



图3-13中,V1、V3、V4、V6均作为第一步换相开关器件,与两绕组相连的公共开关V2、V5则作为第二步换相开关。
换相的依据是位置检测信号,位置检测采用图4-1所示的光敏式转子位置传感器半数检测方案。设与导通角θc对应的时间为tc,两步换相的时间间隔为tm,若开通角θon=0°,则SR电机动逆时针、顺时针转动的换相规则分别见表8-1、表8-2。
表8-1 逆时针转动换相规则(APC方式)

表8-2 顺时针转动换相规则(APC方式)

与表8-1、表8-2开关规则对应的时序关系如图8-3所示。图中,V1~V6高电平表示其处于通态,低电平则表示其处于断态。
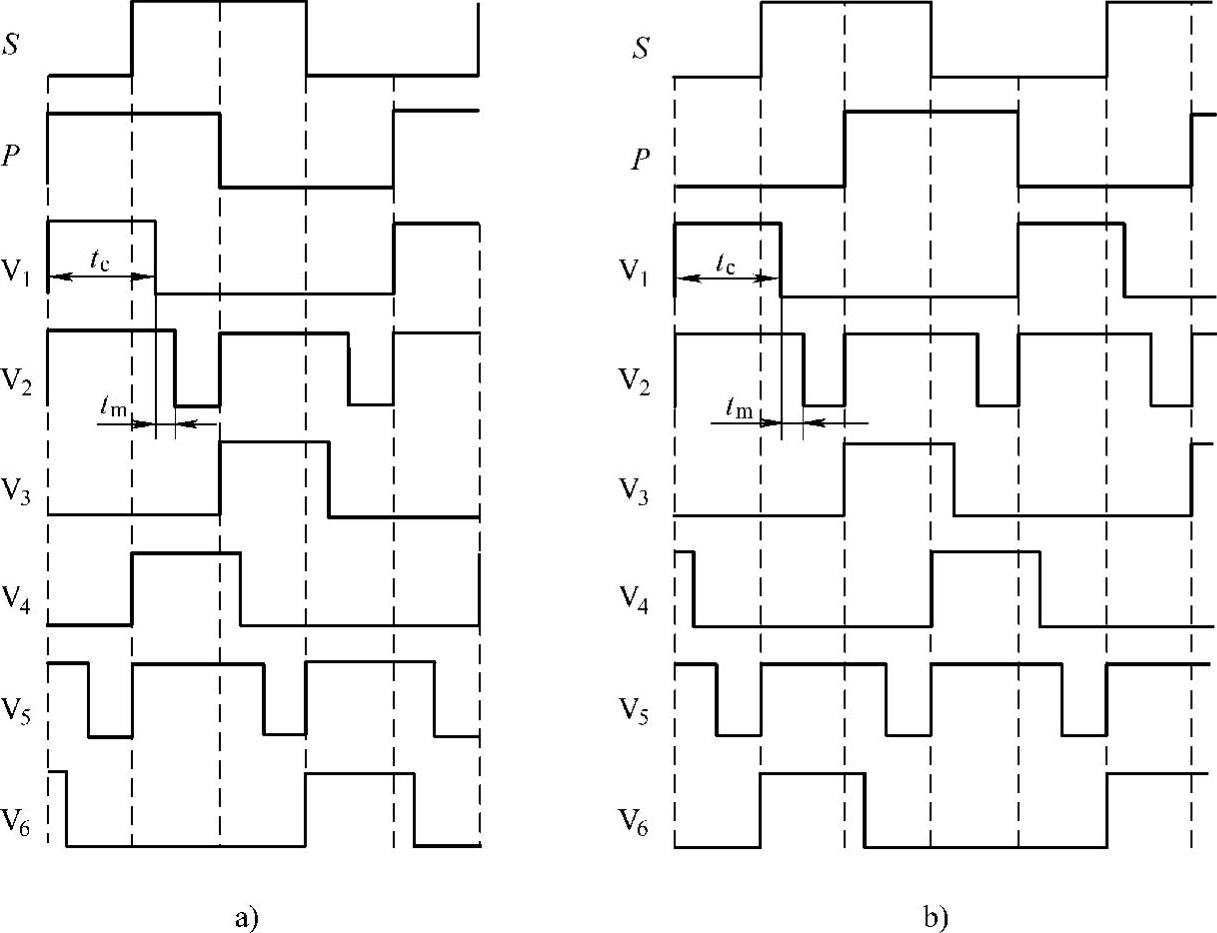
图8-3 开关状态时序(APC方式)
a)逆时针转动 b)顺时针转动
图8-4所示为实现上述换相控制的硬件电路。因为IV1~IV6分别接至对应M5715L.BL-GTR驱动模块的输入脚②端,其为低电平时,给GTR提供正向驱动电流,所以IVk(k=1,…,6)为低电平,则对应的主开关器件导通。
图中,IC1(六反相器)和IC2(74LS157,四2选1数据选择器)构成30°导通制的硬件换相逻辑控制。由图8-4可见,当S接+5V时,有如下逻辑表达式:
 (https://www.xing528.com)
(https://www.xing528.com)
式(8-1)为SR电动机顺时针转动30°导通制的换相逻辑;而若S接0V时,则有

式(8-2)为SR电动机逆时针转动30°导通制的换相逻辑。
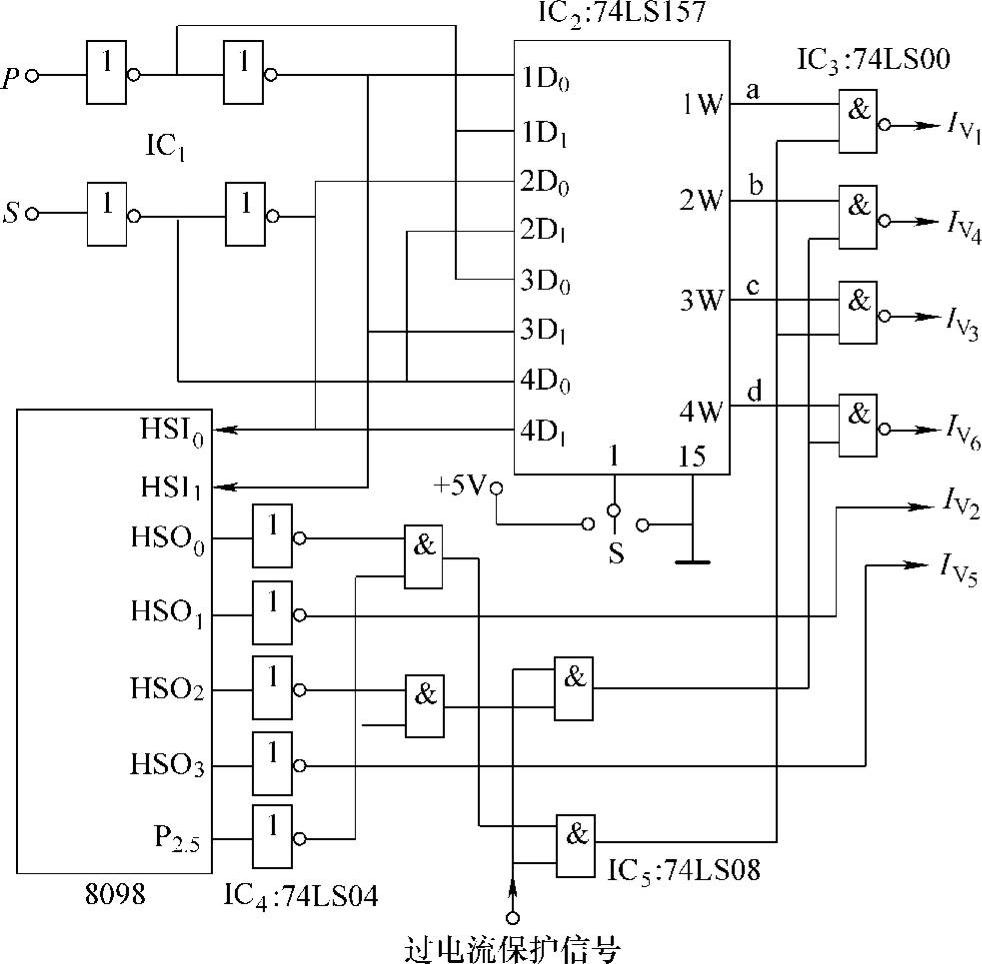
图8-4 主开关换相控制电路
8098的HSO.1、HSO.3分别产生V2、V5的换相控制信号。
8098片内的脉冲宽度调制器提供的PWM信号频率固定为15.625kHz,这一斩波频率对普通GTR而言偏高,故不采用片内的PWM方式,将P2.5作为普通输出口,由软件定时器T1、T2中断形成定频调宽的PWM脉冲,和HSO.2、HSO.0、IC1、IC2、IC3、IC4一起为工作在PWM方式下V1、V3、V4、V6提供换相控制信号;若为APC方式,则将P2.5置0。这里只用HSO.0、HSO.2即能完成V1、V3、V4、V6四个主开关器件的换相控制,关键在于IC1、IC2构成了30°导通制的换相逻辑控制,使得A、C相可共用HSO.0,B、D相可共用HSO.2,而不致产生换相混乱。注意到HSO.0、HSO.2分别为两相共用,根据图8-3所示,可得与图8-3对应的HSO.0~HSO.3时序,如图8-5所示。
在图8-4硬件电路支持下,软件设计的任务就简化成在S、P跳变引起的HSI中断服务程序中判别电动机是逆时针转动还是顺时针转动(74LS157的①脚与8098的P0.7脚是相连的,因此判别转向是通过测试P0.7脚的状态实现的),然后检测S、P状态,产生相应的HSO.0~HSO.3信号。
由于两步换相限制了导通角θc不得超过30°,这降低了起动性能,为此在起动阶段HSO.0、HSO.2皆置0,而HSO.1、HSO.3皆置1,即不采用两步换相法,而采用两相全开通起动方式,待起动过程结束后,再切换到两步换相法。另外,由于SR电动机是从静止状态开始起动的,此时HSI口测不到S、P的跳变信号,因此IC1、IC2同时还为起动时主开关器件正确控制提供了保证。
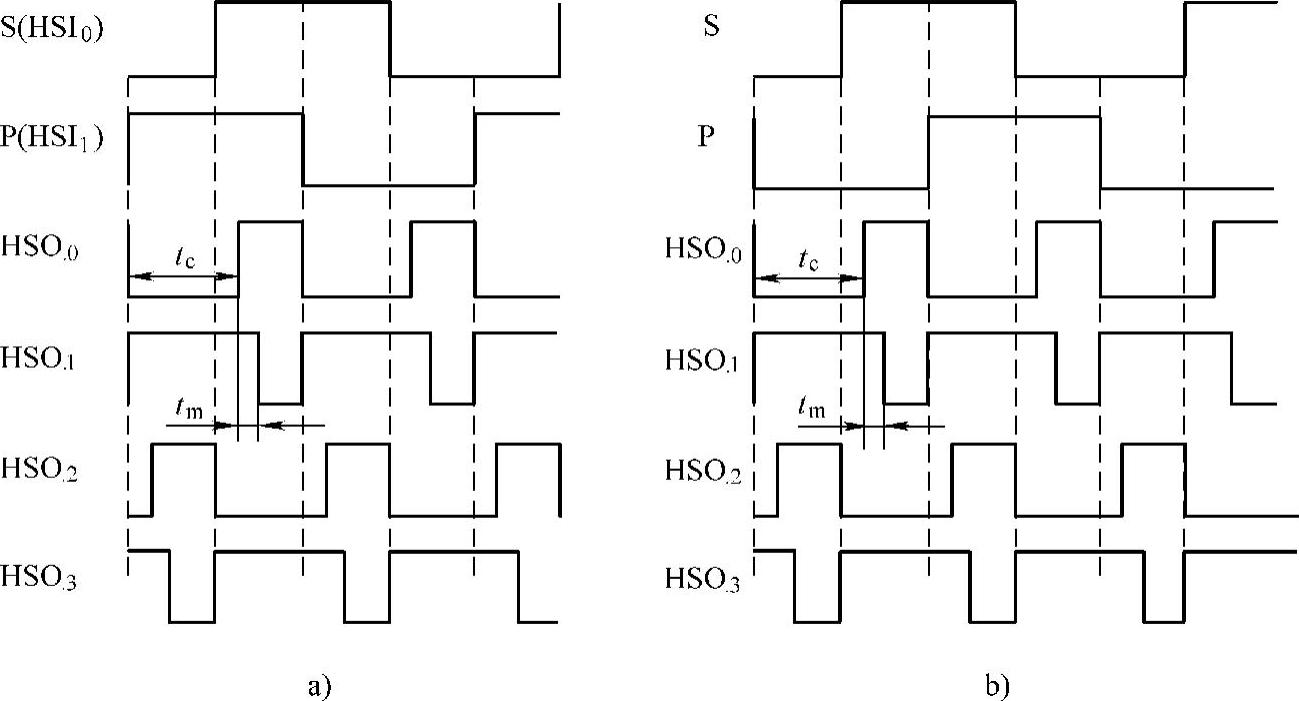
图8-5 HSO口线时序(APC方式)
a)逆时针转动 b)顺时针转动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。