



在日本安川点焊机器人系列中,应用于点焊用途的机器人主要有ES165D/ES165RD和ES200D/ES200RD,它们专门应用于点焊的主要特点为焊钳连接的气管、水管、I/O电缆及动力电缆都已经被内置安装于机器人本体的手柄内。因此,机器人在进行点焊生产时,焊钳移动自由,可以灵活地变动姿态,同时可以避免电缆与周边设备的干涉。
1.机器人基座部分
机器人基座部分(电缆、气管、水管的接入)如图4-21所示。
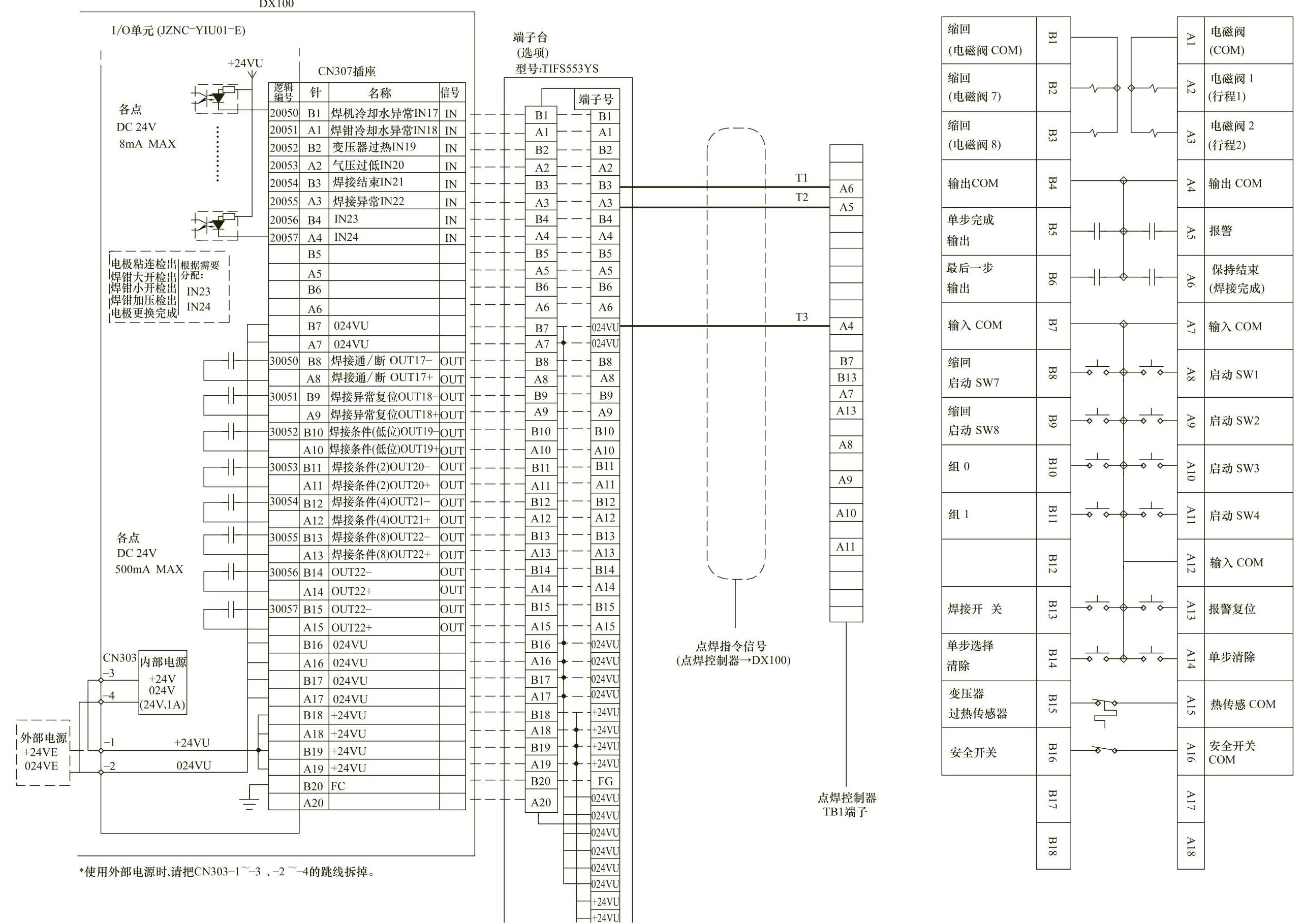
图4-19 机器人输入接线图
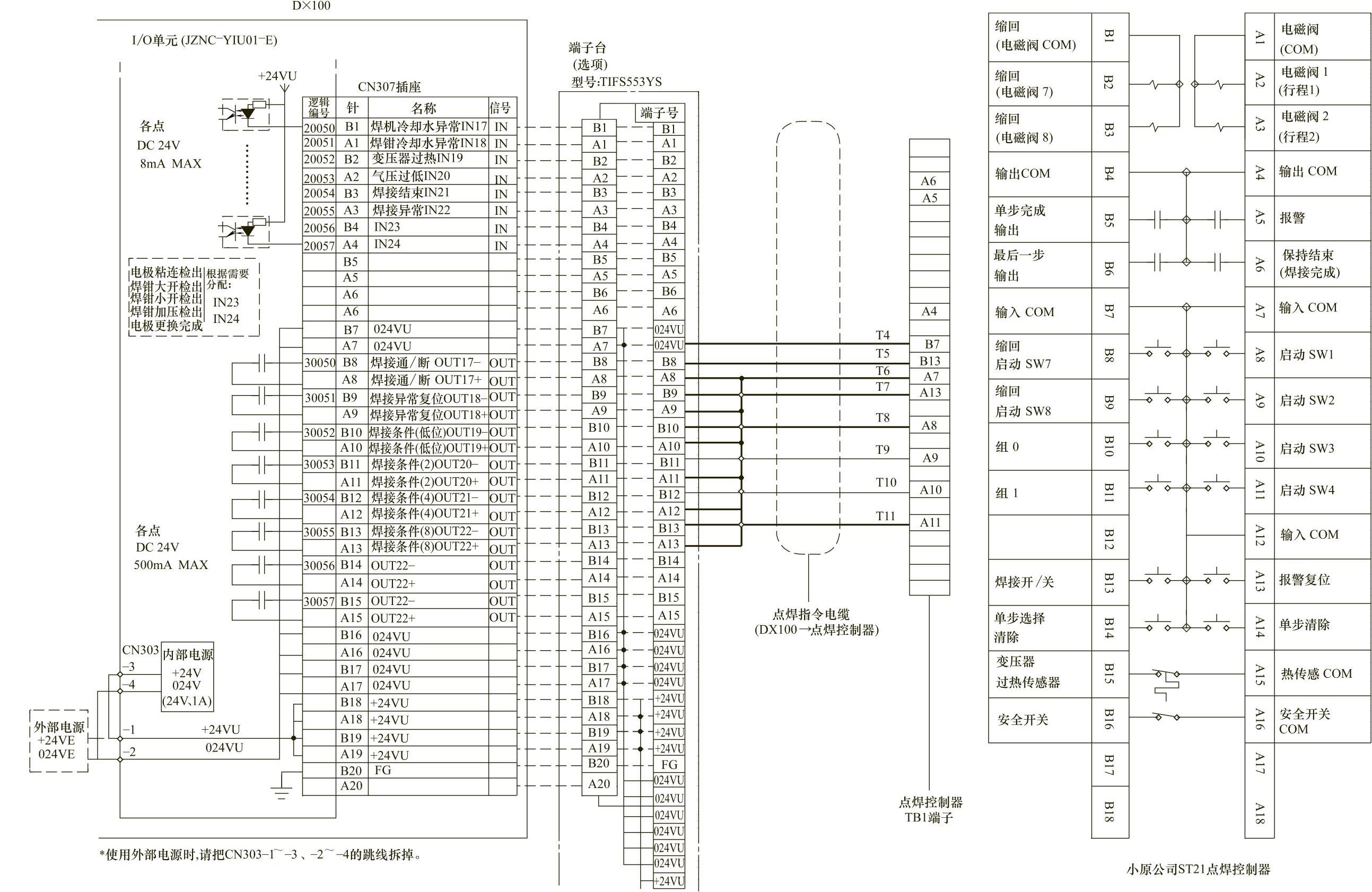
图4-20 点焊机器人输出接线图
2.机器人U臂连接部分
机器人U臂连接部分如图4-22所示。
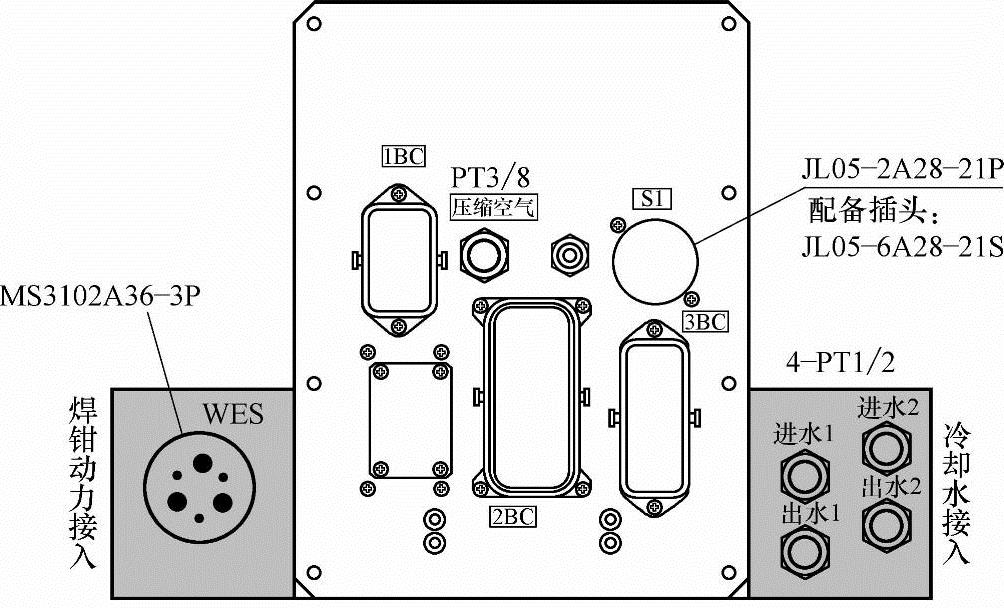
图4-21 机器人基座部分接口
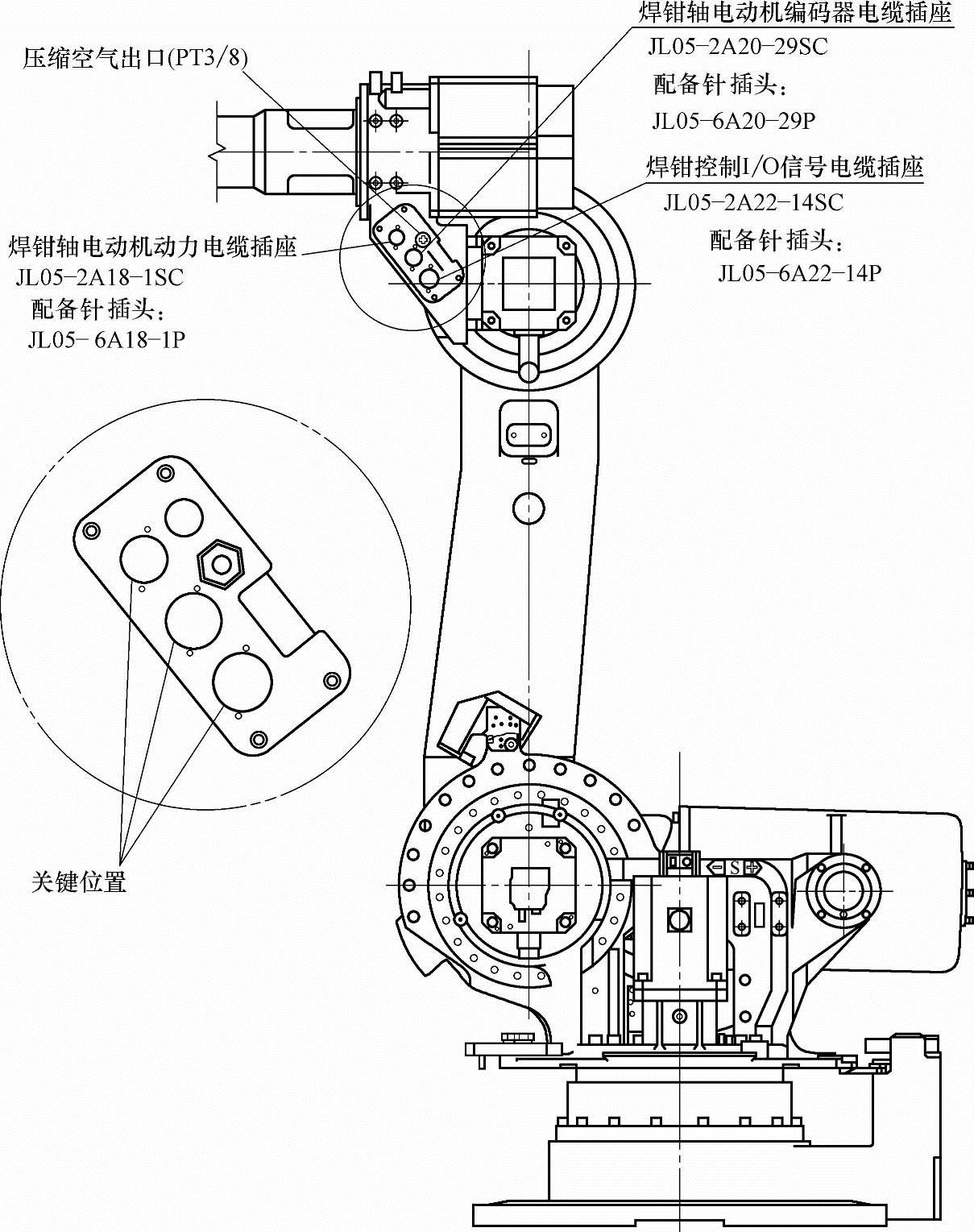
图4-22 机器人U臂连接部分
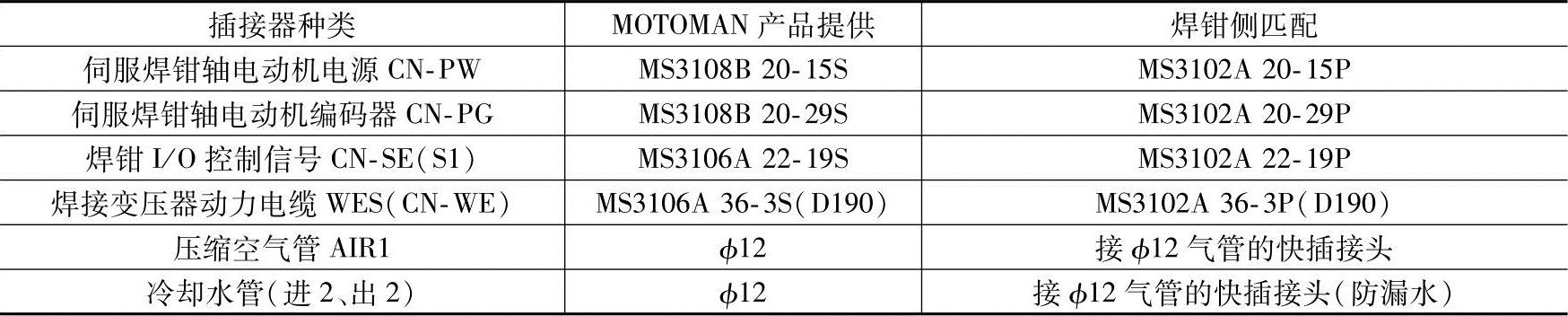
3.气动焊钳的连接
机器人与气动焊钳的连接如图4-23所示。
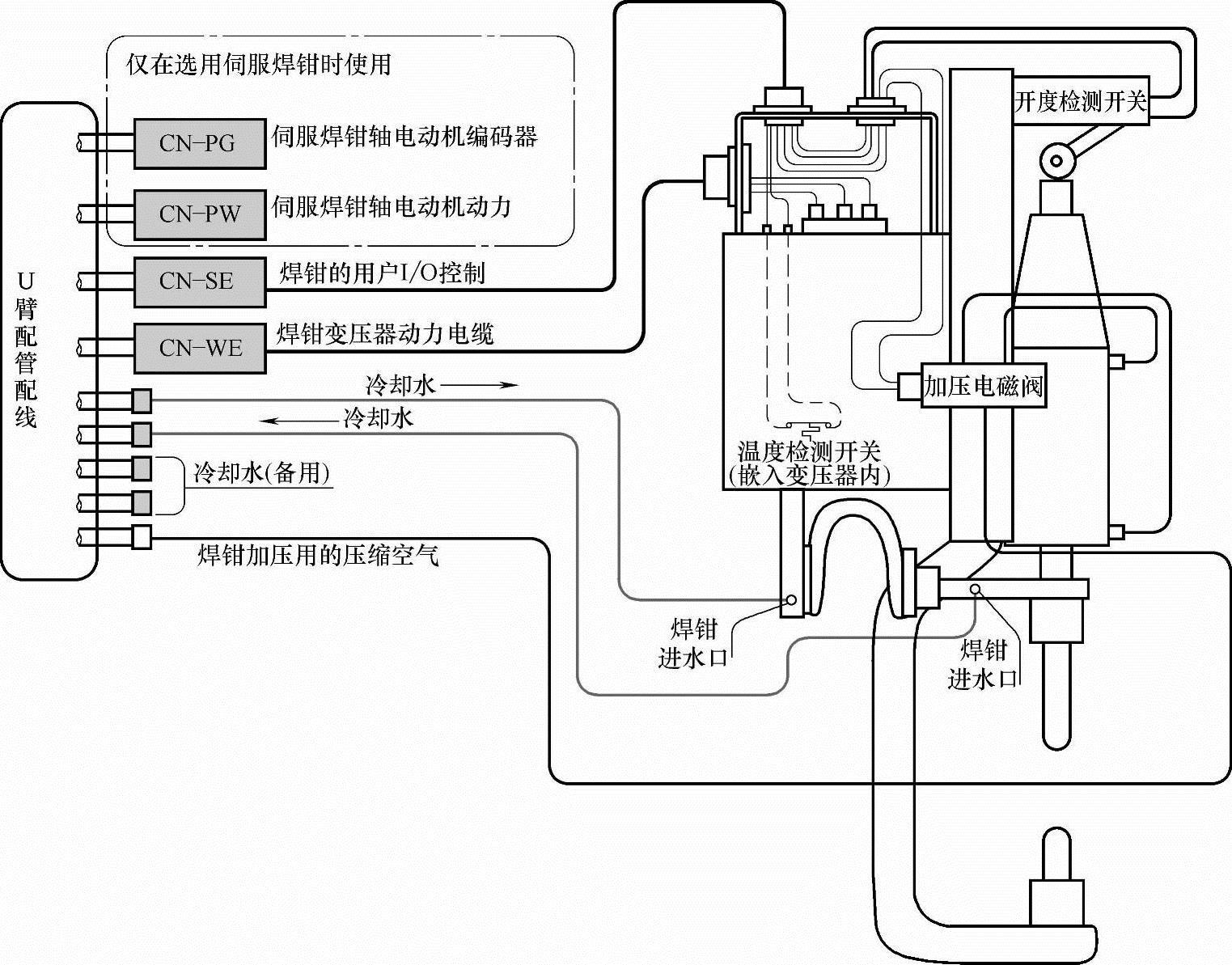
图4-23 机器人与气动焊钳的连接
机器人手腕末端配备的插接器(气动焊钳)规格见表4-5。
表4-5 机器人手腕末端配备的插接器(气动焊钳)规格

4.电动焊钳的连接
机器人与电动焊钳的连接如图4-24所示。
机器人手腕末端配备的插接器(电动焊钳)规格见表4-6。(https://www.xing528.com)
表4-6 机器人手腕末端配备的插接器(电动焊钳)规格
5.焊钳配线图
(1)用户I/O配线 用户I/O(输入/输出)配线如图4-25所示。
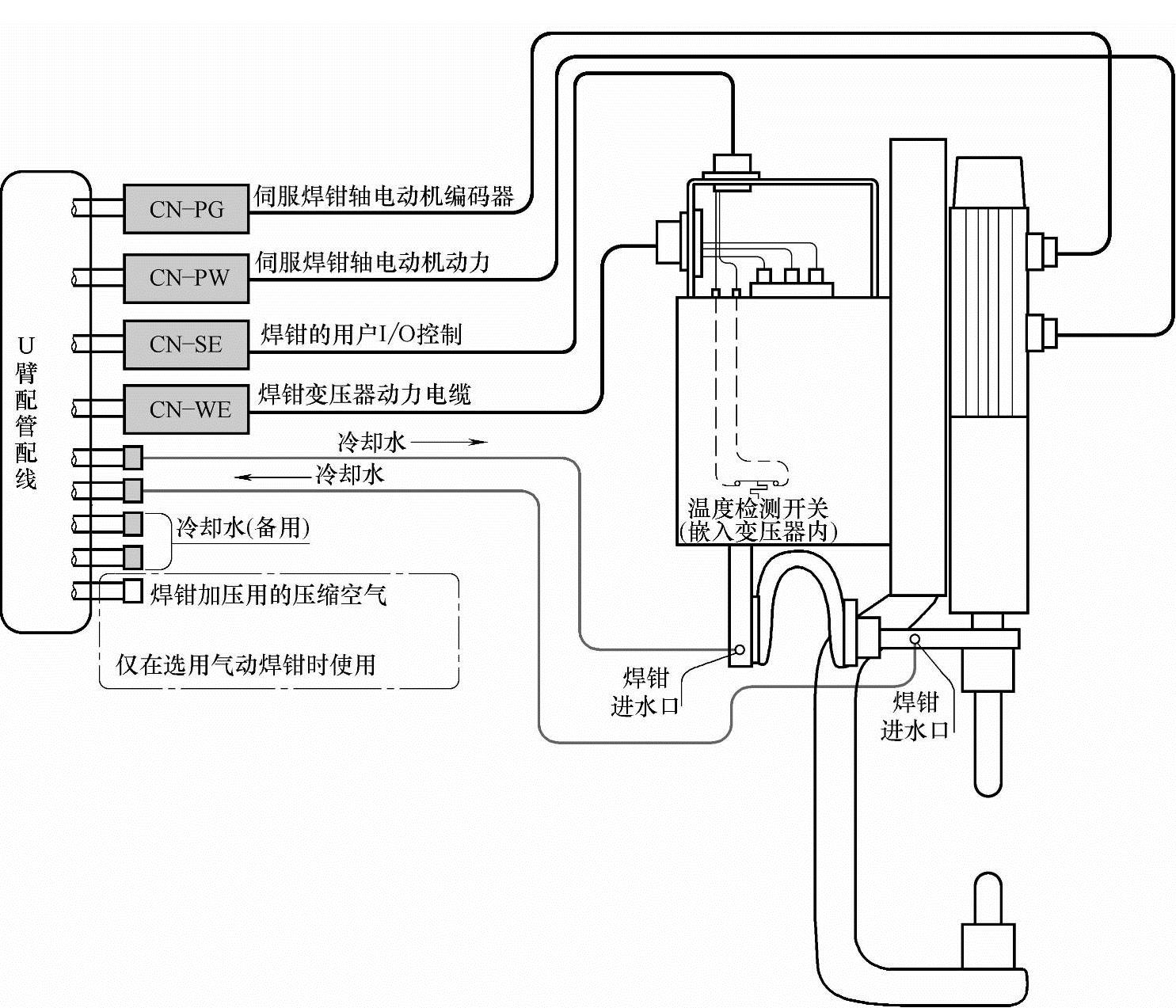
图4-24 机器人与电动焊钳的连接
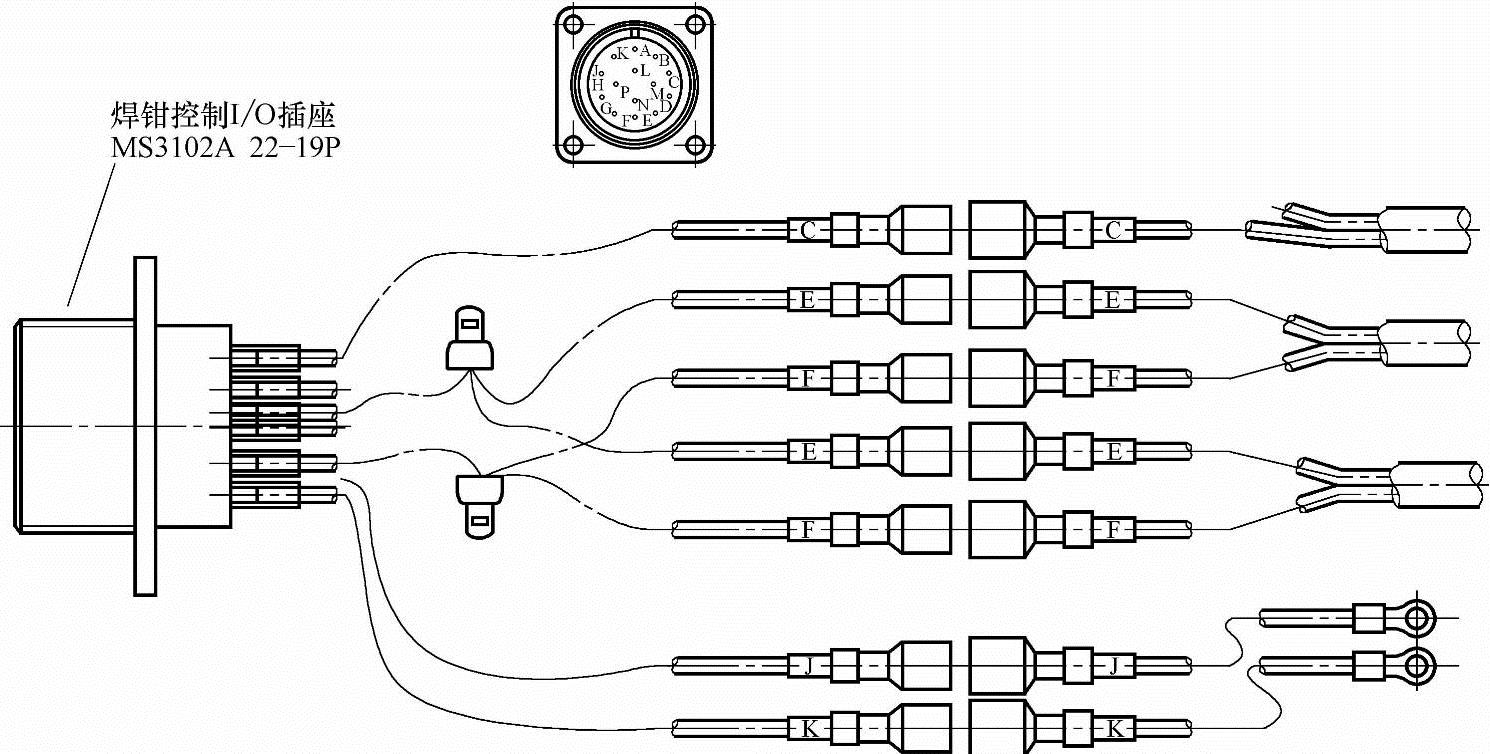
图4-25 焊钳控制插座用户I/O(输入/输出)配线
焊钳控制插座I/O(输入/输出)电缆编号与规格如图4-26所示。
图4-26反映了机器人对气动焊钳动作的控制信号(I/O)的标准分配,在使用电动焊钳时仅需要接入“J/K”(变压器温度检测)即可。
(2)焊接动力 焊接动力插座线号及标识如图4-27所示。
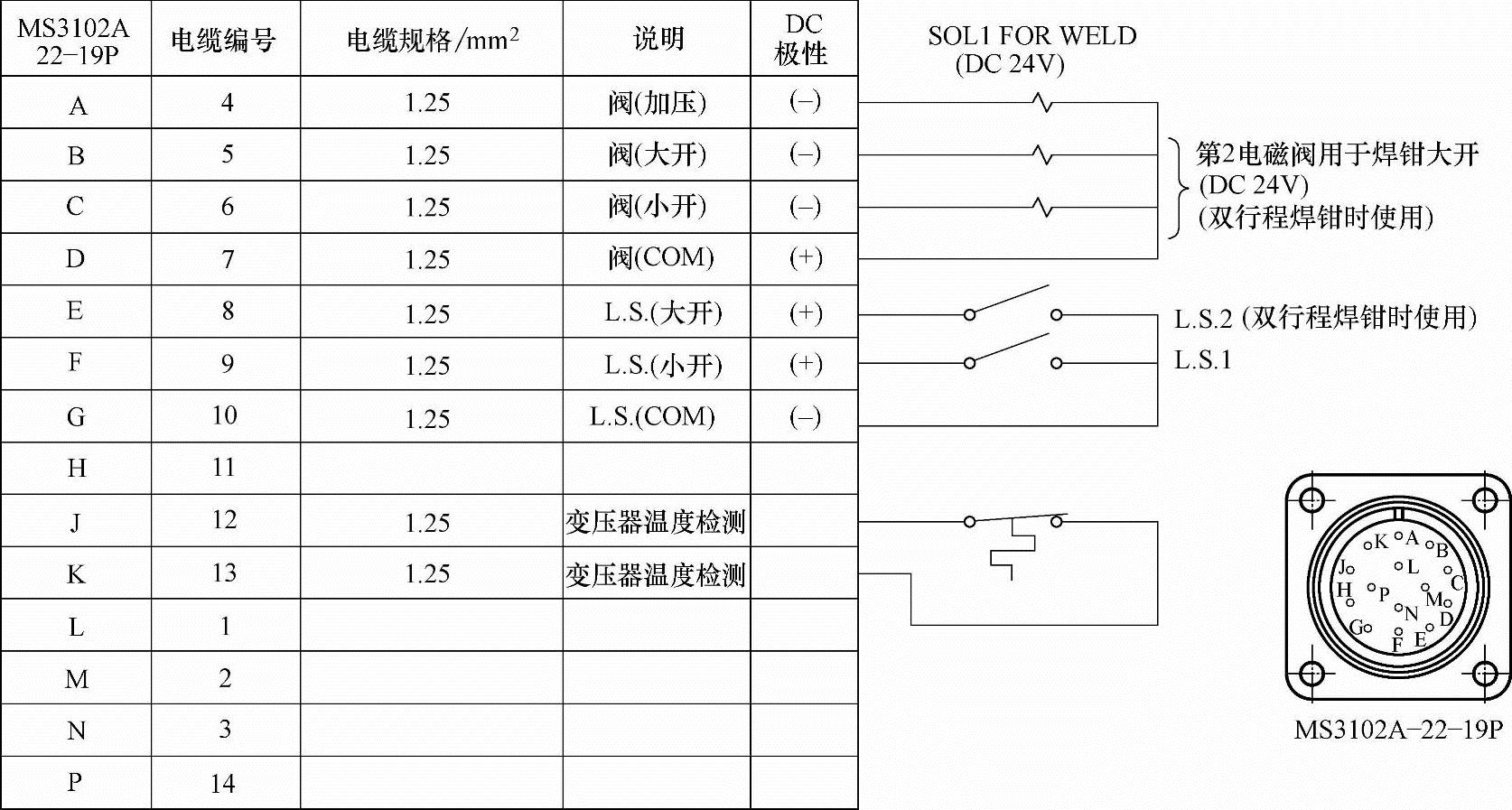
图4-26 焊钳控制插座I/O(输入/输出)电缆编号与规格
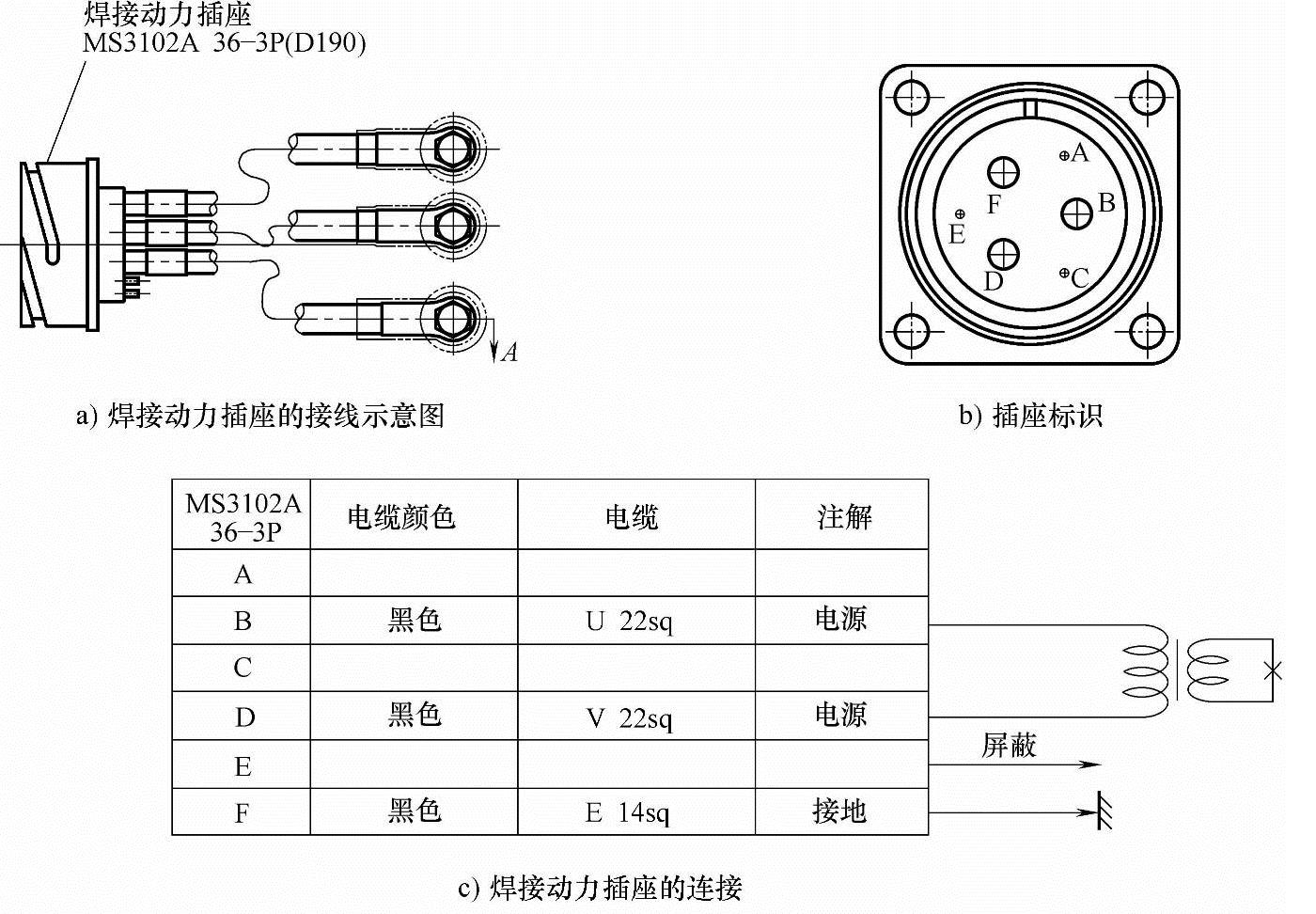
图4-27 焊接动力插座线号及标识
(3)电动焊钳的电动机 电动焊钳的电动机插座连接如图4-28所示。
(4)焊钳上的冷却水回路(见图4-29)
图4-29所示是焊钳常规冷却水路配置,为2-4-2配置,一般用于大型焊钳,还有1-4-1配置方式,可以用于小型焊钳的冷却。一般在焊钳设计图上有冷却水回路图指示,要注意核对。焊钳上配备的截止阀用于电极自动更换时对焊钳钳臂中水路的截止。
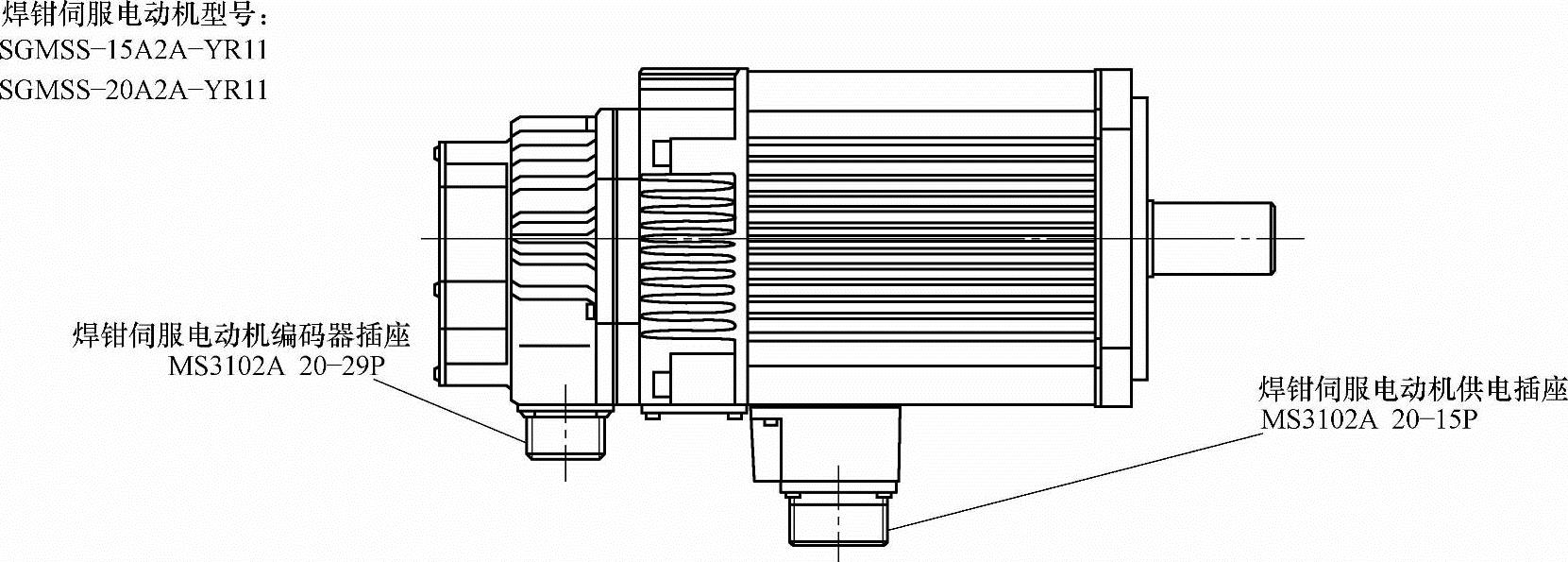
图4-28 电动焊钳的电动机插座连接
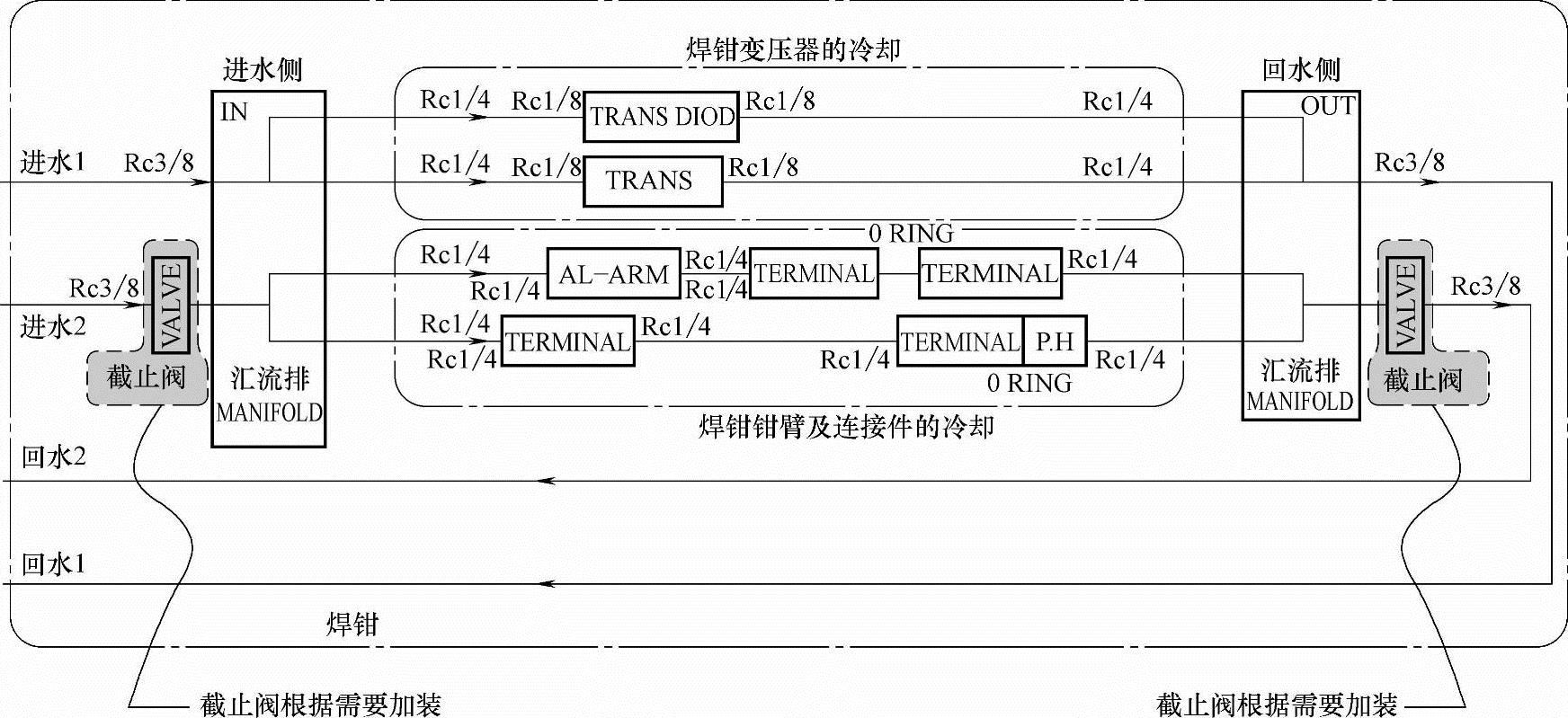
图4-29 焊钳上的冷却水回路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。