



1.反应式步进电动机的工作原理
图5-2是步进电动机的工作原理图。该图是反应式步进电动机的简易模型。在电动机定子上有A、B、C三对磁极,磁极上绕有线圈,分别称之为A相、B相和C相,而转子则是带齿的铁心,这种步进电动机称为三相步进电动机。步进电动机的工作原理相似于电磁铁作用原理。当某相绕组通电时,定子产生磁场,并与转子形成磁路,如果这时定子齿和转子齿没有对齐,则由于磁力线力图走磁阻最小的路线,而带动转子转动,使定子齿和转子齿对齐,从而实现转动一个角度。
在图中,若首先让A相通电,则转子1、3两齿被磁极A吸住,转子就停留在图5-2a的位置上。
然后,A相断电,B相通电,则磁极A的磁场消失,磁极B的磁场产生,磁极B的磁场把离它最近的2、4齿吸了过去,转子逆时针转过30°,停在图5-2b的位置上。
接着,B相断电,C相通电,C相磁场吸引1、3齿,转子又逆时针转了30°,停止在图5-2c的位置上。
这样按A—B—C—A—B—C的次序通电,步进电动机就一步一步地按逆时针方向转动,每步转的角度均为30°,我们把步进电动机每步转过的角度称为步距角。
如果通电相序改为A—C—B—A—C—B,步进电机将按顺时针方向旋转。
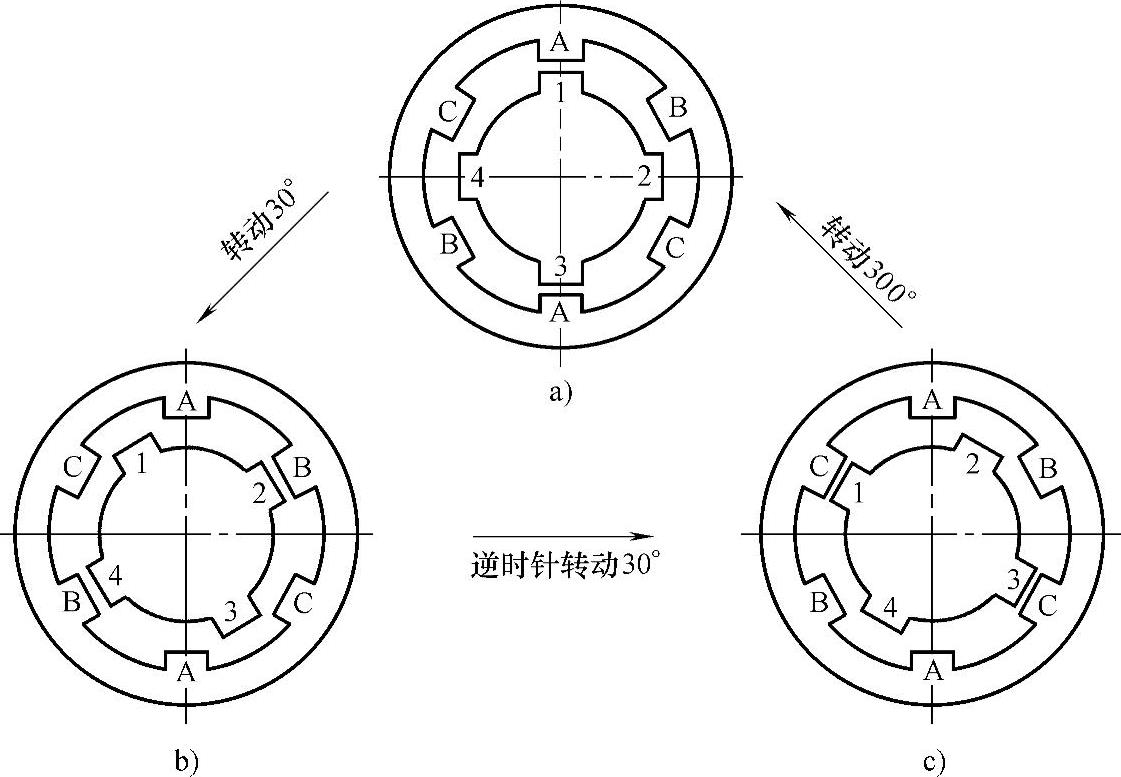
图5-2 步进电动机工作原理图
2.步进电动机的通电方式及步距角
步进电动机每一步所转过的角度称为步距角,用θz表示。步距角的大小与定子相数m,转子齿数z及通电方式有关。
(1)步进电动机有单相轮流通电、双向轮流通电、单双相轮流通电几种通电方式。以三相步进电动机为例,它的通电方式如下:
1)三相单三拍。其通电顺序为A—B—C—A。“三相"是指三相步进电动机,“单"是指每次只有一相绕组通电,“三拍"是指三种通电状态为一个循环。这种方式每次只有一相通电,运行不稳定,很少采用。切换瞬间,转子失去自锁能力,容易失步(即转子转动步数与拍数不相等),在平衡位置也容易产生振荡摇摆。
2)双相双三拍。其通电顺序为AB—BC—CA—AB(https://www.xing528.com)
这种通电方式由于两相同时通电,转子受到的感应力矩大,静态误差小,定位精度高,而且转换时始终有一相通电,可以稳定工作,不易失步。
3)三相六拍。其通电顺序为A—AB—B—BC—C—CA—A
这是单、双相轮流通电的方式,它具有双一拍的特点,且由于通电状态数增加一倍,而使步距角减少一半。
(2)步距角的计算公式
式中 m——步进电动机相数;
z——步进电动机转子齿数;
k——通电方式,k=N/m(N为运行拍数)。
步进电动机的转速取决于脉冲频率,频率越高,转速越高。
式中 θz——步距角(rad);
f——脉冲频率。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。