



1.描述
在上电后,“捕捉再起动”功能将逆变单元自行切换到一个正在旋转的电动机上。此功能可在带/无编码器运行中激活。
如果有负载继续运行,应通过p1200激活“捕捉再起动”。这样可以避免整个机械装置的负载发生剧烈变化。
如果使用的是异步电动机,必须在执行前等待一段去磁时间。此时会计算内部的去磁时间。此外,也可以在p0347中输入时间。这两个时间中的较大值用作等待时间。
在无编码器运行中,首先搜索当前转速。搜索从最大转速的125%开始。使用永磁同步电动机时,需要使用一个电压监控模块(VSM),详细说明请参见文档:SINAMICS S120控制单元手册。
在带编码器运行中,即采集转速实际值,会省略搜索过程。
使用异步电动机时,确定转速后首先会进行励磁(p0346)。接着会将斜坡功能发生器中的当前转速设定值设为当前的转速实际值。驱动从该值起向最终的转速设定值运行。
示例:在电源断电后,风扇驱动会通过“捕捉再起动”功能尽快再次切换到正在旋转的风扇电动机上,如图8-42,图8-43所示。
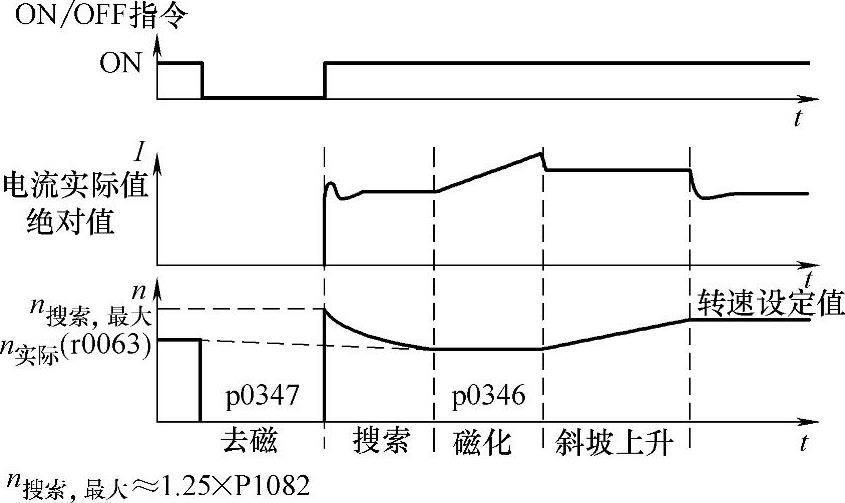
图8-42 示例:捕捉再起动,用于无编码器控制异步电动机
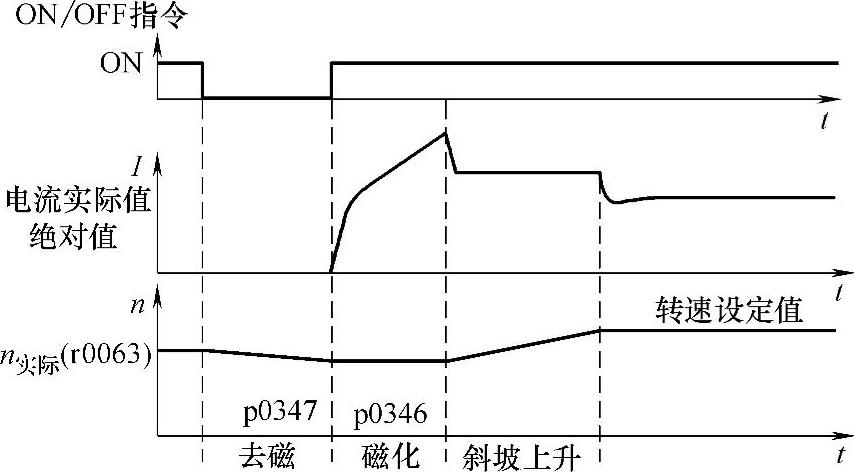
图8-43 示例:捕捉再起动,用于带编码器控制异步电动机
 警告
警告
在捕捉再起动功能(p1200)激活时,尽管驱动处于静止状态,而且设定值为0,但驱动仍可能会由于搜索电流而加速。
如果电动机处于该状态,若进入它的工作范围,可能会造成人员伤亡或财产损失。
说明(https://www.xing528.com)
使用异步电动机时,执行捕捉再起动前会首先等待去磁时间结束,在这段时间内电动机端子电压会逐渐降低。否则可能会在脉冲使能时,由于相位短路而出现过高的电流。
2.电缆较长时无编码器运行中的捕捉再起动功能
总体而言,电缆电阻是需要加以考虑的重要因素。在热电动机模型计算中就需要此数值。
执行电动机识别前,在参数p0352中输入电缆电阻。将参数p1203[0...n]设为至少300%。这样一来过程会比出厂设置(100%)持续得更长一些。通过修改捕捉再起动算法,可在电缆较长时对该功能进行优化。
说明
电缆较长时的捕捉再起动
为了对捕捉再起动功能进行优化,请通过跟踪(Trace)记录检查该功能。必要时对参数p1202和p1203的设置进行优化。
3.重要参数一览(参见SINAMICS S120/S150参数手册)
1)p0352[0...n]:电缆电阻。
2)p1082[0...n]:最大转速。
3)p1200[0...n]:捕捉再起动运行方式。
4)p1202[0...n]:捕捉再起动搜索电流。
5)p1203[0...n]:捕捉再起动搜索速度系数。
6)r1204.0...13 CO/BO:捕捉再起动V/f控制状态。
7)r1205.0...15 CO/BO:捕捉再起动矢量控制状态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。