



量化因子αE、αEC和输出比例因子αU对SR电动机模糊控制系统的动、静态性能有较大的影响,应当通过系统实际运行,权衡稳、快、准三方面的要求整定。
5.4.2.1 偏差e量化因子αE的选取
偏差e量化因子αE的大小本质上反映了控制系统对速度偏差的分辨率,影响系统的静态误差的动态调整时间。αE大,系统上升速率大;但αE过大,将使系统产生较大的超调,从而延长过渡过程。若αE很小,则系统上升慢,快速性差,稳态准确度低。
若设与第k次执行速度环对应的速度偏差量化值为E(kT),其准确量为e(kT),则有
E(kT)=INT(αEe(kT)+0.5) (5-78)
模糊控制系统的稳态过程可用下述模糊规则描述:若偏差为“零”,偏差变化为“零”,则控制增量为“零”。语言值“零”对应于一定的范围,当误差和误差变化都进入语言值“零”所对应的范围时,系统即进入稳态。由式(5-8)可导出误差的稳态取值范围为

则有

式(5-80)表明,稳态误差与αE成反比。
5.4.2.2 偏差变化量化因子αEC的选取(https://www.xing528.com)
αEC反映误差变化率,其合理选择对抑制超调有显著作用。αEC越大,系统上升速率越小,系统响应越慢,过渡过程时间长;若αEC越小,则系统响应越快;但αEC取值过小易导致很大的超调和振荡,这同样使系统调节时间变长。
5.4.2.3 控制输出比例因子αU的选取
αU在系统响应的上升和稳定阶段有不同的影响。在上升阶段,αU取得越大,上升越快,但易导致超调;αU小,则系统的响应缓慢。在稳定阶段,αU过大会引起振荡,从而导致调节时间增大。
5.4.2.4 比例因子自调整模糊控制器设计
上述分析表明,模糊控制同常规控制一样,其动、静态特性之间存在一定矛盾。对于具有非线性、变结构特征的SRD,正如采用固定参数的PID控制难以获得满意的动、静态性能,采用固定参数模糊控制器也不能保证系统的动、静态性能在大范围内始终优良。因此,为改善模糊控制器的性能,需根据系统的误差和误差变化等信息对控制器的参数进行在线修正。若同时调整αE、αEC和αU这三个参数会使控制算法过于复杂,大大减弱控制系统的实时性。从控制器的结构可见,比例因子αU的大小直接影响输出量,而且最终也能起到调整αE、αEC的作用。因此,可选择离线整定αE、αEC,在线调整αU的方法来改善系统的动、静态性能。
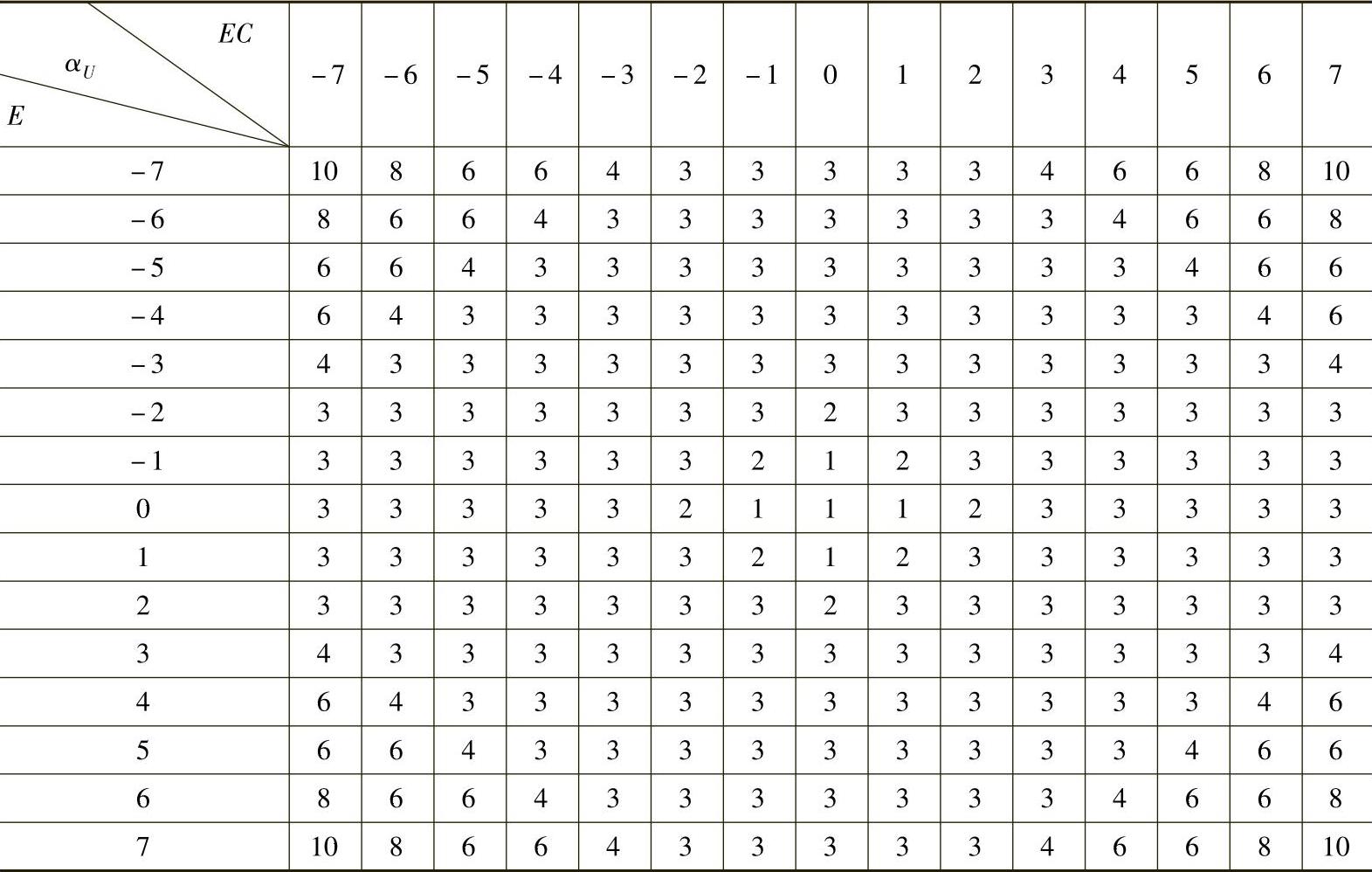
调整规则是:当E和EC较大时,控制系统主要是减小误差,加快动态过程,应取较大控制量,即应增大αU;当E和EC较小时,系统将接近稳定值,这时应减小αU,使控制量的阶跃变化小,最终达到稳态误差小的要求。由此经离线模糊推理运算,结合系统实际运行调整,得到比例因子αU取值在线查询表,见表5-4。
表5-4 比例因子αU取值在线查询表
对实验样机,偏差及偏差变化量化因子离线整定为αE=0.0175,e的约束区间为[-400,+400];αEC=0.035, 的约束区间为[-200,+200]。
的约束区间为[-200,+200]。
按照上述设计的SR电动机比例因子自调整模糊控制系统负载运行表明,系统有优良的动、静态特性和抗负载扰动性能[83]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。