



传统上,对于三相笼型异步电动机,在与负载之间串接电磁转差离合器,通过调节电磁转差离合器的励磁,改变转差率进行调速的方法,称为电磁调速。对于绕线转子异步电动机,由于转子绕组能通过集电环与外部电气设备相连接,所以,除了可在其定子侧控制电压、频率等以实现对电动机的转速调节外,还可在其转子侧引入控制变量,如附加电动势进行调速。方法一是在转子外电路上串入附加可变电阻,通过对可变电阻的调节,使电动机的转差率加大,改变电动机的机械特性斜率,使电动机在较低的转速下运行,从而实现调速,称为转子串电阻调速。目前,这种方法极少采用。如果在绕线转子异步电动机转子回路中串入可调节的附加电动势来改变电动机的转差率,其中的大部分转差功率被串入的附加电动势所吸收,再利用附加装置,把吸收的转差功率回馈电网或转换能量加以利用,这种方法称为串级调速。根据转差功率吸收利用的方式不同,串级调速可分为机械串级调速、电气串级调速(晶闸管串级调速)两种形式。附加电动势原理如图4-34所示。
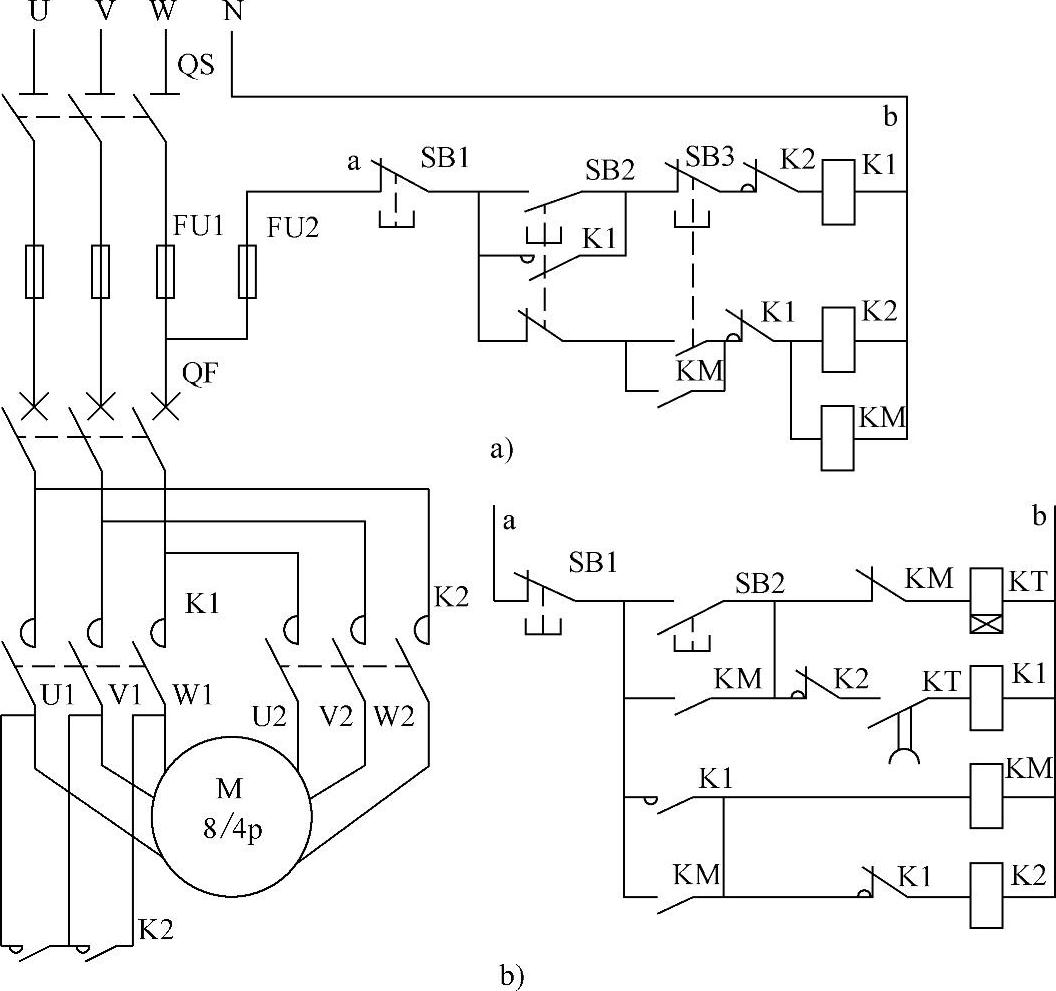
图4-33 双速电动机的控制线路
机械串级调速系统也称谢尔比斯系统或克莱玛系统,其基本原理是绕线转子异步电动机与一台直流电动机同轴,共同带动负载。转差功率经整流器变换后传输给直流电动机,直流电动机再将这部分电功率转变为机械功率传送给负载。这样就相当于在负载轴上增加了一个拖动转矩,从而很好地利用了转差功率。其中,直流电动机的电动势作为附加电动势,通过调节直流电动机的励磁电流就可以改变直流电动机的电动势,从而调节异步电动机的转速。增大直流电动机的励磁电流可以减速,反之则加速。
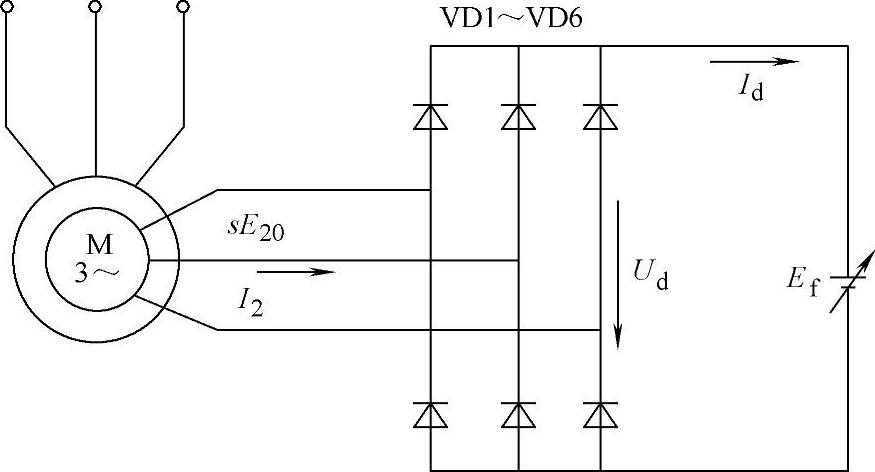
图4-34 附加电动势原理
晶闸管串级调速的基本原理是在绕线转子异步电动机转子侧通过晶闸管整流桥,将转差频率交流电变为直流电,再经可控逆变器获得可调的直流电压作为调速所需的附加直流电动势,将转差功率变换为机械能加以利用或使其反馈回电源而进行调速的一种方式,其电气原理见图4-35。
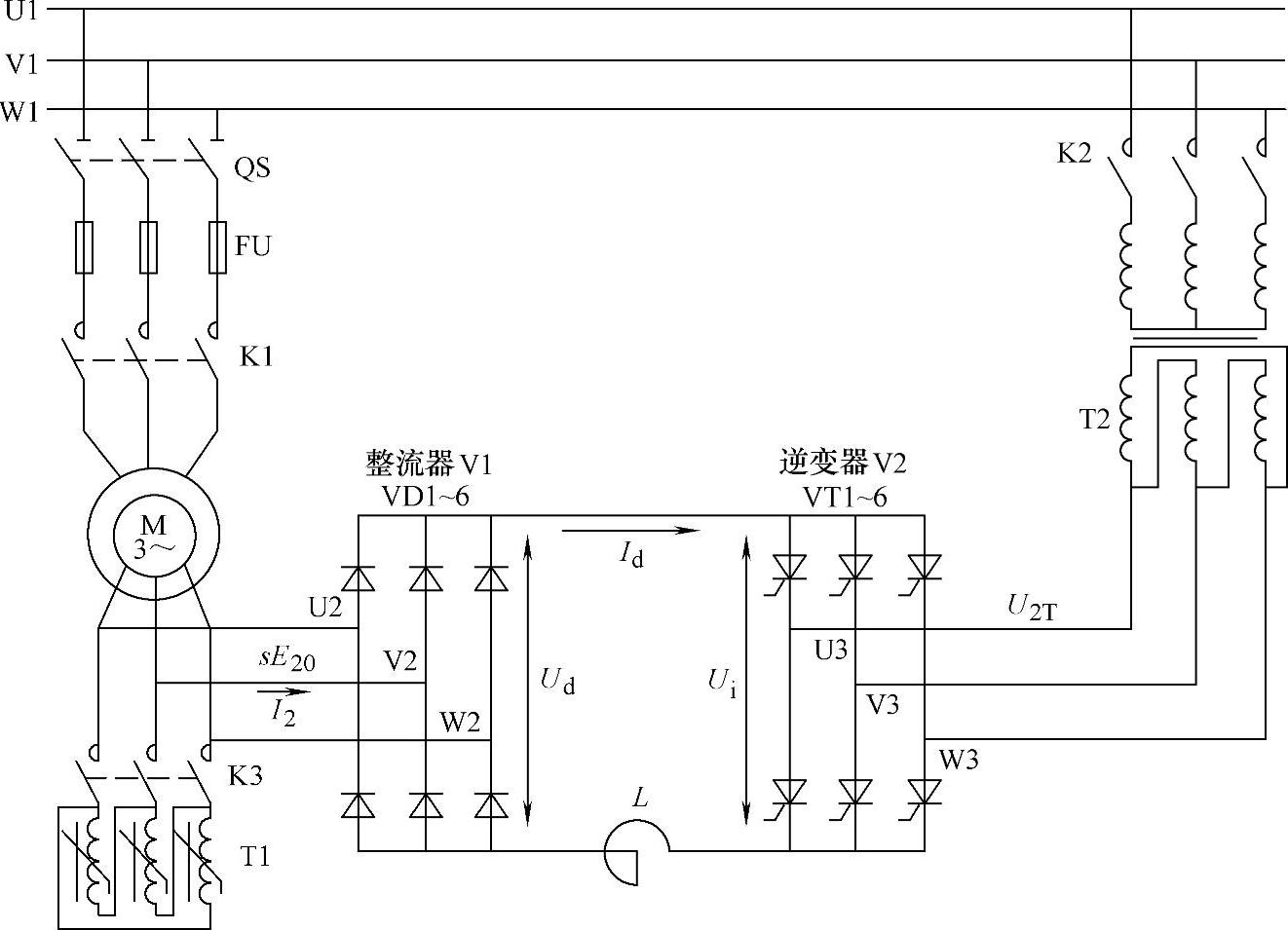
图4-35 晶闸管串级调速系统原理图
在绕线转子异步电动机转子回路中引入可控交流附加电动势,可以改变电动机的转速,但由于电动机转子电动势的频率是其转速的函数,所以附加电动势的频率必须能随电动机转速而变化,且在调速的动态过程中保持一致。这就需要在转子侧加入可变频率、可变电压幅值的量,这在工程上是不易做到的。所以人们想到将电动机转子电动势先整流成直流电压,然后引入一个直流附加电动势,并控制其幅值,就可以调节异步电动机的转速。这样,就把交流变压变频的问题,转化为与频率无关的直流变压问题。具体是采用工作在有源逆变状态的晶闸管可控整流器吸收从电动机转子侧传送过来的转差功率并产生附加直流电动势的电源。(https://www.xing528.com)
图4-35中,除电动机M外,其余装置均为静止型的元器件,所以也称为静止型电气串级调速系统。从这个装置的连接可以看出,它们构成了一个交-直-交变频器,由于逆变器V2通过变压器与交流电网相连,它输出的频率即电网频率,所以V2是个有源逆变器。从变频角度看,串级调速系统也可以看作是在定子恒压恒频供电下的转子变频调速系统。
图4-35中,三相绕线转子异步电动机M的转子相电动势sE20经三相不可控整流器V1整流,输出直流电压Ud。工作在逆变状态的三相可控整流装置V2,除提供可调的直流电压Ui作为调速所需的附加直流电动势外,还可将经V1整流后输出的异步电动机转差功率逆变成交流,并回馈到交流电网。T1为逆变变压器,L为平波电抗器。两个整流装置电压Ud与Ui的极性以及直流回路电流Id的方向如图3-45中所示。由此可以写出整流后的转子直流回路电压平衡方程式:
Ud=Ui+IdR
或
式中,K1、K2为电压整流系数,三相桥式电路,K1=K2=2.34;Ui为逆变器直流侧电压(即直流附加电动势);U2T为逆变变压器的二次相电压;β为工作在逆变状态的可控整流装置V2的逆变角;R为转子直流回路总电阻。
从式(4-3)可以看出,Ud中包含了电动机的转差功率,Id与电动机转子交流电流I2间有固定的比例关系,近似地反映了电动机电磁转矩的大小,而β角是控制变量。所以,式(4-3)可看作是在这种接线形式下电动机机械特性的间接表达式s=f(Id,β)。下面分析系统的工作过程。
设电动机带动恒转矩负载在某一转速下稳定运行,现在要改变其转速,可以控制逆变角β,当β角增大时,逆变电压Ui相应减小,但受机械惯性作用,电动机转速不会立即变化,所以Ud仍维持原值。这样,转子直流回路电流Id就要增大,转子电流和电磁转矩都会相应增大,而负载转矩未变,电动机就加速。在加速过程中,转子整流电压Ud随之减小,又使电流Id减小,直到Ud、Ui与Id间取得新的平衡为止。最后,电动机进入新的稳定运行状态,并以比原转速更高的转速运行。同理,减小β角时,电动机将降低转速运行。这就是以电力电子器件组成的绕线转子异步电动机电气串级调速系统的工作原理。
另外,通过调节β值改变电动机转速时,由于逆变角β可平滑连续调节,异步电动机的转速也能被平滑连续地调节。此外,由于电动机的转差功率能通过转子整流器变换为直流功率,再通过逆变器变换为交流功率而回馈到交流电网或生产机械上,这样转差功率被利用,效率较高,是一种节能型调速方式,在大功率风机、泵类及轧钢机、矿井提升机、挤压机等传动电动机上广泛应用。晶闸管串级调速的主要缺点是功率因数偏低、谐波影响较大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。