



1.电动机辨识:p1910=1
电动机辨识的条件:电动机冷态,脱开机械负载。
电动机辨识是指电动机在相对静止的情况下,用p1910=1进行静态测量。主要是完成对异步感应电动机的等效电路的测量、IGBT的通态压降、IGBT的死区时间。电动机辨识修改以下参数:p0350:定子电阻;p0354:转子电阻;p0356:定子漏感;p0358:转子漏感;p0360:主电感;p1825:IGBT的通态电压;p1828…p1830:IGBT的死区时间。
异步电动机的等效电路如7-43所示。
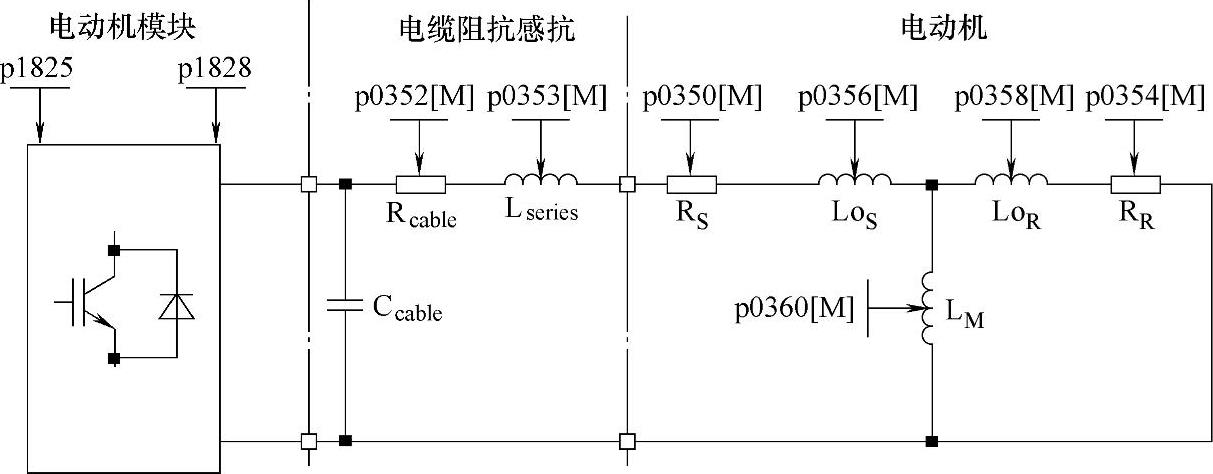
图7-43 异步电动机等效电路
饱和磁化曲线测量p1910=3:饱和磁化曲线可以较为准确地计算电动机在弱磁区的励磁电流,主要测量参数为p0362…p0369,饱和特性曲线如图7-44所示。
电动机辨识步骤:
首先设置p1910=1,CU报警A07991提示已激活电动机辨识;然后起动变频器,自动执行电动机辨识,电动机辨识过程完成后,p1910自动恢复为0。r0047可显示测量电流状态(p1910=3的辨识步骤与P1910=1相同)。
2.旋转测量:p1960
(1)旋转测量P1960=1/2(1=无编码器/2=带编码器)
旋转测量的条件:电动机冷态,抱闸装置打开,脱开机械负载。
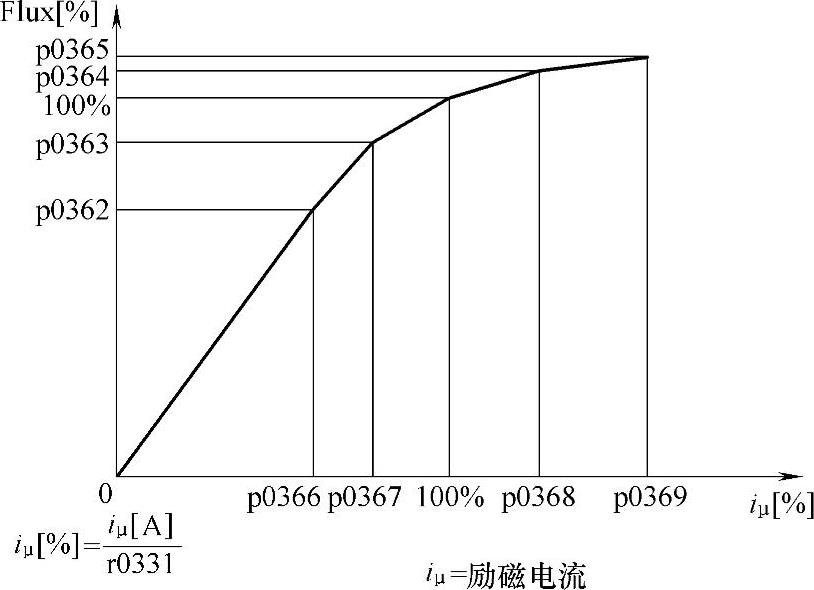
图7-44 饱和特性曲线
对于带编码器应用,先通过V/f方式起动电动机,查看编码器反馈速度R61与设定速度的方向、大小是否一致。(https://www.xing528.com)
旋转测量主要用于对异步感应电动机的励磁电流、磁化曲线以及电动机转动惯量的测量。执行旋转测量时电动机空载转动,此时可以测得更加准确的额定励磁电流和磁化曲线数据。
旋转测量步骤:
电动机空载下,设定p1960=1/2后,CU报警A07980提示已激活旋转测量;然后起动变频器,电动机旋转并自动执行旋转测量,旋转测量完成后电动机停转,p1960自动恢复为0。
(2)速度控制器优化:P1960=3/4(3=无编码器/4=带编码器)
速度控制器优化的条件:电动机冷态,抱闸装置没有闭合,连接机械负载(需确保电动机转动过程中机械系统无危险)。
对于带编码器应用,先通过V/f方式起动电动机,查看编码器反馈速度R61与设定速度的方向、大小是否一致。
电动机连接可以自由旋转的有效负载后,需要用p1960=3(不带编码器)或p1960=4(带编码器)来激活速度控制器优化,该过程可以测量整个系统的转动惯量并优化速度控制器。
注意
在速度控制器优化之前,需要设定p1967动态性能参数。若此参数设置过大会造成运行不稳定和转矩波动较大,因此建议在工艺条件允许的情况下,尽量减小p1967的值,以保证驱动系统在整个调速范围内的稳态精度。
速度控制器优化步骤:
电动机轴端连接可以自由旋转的负载后,设定p1967,p1960=3/4等参数,CU报警A07980提示已激活旋转测量;然后起动变频器,电动机旋转并自动优化速度调节器参数,优化完毕后电动机停转,p1960自动恢复为0。
注意
执行完优化后,需要执行Copy RAM to Rom对参数进行永久保存,并执行一次上载。确保CF卡、RAM和离线项目数据保持一致。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。