



1.黏滑压电致动微机器人
瑞士苏黎世技术学院的研究小组于1994年实验的3自由度机器人是一种可以夹持微米尺寸的物体,并以纳米级的精度定位的纳米机器人。纳米机器人分为图像识别系统、计算机控制位移系统,以及为实现特定功能而设计的微工具(microtools)系统几个部分,如图4-78所示。
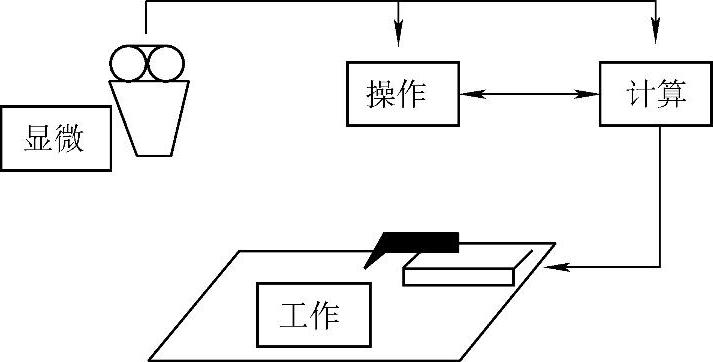
图4-78 纳米机器人
其中,图像识别系统的作用是将图像反馈给计算机控制位移系统,操纵3DOF工作台定位。工作台所用的高精度定位系统的核心部件是微压电致动器。
这种微压电致动器已成功地应用于扫描隧道显微镜(STM)和原子力显微镜(AFM)。纳米机器人的微工具,如微镊子是集传感器、致动器于一体的微机械,用于夹持微物体。
目前,纳米机器人的致动一般是通过蠕动机构、冲击驱动、惯性驱动、黏滑机构和基于杠杆的驱动等几种方式实现。黏滑压电致动微机器人采用的是惯性驱动。
黏滑压电致动微机器人由内外两个平台构成,平台之间用三个压电致动器和柔性铰链相连。黏滑压电致动微机器人在工作台上的移动精度可达10nm。需要快速移动时,压电致动器在150V电压下可一步移动2.5mm。黏滑压电致动微机器人定位的准确度依赖于图像识别系统的反馈控制环,该反馈控制环是基于对由扫描电子显微镜SEM摄取的静态图像的分析和处理。
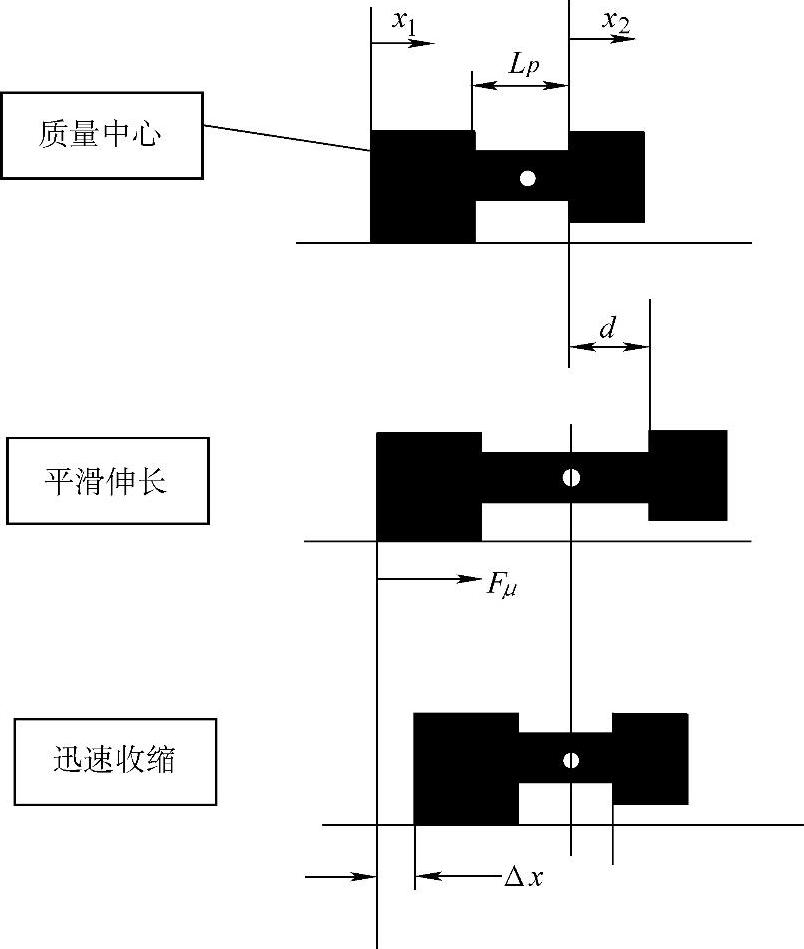
图4-79 惯性驱动原理
黏滑压电致动微机器人采用惯性驱动的原理如图4-79所示。通过压电材料的电致伸缩效应使质量中心前移,并在压电材料收缩时利用微致动器的惯性使微致动器向前运动。(https://www.xing528.com)
2.细线跟踪自行走微机器人
细线跟踪自行走微机器人是一种微型自主机器人,它由致动器、传感器和控制器构成,设计为可沿一条黑线运动(运动路线标识)。细线跟踪自行走微机器人的结构如图4-80a所示。细线跟踪自行走微机器人采用的是电磁铁致动器,共有左右两组。电磁铁致动器单元的结构如图4-80b所示。
线圈绕组在加载电流时可将悬置在绕组中的弹簧片向前移动,同时弹簧片又连接带倾斜纤毛的底板,这样通过线圈绕组就可移动带倾斜纤毛的底板。带倾斜纤毛的底板的作用在于用倾斜成一定角度的纤毛来保证单向移动。两个电磁铁致动器单元交替通电就可使微机器人运动。细线跟踪自行走微机器人通过悬伸在前端的光敏IC(红外线传感器)拾取地上黑线,红外线传感器可判别微机器人是否沿黑线移动,并将结果传输给控制器(置于微机器人顶端的可编程逻辑设备)处理。由控制器决定两个电磁铁致动器单元的运动与否,以保证微机器人始终沿黑线运动。
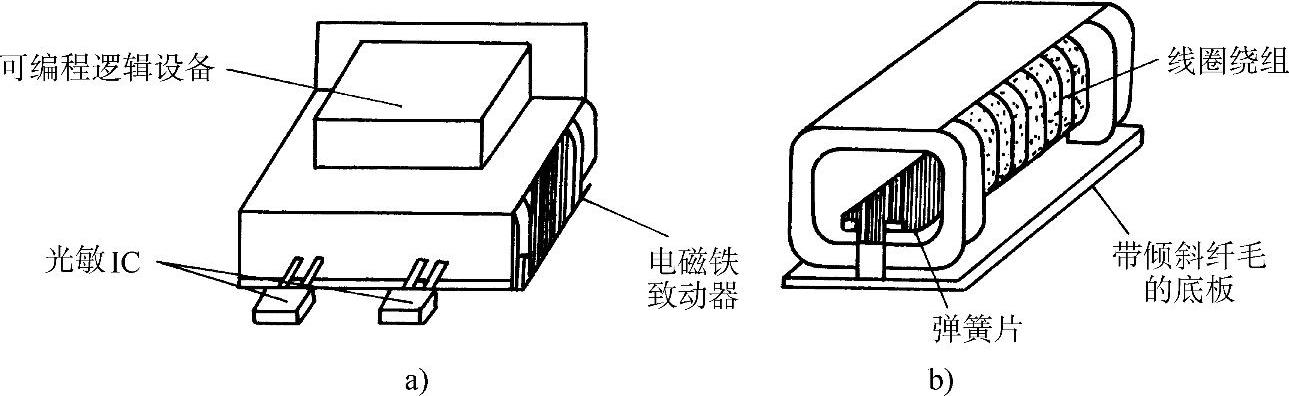
图4-80 细线跟踪自行走微机器人
3.核反应堆管道检查微机器人
核反应堆的冷却采用三层循环水方式以保证充分冷却和防止核污染的泄漏。三层循环水的流通管道是相互隔离的。为进行核反应堆的管道检查,要求微机器人应具有对环境的感知能力、自驱动能力、可遥控性及信号接收与传输等性能。核反应堆管道检查微机器人可以在检查热交换管时不停工或使停工时间尽量少。值得一提的是该系统的任何一部分的研制对于大规模生产适于工业应用的MEMS部件都大有指导意义。管道检查机器人由前端的超声波微声纳和微视觉传感器来识别前进方向,并由压电驱动器和蠕动驱动机构提供向前的蠕动力。由微光谱摄像仪连接器完成对管壁的检查。检查结果信号由光电转换器抬取。远程操纵协调控制器及微波发射器是远程控制信号的传入和输出设备。
4.微型飞行器
微型飞行器(MicroAirVehicle,MAV)也称为微型飞机,它与传统意义上的飞机有本质区别,当前其长、宽、高的目标尺寸极限不超过15cm,预计在不远的将来微型飞行器将被制作成昆虫一样大小。微型飞行器主要采用了微型电子机械制造技术,系统功能高度集成,其成本及价格大为降低。微型飞行器便于随身携带,可配备给单兵或单人使用,适应军事或民用的隐蔽性侦察、城市或室内等复杂环境作战、跟踪尾随、化学或辐射等有害环境探测、复杂环境的救生定位等特殊任务。微型飞行器属于一种可军民两用的新型装备。
微型飞行器的基本特征是尺寸小,目前最小尺寸的无人驾驶机的翼展为1.2m,质量仅为4.5kg。而MAV的尺寸约为它的1/10,重量约50g。15cm尺寸的限制,一方面是从它的特殊用途考虑的,即尺寸越小越容易满足便于携带、成本低廉、维护方便、隐蔽性高等特定要求。另一方面与一般的战斗机或小型无人飞机相比较,飞行器的尺寸小到15cm以下时,其飞行特性将界于最小的飞鸟与最大的昆虫之间;其物理特性会发生根本性改变:雷诺数极小,表面积与体积之比很大,总重量(包括负载)严格受限。从结构特点、飞行力学、负载特性、能量供给、敏捷性等方面来看,微型飞行器与蜜蜂、蜻蜒很相似,有时蜂鸟更相似,已经与任何传统的飞机有了本质区别。微型飞行器的研究涉及器件集成、通信、飞控、负载、能量与推进技术等课题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。