



1.外置式点焊电缆套件(型号IRB6640)
Spot Pack基本点焊包主要配置如下:点焊缆线套件;集成水、气模块;数字调节比例阀;底座信号、介质接入模块;底座点焊电源接入模块,如图5-58所示。
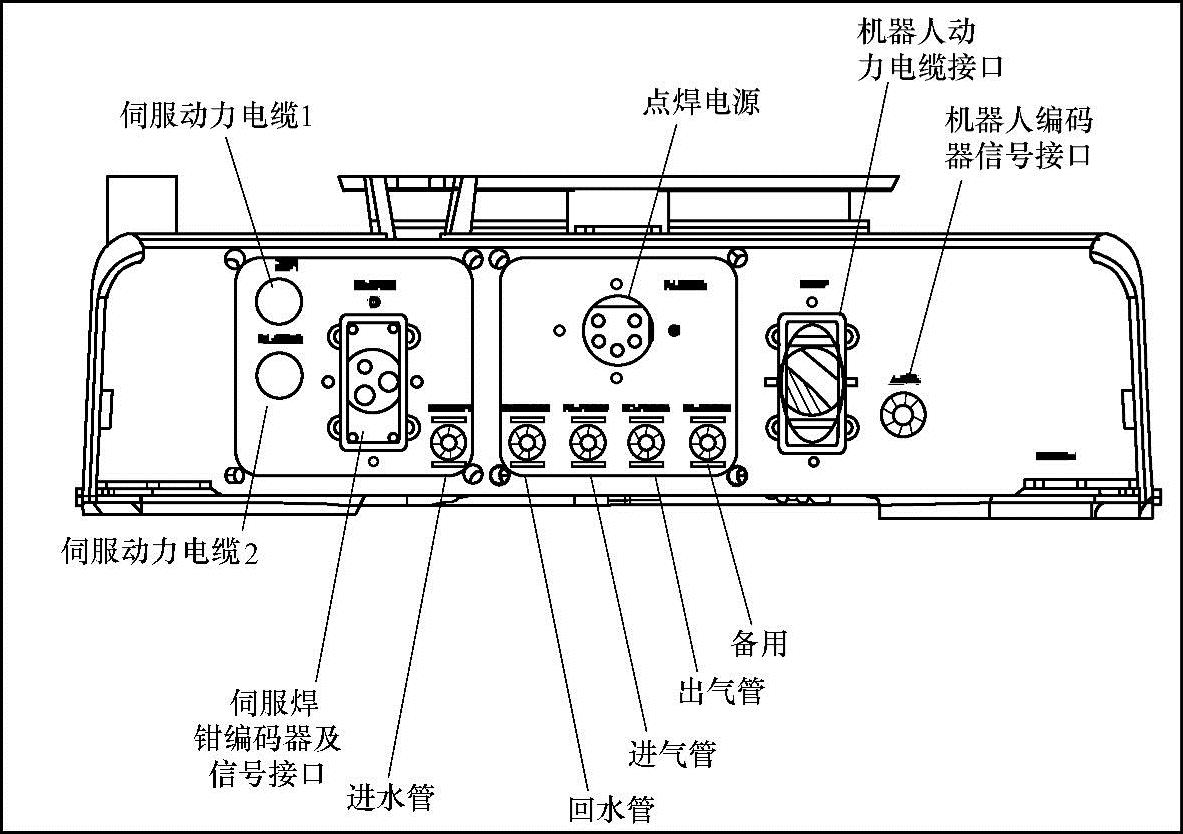
图5-58 外置式点焊电缆套件
点焊电缆套件是功能完善、经过严格测试和使用基础的标准化产品,设计合理、规范,外观整齐美观。
2.内置式点焊电缆套件
1)工具电缆外层由PUR保护。
2)第1轴可自由运动。
3)轴2前方有全部工作空间。
4)极大改善了4、5、6轴的工作空间。
5)电缆可随第6轴旋转。(https://www.xing528.com)
6)结构紧凑,更换快速,减少了前臂安装的部件,更加轻巧、方便的外部接口,超过6000h的MTBF(即平均故障间隔时间,是衡量一个产品(尤其是电器产品)的可靠性指标)。
3.系统水、电、气输入模块
机器人点焊系统的水、电、气、开关、阀组等各种接口均是集成整合后简单而规则的标准化产品,使用寿命长,而且维修快速简单。
1)配备控制焊枪压力的数字调节比例阀。
2)配备水温、流速、压力的监测和控制。要求入水口压力不低于0.2MPa,水温不大于30℃,水质洁净,水的电阻率在5kΩ·cm以上。对重要设备或部件应采用蒸馏水闭路循环并配以制冷系统,北方地区冬季下班后应将管道内的水排放干净,防止冻裂。进水管道与选用内径10~12mm的管子,排水宜选用内径为25mm的管子。
3)配备气压的监测和控制。工作时的最高压力为0.5MPa,故应选用气源的压力0.6MPa,耗气量以焊接的频率进行计算。为稳定气源压力,必要时应增设气罐,当要求压力波动小于5%时,气罐的容量应为一个使用循环耗气量的20倍。在气路管道中还可接入气水分离装置,以便去除压缩空气中的水分等。
4)配备气体处理。
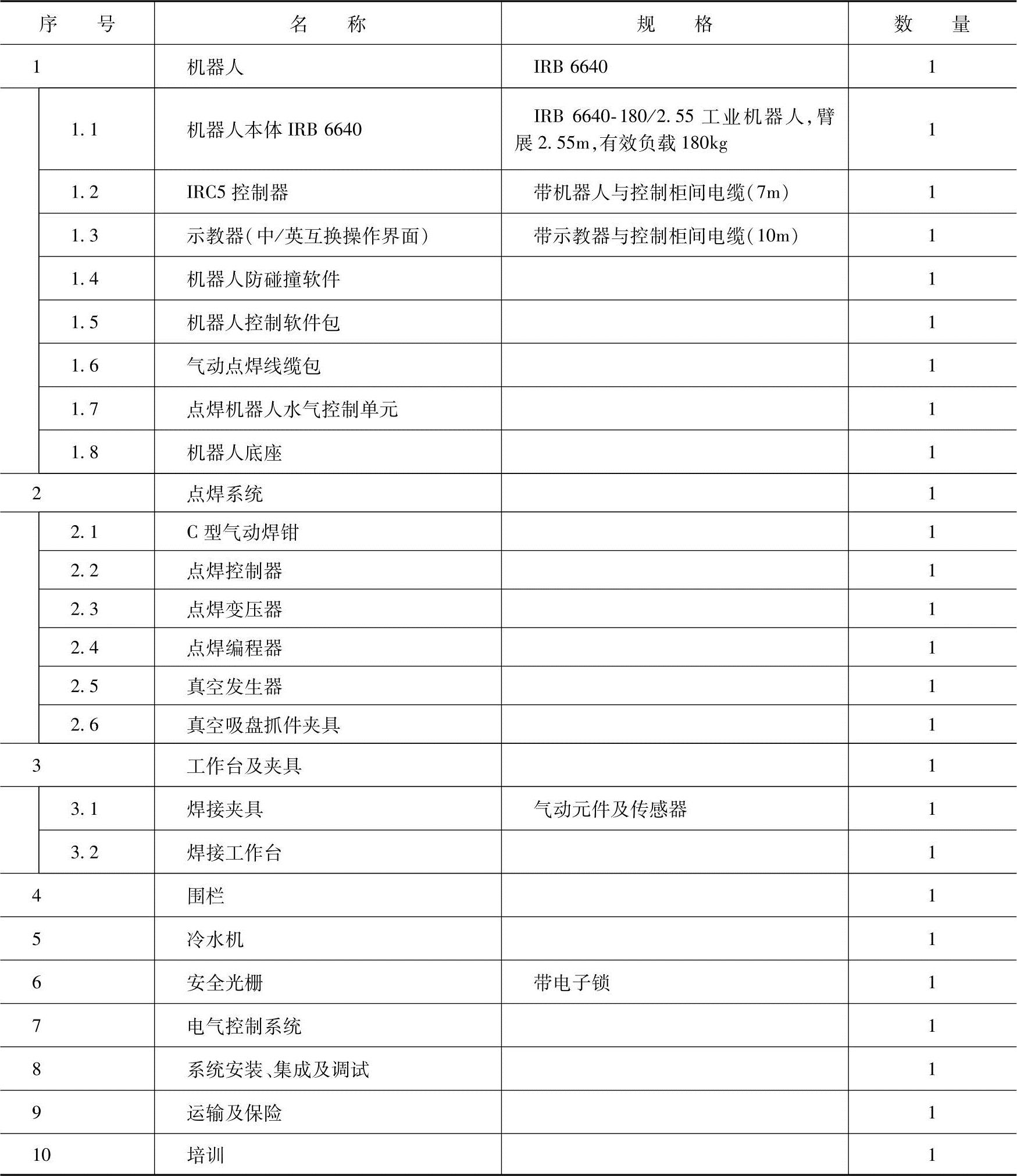
4.点焊机器人系统配置明细(见表5-15)
表5-15 点焊机器人系统配置明细
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。