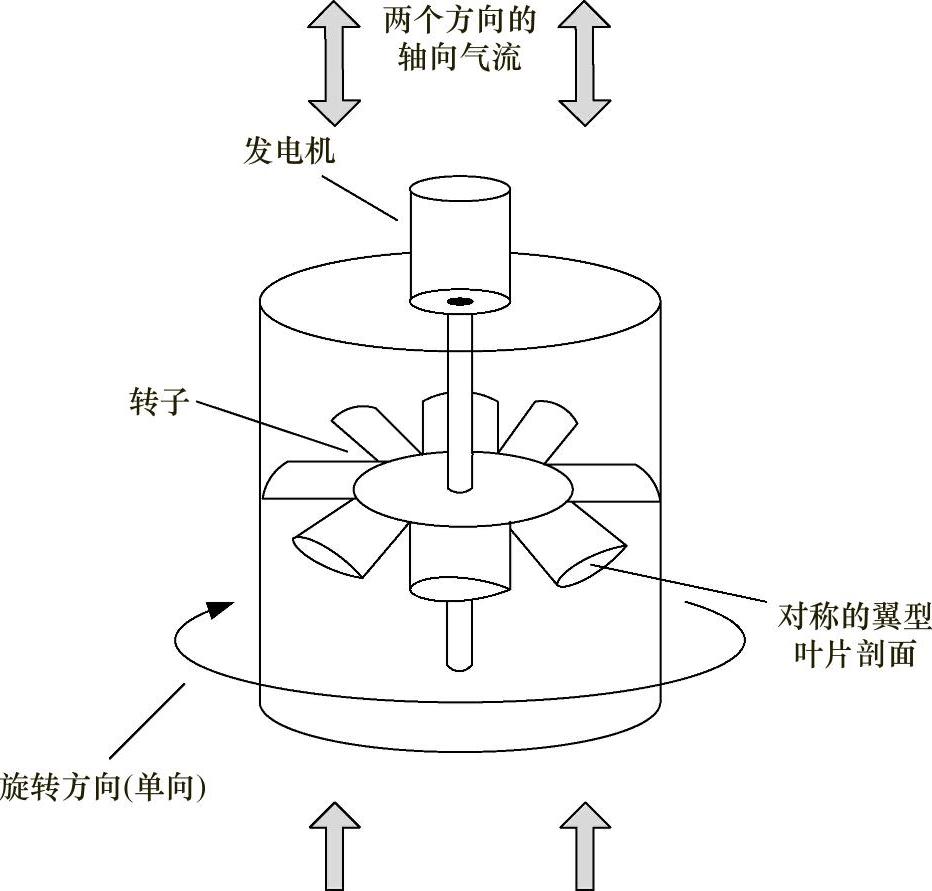
图4.19 威尔斯涡轮机
式中 Pshaft——涡轮机轴功率;
ωm——涡轮机轴角速度。
轴功率Pshaft可以根据下式求出:

式中 η和Pair——涡轮机和空气能量的效率。涡轮机效率是流量系数Φ的函数,涡轮机效率与流量系数的函数关系如图4.21所示。
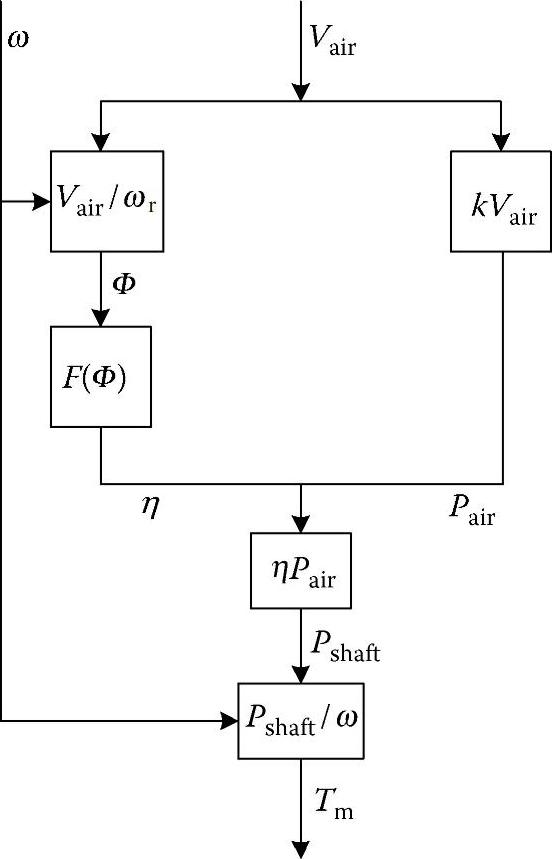
图4.20 威尔斯涡轮机框图
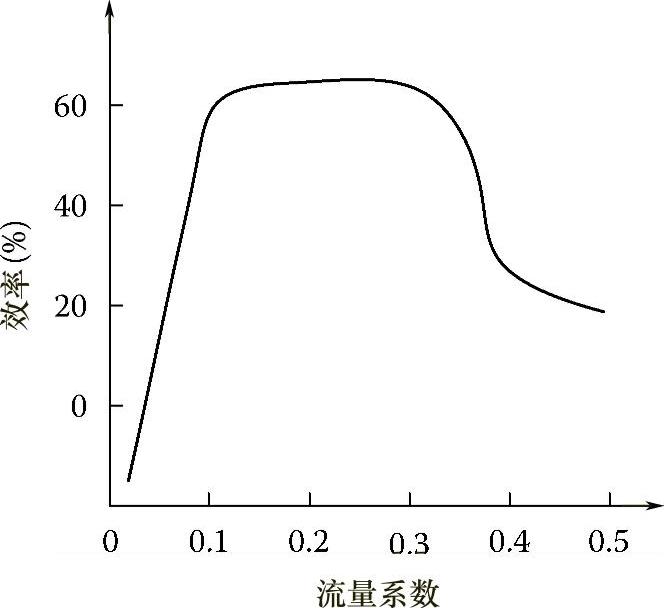
图4.21 作为流量系数的函数的涡轮机效率
空气能量与空气流速成正比,即
Pair=kVair (4.11)
式中 k比例常数。
流量系数Φ可确定为

式中 r——涡轮半径。
涡轮机输出转矩具有脉动形式。换句话说,转矩输出波形是随着气流而振荡的。由于涡轮机输入空气流速与波长和波浪高度有关,因此与高惯性飞轮相耦合可以使涡轮机输出转矩更加平稳。飞轮位置沿着水轮机和感应发电机之间的轴而分布[23,24]。
图4.20给出的威尔斯涡轮机框图可以利用MATLAB和Simulink来实现。威尔斯涡轮机脉动波形的一个实例如图4.22所示,其中,惯量J=0.02kgm2,能量转换比例常数k=0.5,涡轮机半径r=1m,这是一种小型威尔斯涡轮机。
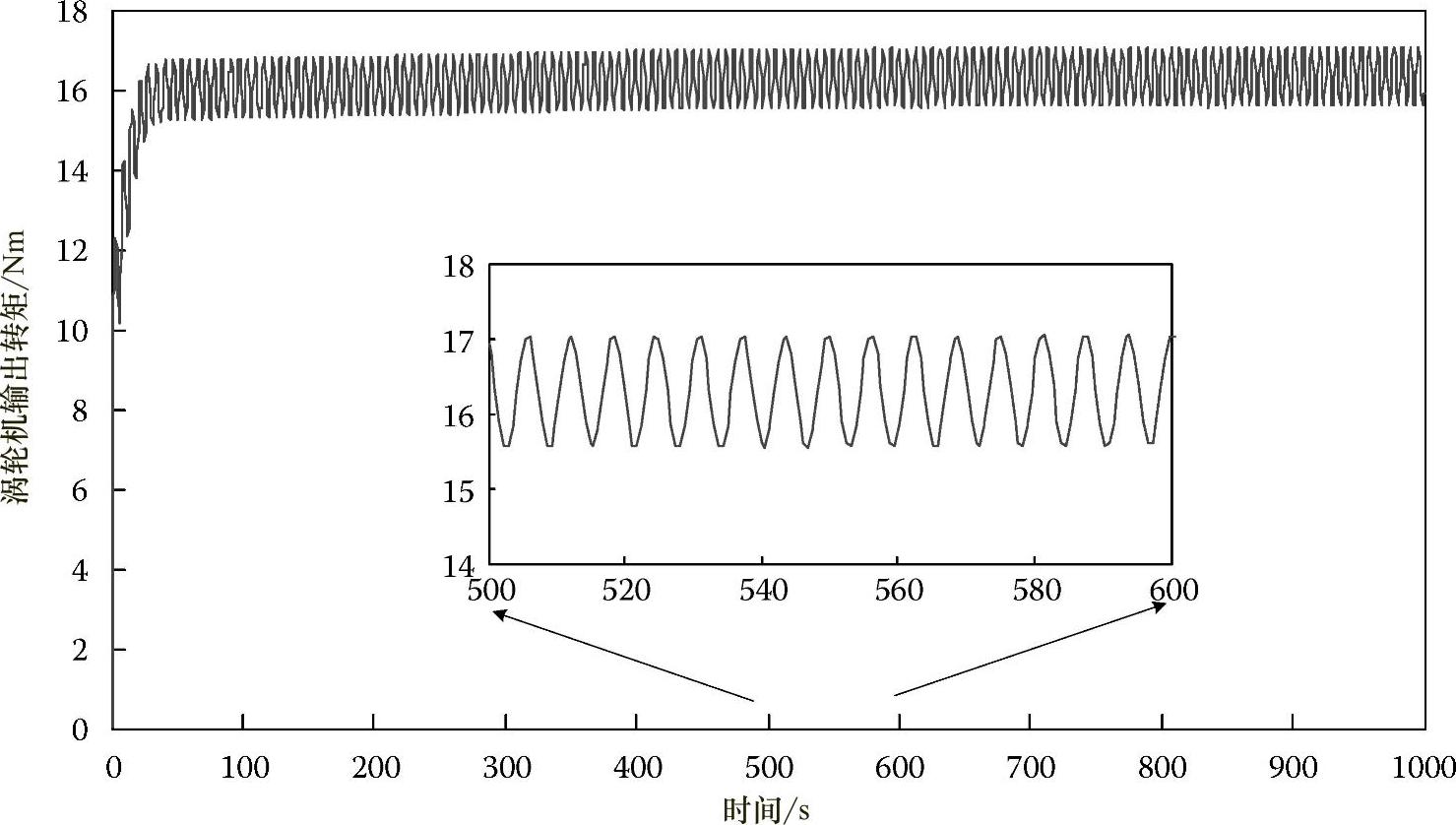
图4.22 威尔斯涡轮机在正弦输入流量下的输出转矩波形
4.3.4.2 用于WEC的自桨距控制叶片涡轮机
本节将介绍自桨距控制叶片涡轮机的工作原理、特性与行为[25]。图4.23解释了使用自桨距控制叶片的涡轮机的工作原理。这种涡轮机适用于WEC,它可以替代威尔斯涡轮机使用。
涡轮机叶片可以在两个预定义的角度±γ之间振荡,它们通过一个靠近叶片进水边的枢轴设定在轮毂之上[25]。当机翼以对着枢轴的攻角进行纵摇(俯仰)运动M时,涡轮机叶片可以自行翻转。它们可以根据流向进行+γ或-γ翻转。因此,涡轮机可以通过较低的转速获得较高的转矩和工作效率。
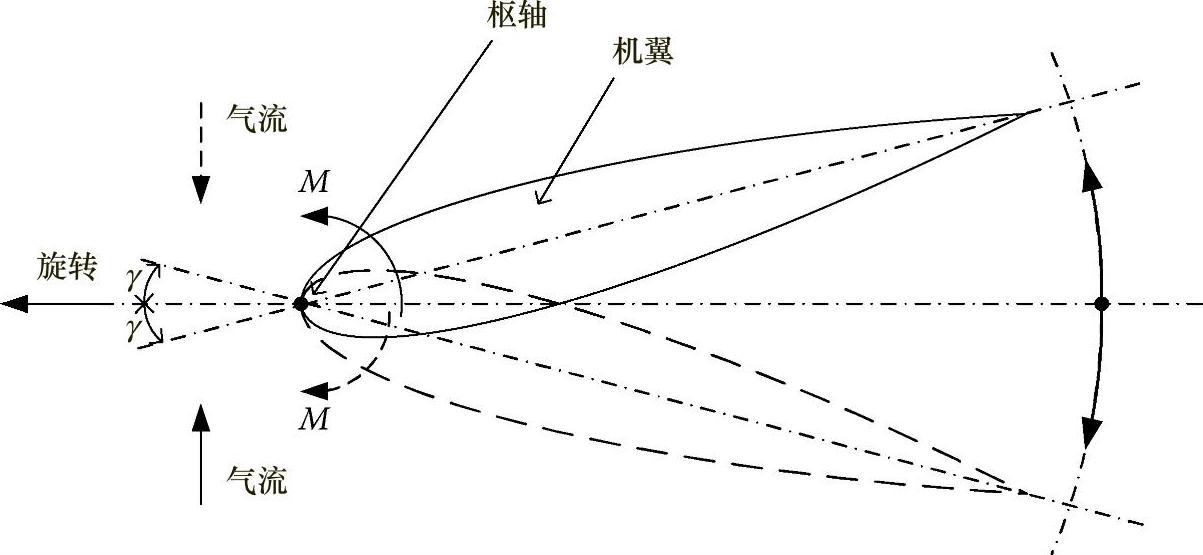
图4.23 使用WEC自桨距控制叶片的涡轮机
转矩系数CT和输入功率系数CA与流量系数Φ的关系用于评估稳流条件下的涡轮机特性。
这些系数被定义为
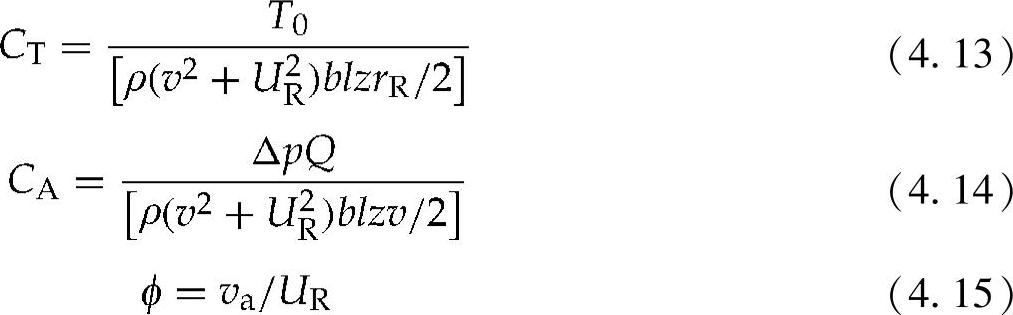
式中 ρ——空气密度;
v——平均轴向流速;
UR——在平均半径(rR)下的圆周速度;
b——转子叶片高度;
l——弦长;
Δp——涡轮机前后总压降;
T0——输出转矩;
z——转子叶片数[25]。
CT-Φ特性随着叶片角度的不同而变化。如果γ在无失速区域增大,那么CT值就会下降。这表明,较大的γ角可以获得更好的起动条件。此外,失速点随着γ增高,无负载条件下的流量系数也是如此。输入系数CA在γ=0比非零γ值时更高,这是由转子的几何形状引起的。如果γ不等于零,CA值在小流量系数时为负。这意味着,在较小的进口角时,转子就像一个风扇。
因此,如果安装角固定,转子的平均性能在振荡流条件下就会下降。由于在相对较小的进口角下转矩变为零,因此使用自桨距控制叶片不可能克服这个问题[25]。图4.24给出了使用自桨距控制叶片的波浪能涡轮机的总体结构图。
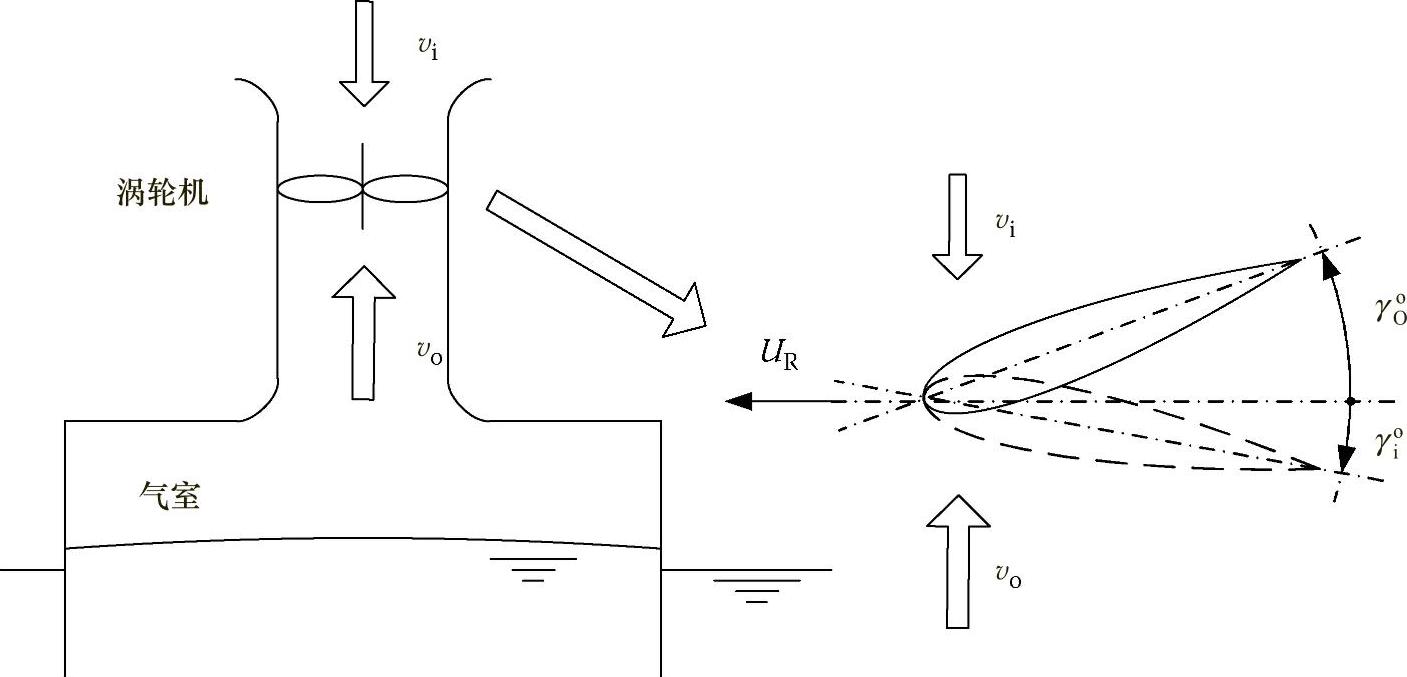
图4.24 使用自桨距控制叶片的波浪能涡轮机总体结构图
此前建造的波浪能发电站表明,在排气期间(比如从气室向外)的轴向流速要比吸入期间更高[26-29]。
因此,根据气流方向,桨距角的最优设置会有所不同。例如,作者调查了真实海况下的安装角对于涡轮机性能的影响[25]。参考文献[30]解释了这种特性的分析过程。
旋转系统的动态行为可以描述为

式中 I——转子的转动惯量;
t——时间;
TL——负载转矩。
对于给定的I、TL和T0值,可以求出式(4.16)的数值解。在开始时,这可以给出涡轮机的起动特性,同时还可以提供渐近边界条件下的运行特性。在渐近边界条件下求解时,涡轮机性能可以计算为平均效率:

式中 η——转子以恒速旋转时,一个波浪周期的估计值;
T——波浪周期;
T0——输出转矩;
ω——转子角速度;
Q——流量(m3/s)。
在参考文献[25]中,给出了不同的桨距角变化对于涡轮机性能(平均效率)的影响。
4.3.4.3 用于WEC的卡普兰水轮机
在本节中,将介绍卡普兰水轮机的结构和工作原理。卡普兰水轮机适用于潮汐和波浪能采集,以及锥形通道和其他水电应用场合。这些水轮机是带有用于调速和转矩控制的可调叶片角轴流桨式水轮机。
当流体流过卡普兰水轮机时,其压力会发生变化,而其能量则转换为机械能,这使得该水轮机成为向心反击式水轮机。卡普兰水轮机的效率约为90%,不过在极低的水头条件下,效率可能会降低。入水口是围绕水轮机导叶放置的一根管道。海水直接切向通过导叶,通过螺旋桨叶式转轮上面的蜗壳推动涡轮旋转。出水口则是一根用于让海水减速并恢复其动能的尾水管。
该水轮机不需要任何最小水流量,因为尾水管里面充满了水。较高的水轮机位置可能会增加吸入量,不过这样就可能会导致水轮机气蚀更快。
双调式水轮机具有可调节的转轮叶片,因为双重调节包括导叶开度机转轮叶片的角度控制。通过调节叶片角和导叶开度可以在变化的水头、流量或者负载条件下,实现水轮机以最大效率运行。实际的水头值和导叶开度用于确定转轮叶片角。为了以最大效率来运行水轮机,需要指定组合相关性yR(yW,Hb),而不需要考虑具体工况[31]。yR为对应于转轮叶片角度的转轮叶片伺服电动机的活塞位置,yW为对应于导叶开度的导叶伺服电动机的活塞位置,Hb为毛水头直径(m)。这种关系由组合器(Combinator)(凸轮)提供,在水轮机控制系统中称为专用装置。
水电能量转换系统由一个水轮机、一个调速器和一台发电机组成,图4.25所示为带有双调式水轮机的水电能量转换系统[31]。
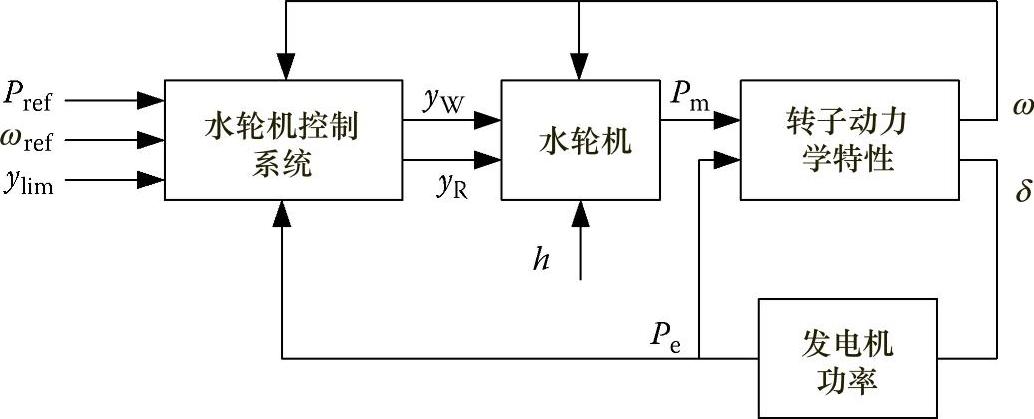
图4.25 带有控制系统与转子动力学的双调式水轮机模型
双调式水轮机用于低水头水电站,比如使用旋转水轮机的WEC电站,该水轮机由来自带有短管道水库的水流来驱动。因此,水和管道可视为不可压缩的,而且非弹性水柱方程可写为

式中 q和q0——水轮机流量及其初始值(p.u.);
h和h0——水轮机水头及其初始值(p.u.);
TW——海水的开始时间(s);
s——拉普拉斯算子。
驱动发电机的涡轮在耦合点产生机械转矩,它可以根据下式计算:

式中m——水轮机转矩(p.u.);
ηt——水轮机效率;
ω——转速(p.u.)。
水头、转速、导叶与转轮叶片为影响水轮机流量和效率的参数:
 (https://www.xing528.com)
(https://www.xing528.com)
因此,水轮机械转矩也受到这4个变量的影响:

水轮机的动态特性定义了这些复杂的非线性函数。水轮机转速约为一个固定值,特别是在能量系统并网时。如果忽略了转速变化,水轮机流量和效率特性可以使用转速独立表示[31]为

这些特性定义用于hchar,这是指定的水轮机水头。对于任意h值,根据q(yW,yR)确定的水轮机流量可以重新计算为

根据水头的变化,涡轮机效率可能会有所不同,具体的水头hchar的效率特性可以计算为

使用式(4.23)和式(4.24)的流量和效率函数可以建立双调式卡普兰水轮机的非线性模型。卡普兰水轮机框图如图4.26所示[31]。
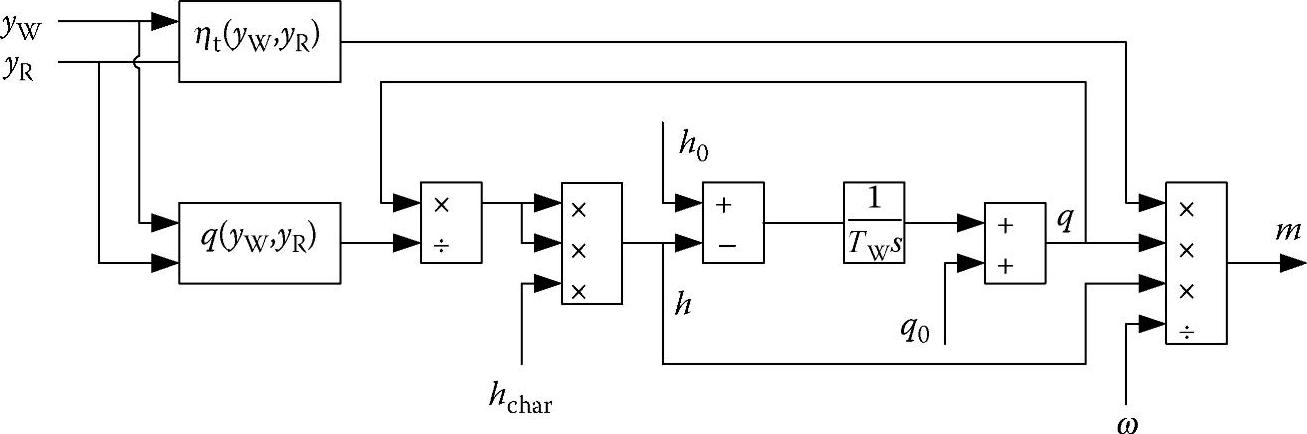
图4.26 非线性水轮机模型
4.3.4.4 用于WEC的其他类型水轮机
本节将综述用于WEC应用系统的其他各类水轮机。这些水轮机如下:
1)带有导向叶片的普莱恩(Biplane)威尔斯涡轮机(BWGV),如图4.27所示[32]。
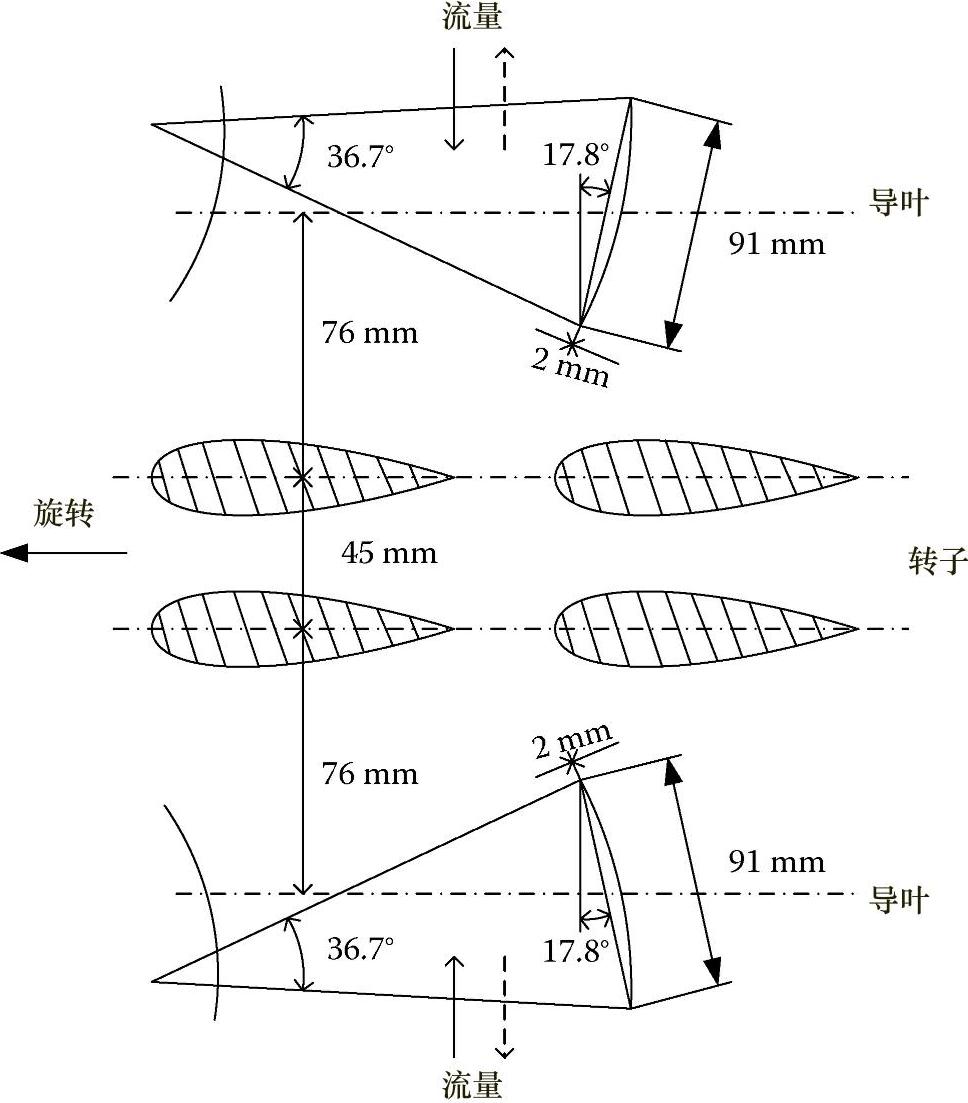
图4.27 带有导向叶片的普莱恩威尔斯涡轮机
2)带有自桨距控制导向叶片的冲击式水轮机(ISGV),如图4.28所示[33]。
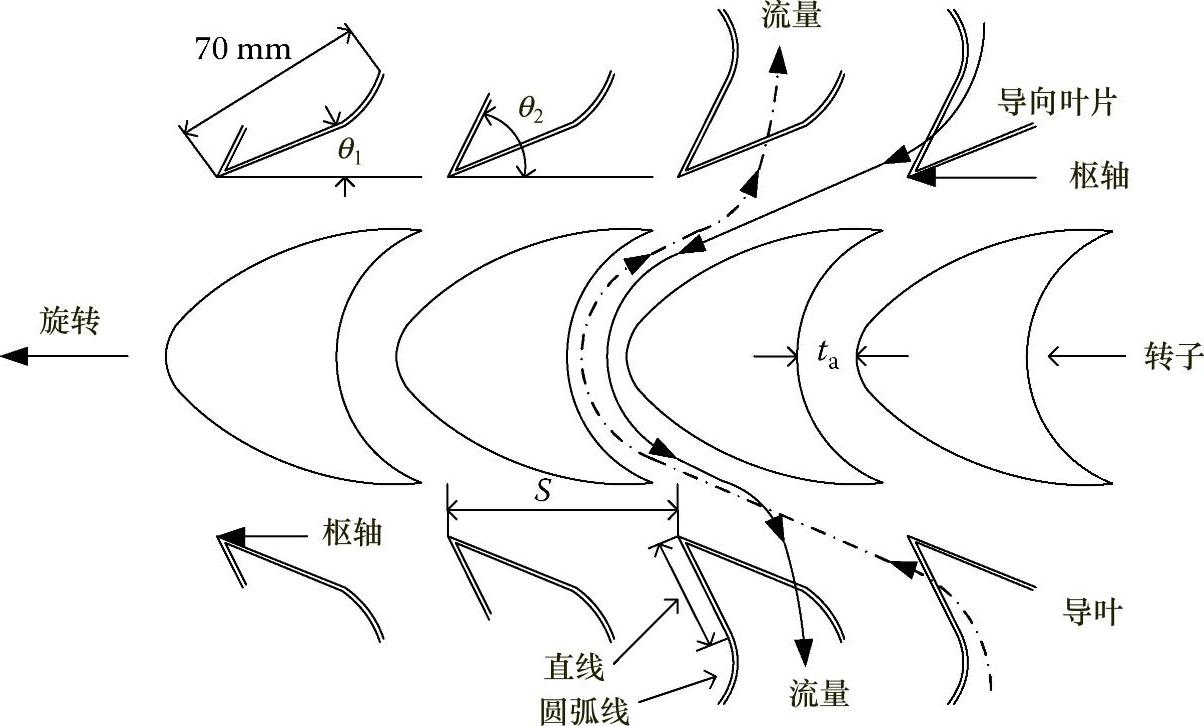
图4.28 带有运动链系的自桨距控制导向叶片的ISGV
3)带有固定导向叶片的冲击式水轮机(IFGV),如图4.29所示[34]。
不同的波浪能水轮机在“用于波浪能转换的水轮机性能比较”[35]中经过实验测试。在本研究中,试验台包括一个沉降室、一个大型活塞缸,测试区直径为3m,带有一个钟口状的进水口与一个扩散管出水口。
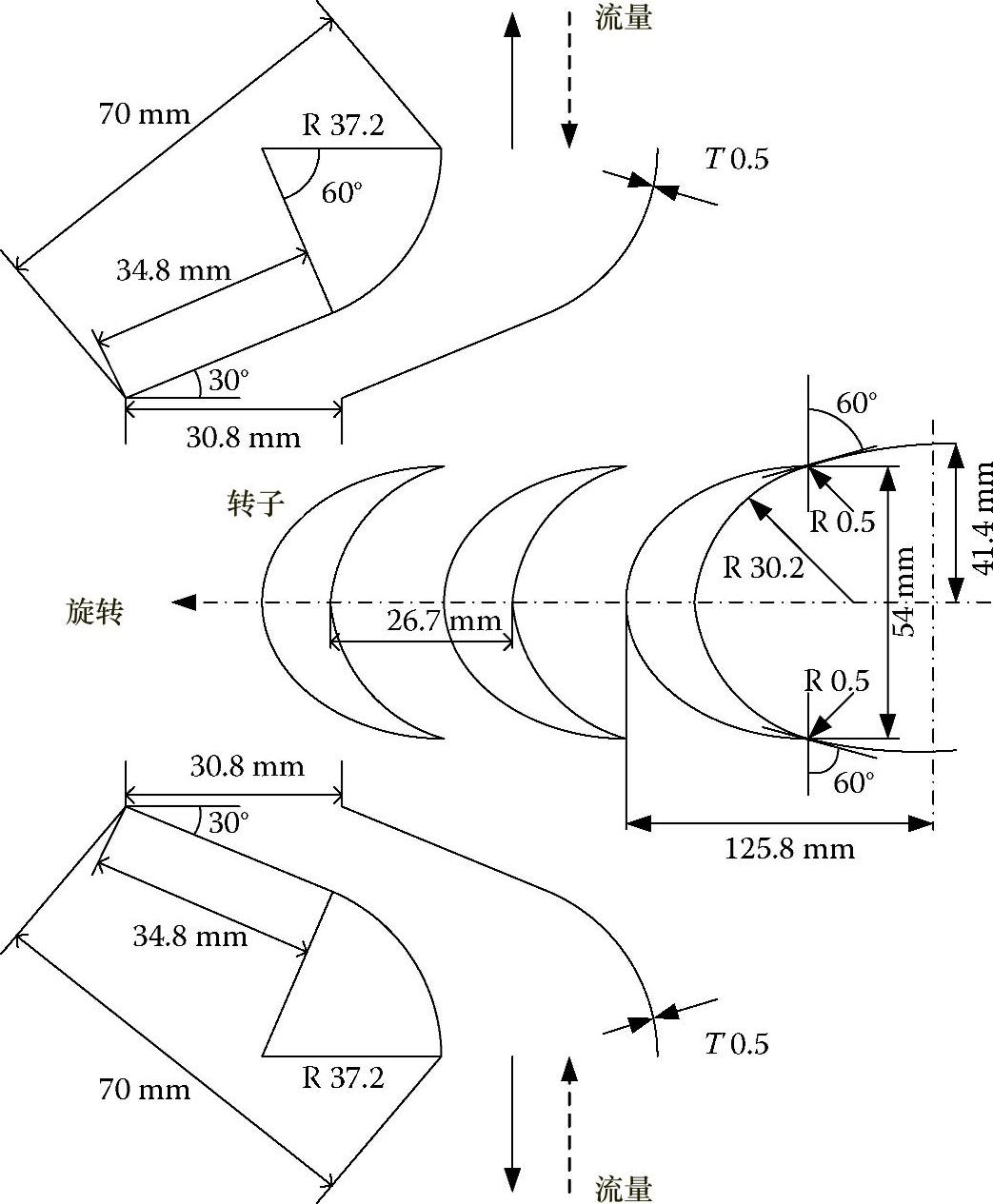
图4.29 带有固定导向叶片的冲击式水轮机
试验段中心放置了一个轮毂比为0.7的水轮机转子。然后,在稳定状态恒定转速下测试水轮机转子。水轮机性能通过水轮机角速度ω、水轮机输出转矩T0、流量Q和气室内外之间的总压降Δp来评估。应当指出的是,这些水轮机都是自起动的[35]。
在实验测试中使用的水轮机规格如下:
1)BWGA:AR=0.5,lr=90mm,σrR=0.45,σgR=1.25。
2)ISGV:ta/St=0.4,lr=54mm,γ=60°,σrR=2.02,σgR=2.27,θ1=17°,θ2=72.5°,λ=-7.5°。
3)IFGV:ta/Sr=0.4,lr=54mm,γ=60°,σrR=2.02,σgR=2.27,θ=30°,λ=-7.5°。
其中,AR为高宽比,lr为转子弦长,σ为稠密度,ta为rR处的流道宽度,SR为rR处的转子叶片空间,γ为用于冲击式水轮机转子的叶片进口角,θ为导向叶片安装角,λ为扫掠角。
采用转矩系数CT、输入功率系数CA和流量系数ϕ,对水轮机性能评价如下[35]:

式中 T0——输出转矩;
ρa——空气密度;
b——转子叶片高度;
lr——转子弦长;
w——相对流入速度;
z——转子叶片数;
rR——平均半径;
Δp——沉降室和大气之间的总压降;
va——平均轴向流速;
UR——rR处的圆周速度。
根据这些水轮机的转矩系数与流量系数特性,转子失速将会引起威尔斯型转子CT的快速下降(如BWGV)。对于ISGV和IFGV之类的冲击式转子水轮机,ϕ的增大也会使得CT值增大。而且较大的ϕ区要比其他威尔斯涡轮机的CT值更大。
根据水轮机的CA-ϕ特性,CA值在WTGV中最大,这就意味着由于它的推力更大,气室压力更高,它就可能需要更加频繁地维护轴承。当ISGV和IFGV用作波浪能发电设备时,它们的气室压力会有小幅升高[35]。
可以使用CT-ϕ和CA-ϕ特性来计算水轮机的效率,该效率被定义为

不过,应该指出的是,效率并不是选择WEC最佳水轮机惟一的重要因素。此外,水轮机特性会随着气室的效率而产生变化,该效率是OWC功率和入射波功率之比[35]。由于海浪具有不规则的自然行为,因此OWC产生的气流也是不规则的。因此,弄清楚不规则流量条件下的水轮机特性是非常重要的。不规则的测试波是基于国际船舶结构会议(The International Ship Structure Congress)给出的标准系列,它专门用于不规则波浪行为描述,而且通常用于海洋应用系统[36]。
图4.30所示为一个带有气动涡轮机的WEC系统,它显示了前进的波浪对气室施加压力,带动了气动涡轮机的旋转。
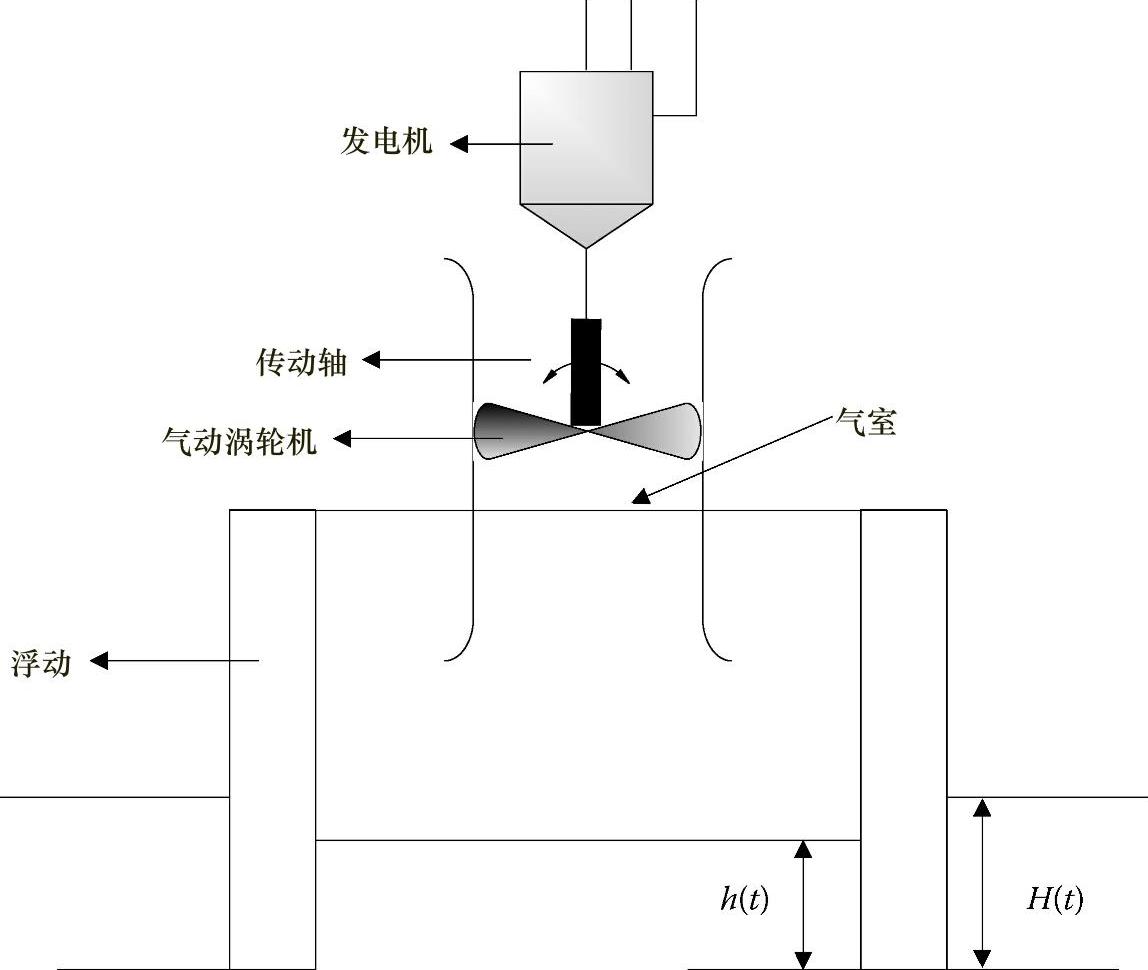
图4.30 气动涡轮机式波浪能发电系统原理图
在这种WEC系统中,入射波的高度和气室中的波浪高度是相互关联的,如下式所示[34]:

式中 ρs——海水密度;
h——气室中的波浪高度;
H——入射波高度;
AC——气室的截面积;
g——重力。
对于给定的转速UR来说,平均轴向流速va=(1/m)(dh/dt),Δp为(dh/dt)的函数。根据从CA-ϕ曲线中提取的压差Δp与(dh/dt)之间的关系,式(4.31)可以改写为[35]

若假定压差 ,则有
,则有

可以使用Runge-Kutta-Gill方法来解这个方程,得到气室中的波浪高度。入射波的能量Wi和OWC的能量Wo可以被定义为
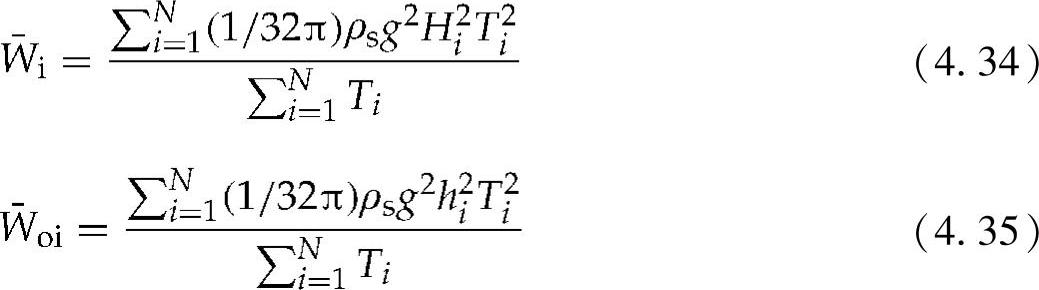
气室效率为OWC能量与入射波能量之比:

如果假定水流不可压缩,轴向流速与波浪高度直接成正比。通过涡轮机的轴向流速可以表示为

在不规则流动条件下,水轮机旋转系统的运动可被描述为

其中
式中 K——周期;
XI——转动惯量;
XL——负载转矩;
σrR——在rR=l.z/(2πrR)时的稠密度。
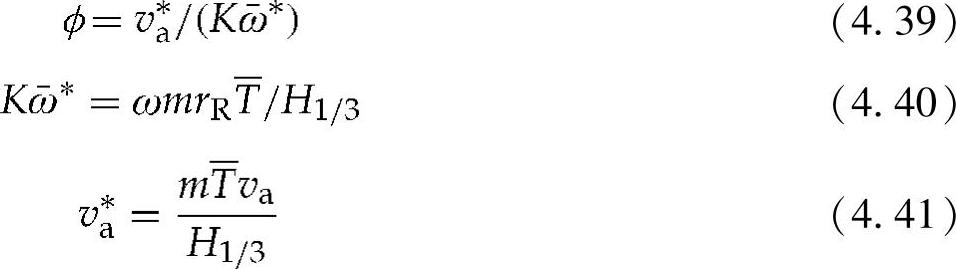
在式(4.38)中,左边第一项和第二项为惯性和负载条件,右边为水轮机产生的转矩。如果给出了转子的负载特性、转矩系数和几何规格,使用式(4.38),水轮机在起点条件下的行为可以表示为 和va*的函数。假设在恒定的转子转速下,可以计算出起动之后的运行特性。平均输出和输入系数Co和Ci可以分别计算得出:
和va*的函数。假设在恒定的转子转速下,可以计算出起动之后的运行特性。平均输出和输入系数Co和Ci可以分别计算得出:


水轮机平均效率计算公式为

可以使用水轮机和气室的效率,将波浪能装置的总体转换效率表示为

不同类型水轮机的转换效率如图4.31所示。与威尔斯水轮机相比,冲击式水轮机的效率更高,处于在1/(Kω*)区。冲击式水轮机不会发生转子失速,因此可以在较宽的流量系数范围内获得转矩。ISGV的缺点是枢轴的维护,不过它的效率更高,甚至比安装了导向叶片的IFGV还要高[35]。因此,冲击式水轮机的运行特性比威尔斯涡轮机更好。
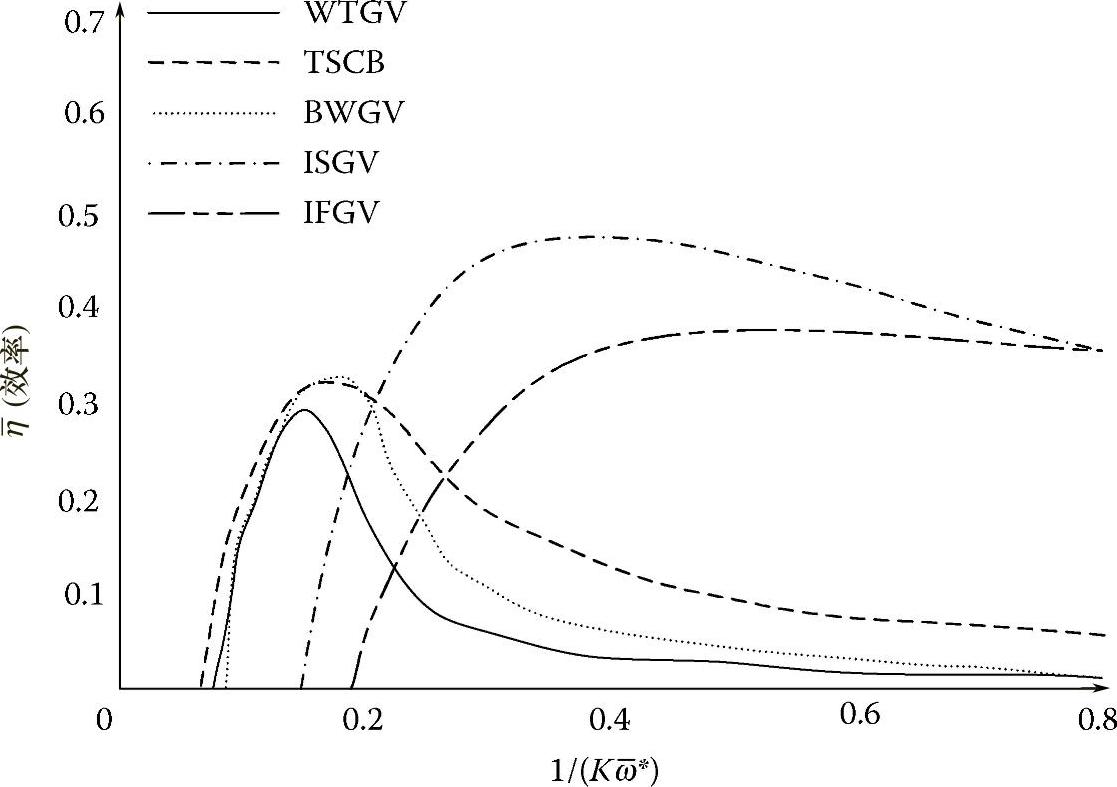
图4.31 使用不同涡轮机的波浪能转换器的效率比较
根据涡轮机的起动特性,冲击式涡轮机的起动只需要很短的时间。这意味着,冲击式涡轮机可以比威尔斯涡轮机起动速度更快,而且在同样的起动时间内产生更多的功率。此外,它的运行速度要比威尔斯涡轮机低。这是由于冲击式涡轮机的转矩系数要高于威尔斯涡轮机的转矩系数,而且在无负载条件下冲击式涡轮机的流量系数较低。因此,由于机械优势和降噪能力,冲击式涡轮机似乎更适合于设计更好的WEC应用系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。