



进给伺服系统常见的故障如下:
1.超程
当进给运动超过由软件设定的软限位或由限位开关决定的硬限位时,就会发生超程报警,一般会在CRT上显示报警内容,根据数控系统说明书,即可排除故障,解除报警。具体情况见表7-1。
表7-1 超程故障的原因及排除

2.过载
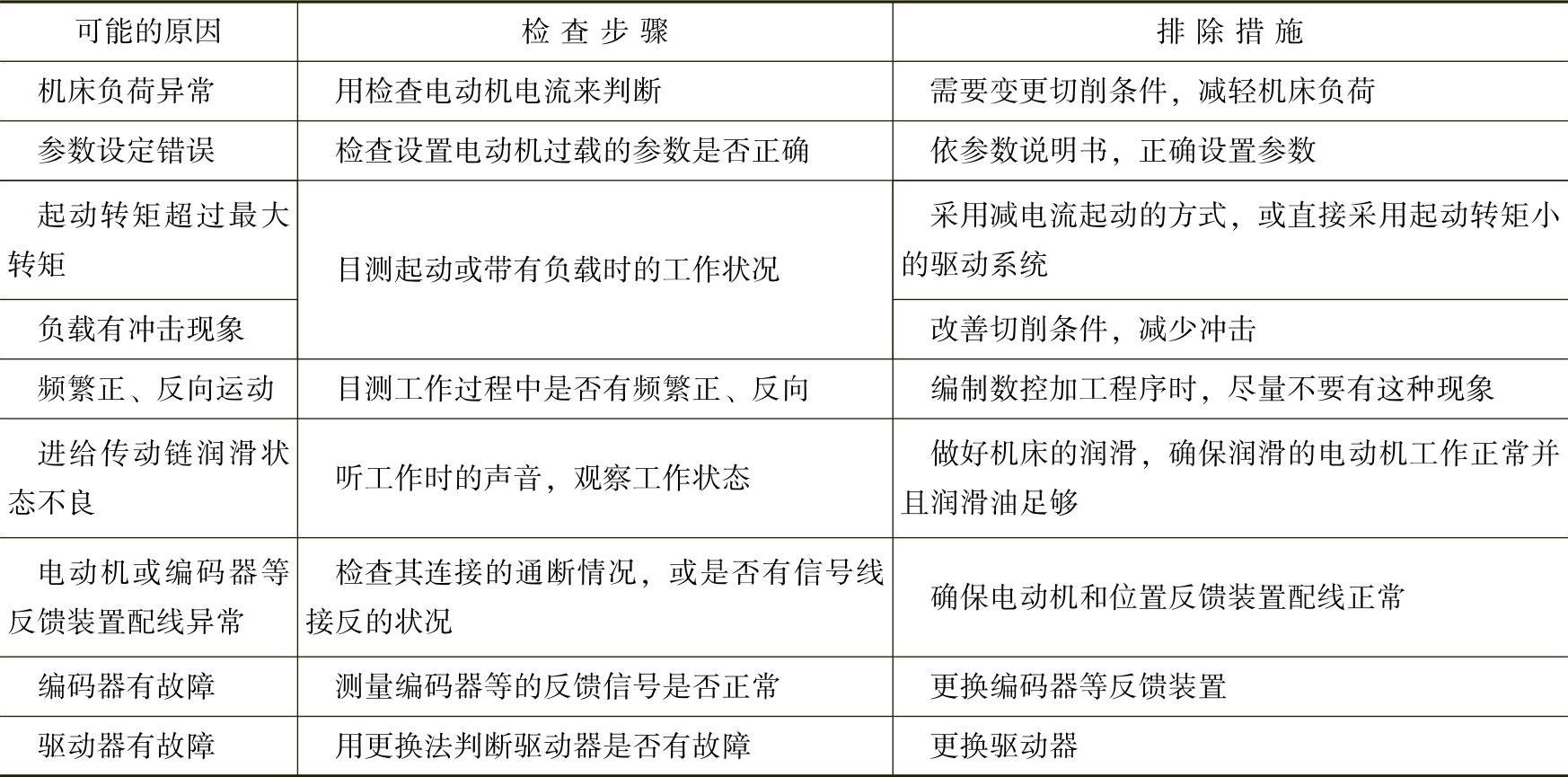
当进给运动的负载过大、频繁正、反向运动以及进给传动链润滑状态不良时,均会引起过载报警。一般会在CRT上显示伺服电动机过载、过热或过流等报警信息。同时,在强电柜中的进给驱动单元上,用指示灯或数码管提示驱动单元过载、过电流等信息。具体故障的原因及排除见表7-2。
表7-2 过载故障可能的原因及排除
3.振动
分析机床振动周期是否与进给速度有关:①如与进给速度有关,振动一般与该轴的速度环增益太高或速度反馈故障有关。②若与进给速度无关,振动一般与位置环增益太高或位置反馈故障有关。③如振动在加减速过程中产生,往往是系统加减速设定过小造成的。工作过程中,振动引起的故障的通常可能的原因及排除见表7-3。
表7-3 振动故障可能的原因及排除

4.爬行
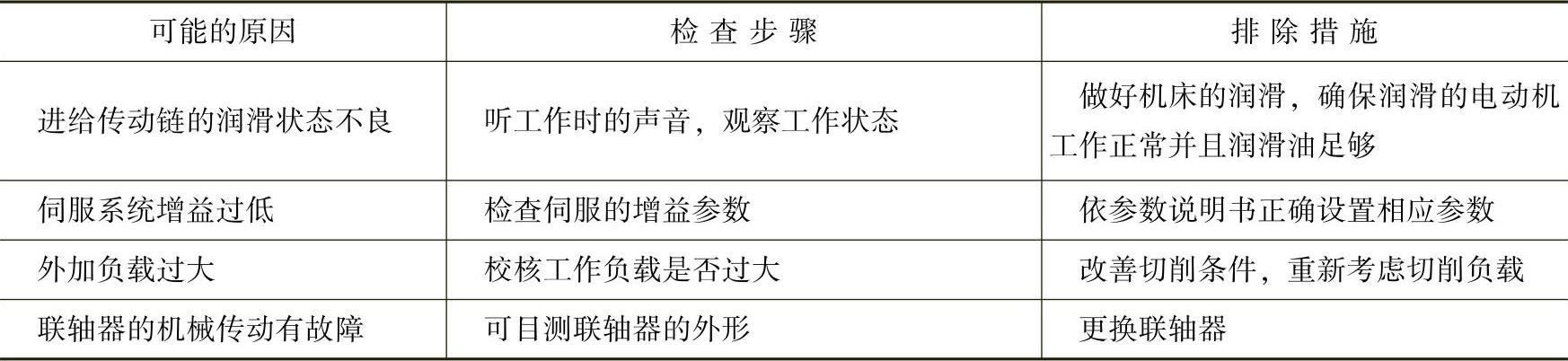
发生在起动加速段或低速进给时,一般是由于进给传动链的润滑状态不良、伺服系统增益过低及外加负载过大等因素所致。尤其要注意的是,伺服电动机和滚珠丝杠连接用的联轴器,由于联接松动或联轴器本身的缺陷,如裂纹等,造成滚珠丝杠转动和伺服电动机的转动不同步,从而使进给运动忽快、忽慢,产生爬行现象。其可能的原因及排除见表7-4。
表7-4 爬行现象的可能的原因及排除
5.窜动
在进给时出现窜动现象:①测速信号不稳定,例如测速装置故障、测速反馈信号干扰等;②速度控制信号不稳定或受到干扰;③接线端子接触不良,例如螺钉松动等。当窜动发生在由正向运动向反向运动的瞬间,一般是由于进给传动链的反向间隙或伺服系统增益过大所致。其可能的原因及排除见表7-5。
表7-5 进给过程中窜动可能的原因和排除
 (https://www.xing528.com)
(https://www.xing528.com)
6.伺服电动机不转
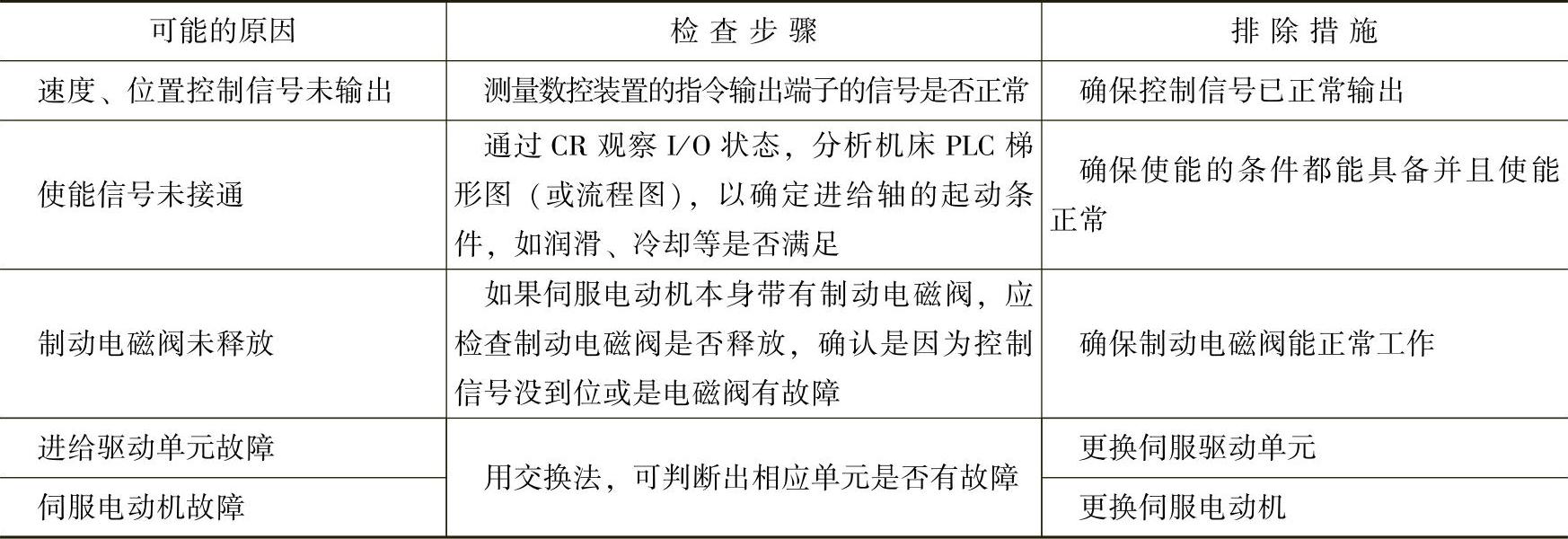
数控系统传至进给驱动单元的除了速度控制信号外,还有使能控制信号,一般为DC24V继电器线圈电压。①检查数控系统是否有速度控制信号输出。②检查使能信号是否接通。通过CRT观察I/O状态,分析机床PLC梯形图(或流程图),以确定进给轴的启动条件,如润滑、冷却等是否满足。③对带电磁制动的伺服电动机,应检查电磁制动是否释放。④进给驱动单元故障。⑤伺服电动机故障。造成伺服电动机不转可能的原因及排除见表7-6。
表7-6 伺服电动机不转的故障综述
7.位置误差
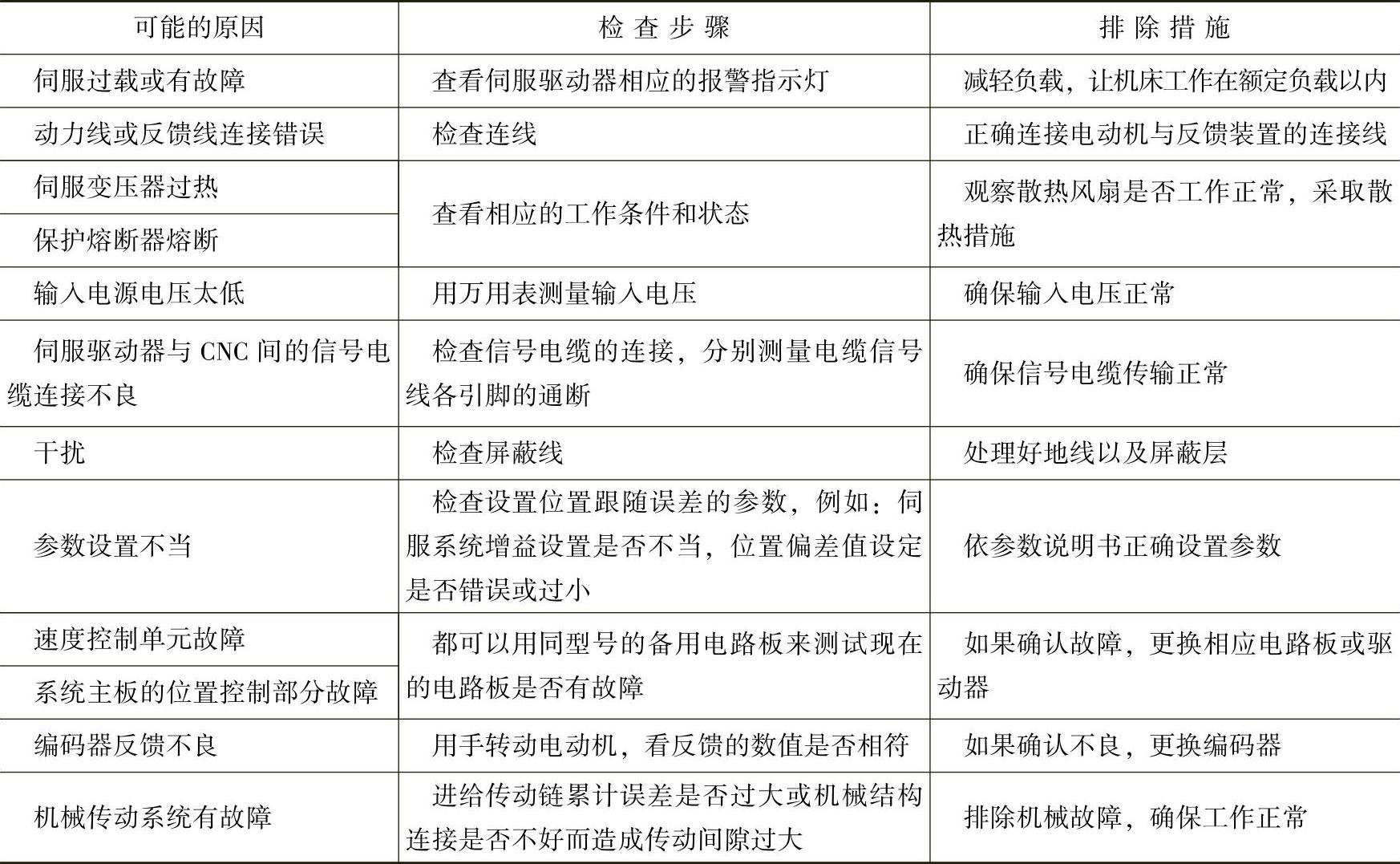
当伺服轴运动超过位置允差范围时,数控系统就会产生位置误差过大的报警,包括跟随误差、轮廓误差和定位误差等。主要原因:①系统设定的允差范围过小。②伺服系统增益设置不当。③位置检测装置有污染。④进给传动链累计误差过大。⑤主轴箱垂直运动时平衡装置(如平衡油缸等)不稳。报警的原因及排除见表7-7。
表7-7 位置跟随误差超差报警的原因及排除
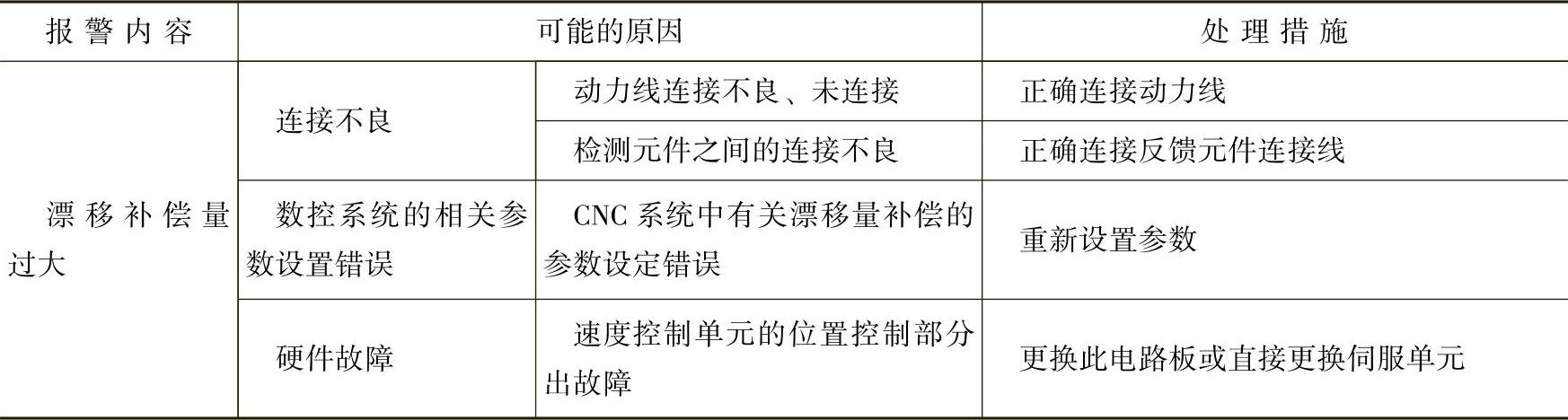
8.漂移
当指令值为零时,坐标轴仍移动,从而造成位置误差。通过漂移补偿和驱动单元上的零速调整来消除。引起此故障可能的原因及处理措施见表7-8。
表7-8 漂移补偿量过大的报警
9.回参考点故障
回参考点故障一般分为找不到参考点和找不准参考点两类。前一类故障一般是回参考点减速开关产生的信号或零位脉冲信号失效,可以通过检查脉冲编码器零标志位或光栅尺零标志位是否有故障。后一类故障是参考点开关挡块位置设置不当引起的,需要重新调整挡块位置。可能的原因见表7-9。
表7-9 回参考点故障可能的原因及排除措施

在全数字式的数控系统中,由于数控系统与伺服系统的通信联系,伺服系统的状态可通过数控系统的CRT来监控。表7-10为伺服监控参数的含义。
表7-10 伺服监控参数的含义

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。