



使用PID指令进行PID控制,虽只使用一个指令及作有关设定。但也还有一些细节要考虑与处理:
1.数据格式转换
尽管PID指令输入、输出用的格式为十六进制码,与模拟量输入、输出单元的数据格式是相同的,为使用PID指令提供了方便。但是,还是存在一些不那么对应的情况。如用脉冲作输入信号,其格式用的就不是十六进制码,而是BCD码。调宽脉冲输出,其格式用的也不是十六进制码,而是BCD码。而PID指令的输入(源字)、输出(结果字)都是十六进制码。这时,在使用PID前,要做一些数据格式转换,如必要也可能还要作比例换算,以便于执行PID指令时,使用有关数据。同时,在执行PID指令得出结果后,也要把这个结果值进行换算,以便于为有关输出使用。
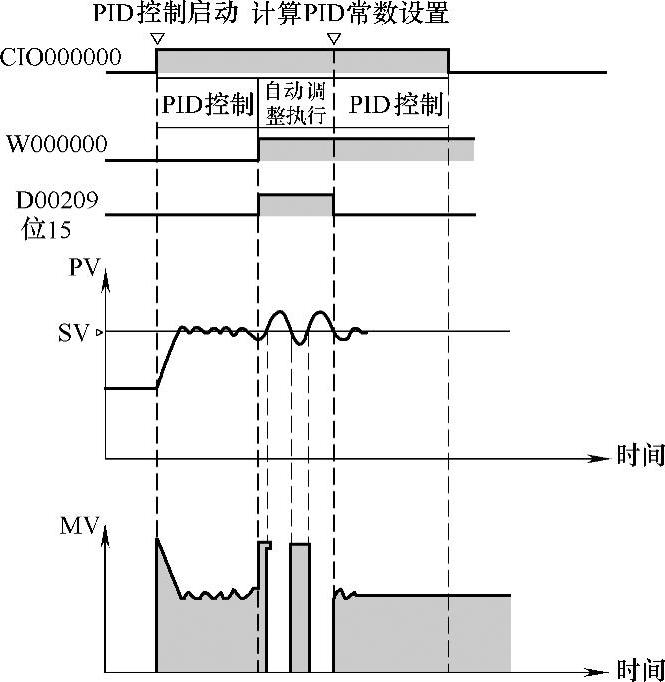
图4-56 PID参数自整定实际过程
把BCD码转换为十六进制码,可用BIN指令。反之,可用BCD指令。图4-57所示为有关转换指令的使用情况。图4-57a为执行PID指令前的转换,它把输入数据BCD码DM666转换为十六进制码数据DM716。用它作PID指令的原数据。图4-57b为执行PID指令后的转换,它把PID指令执行后的结果数据十六进制码DM718,转换为BCD码数据DM500,以作为实际控制输出。
PID指令执行后的转换,也可用SCL及SCL2两个指令。这两个指令的格式为
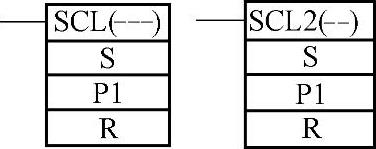

图4-57 数据转换梯形图程序
这里的S为原数据,R为结果数据,P1~P3为控制字。此两个指令的功能是:根据P1~P2制定线性关系,把不带(SCL)或带(SCL2)符号的十六进制数码数据(S)转换为BCD码数据(R)。图4-58显示了其间(用SCL)的关系。
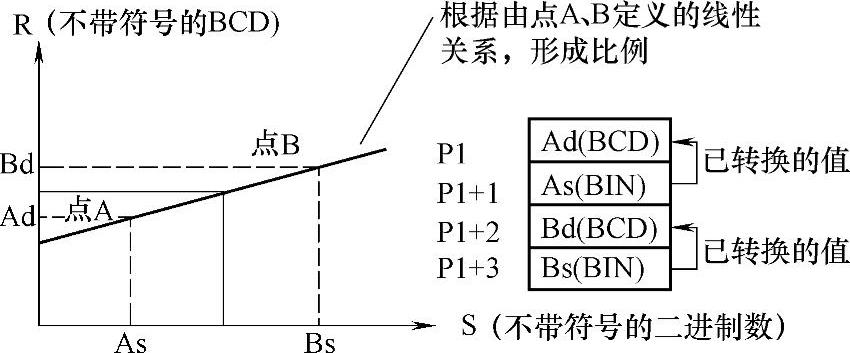
图4-58 用SCL指令实现转换后两数对应关系
PID指令执行前的转换,也还可用SCL3指令。这个指令的格式为
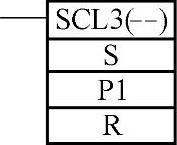
这里的S为原数据,R为结果数据,P1~P5为控制字。这个指令的功能是:根据指定线性函数,将有符号BCD码数据(S)转化为有符号十六进制码数据(R)。
控制字的含义及其取值为
P1:为偏移值,有符号十六进制数,取值范围为:8000~7FFF;
P2:为ΔX,BCD码,取值范围为:0001~9999;
P3:为ΔY,十六进制码,取值范围为:8000~7FFF;
P4:为最小转换,十六进制码,取值范围为:8000~7FFF;
P5:为最大转换,十六进制码,取值范围为:8000~7FFF。
其转换公式为

图4-59 显示了在正、0及负偏移情况下,其间的关系。(https://www.xing528.com)
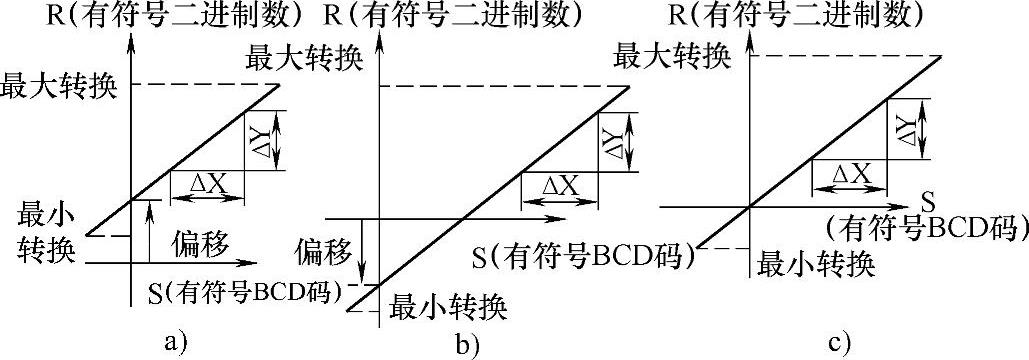
图4-59 不同的对应关系
a)正偏移 b)负偏移 c)0偏移
CJ1机还有静带控制指令BAND(681)及静域控制指令ZONE(682)。可分别用处理输入、输出死区问题。有关细节,可参阅有关说明书。
2.参数变换
执行PID指令,当偏差值不同时,所选的参数最好也有所不同。如比例带、积分常数等,在偏差大时,可选小一些,以强化它的作用。而偏差小时,或控制输出已将接近开环测定的数值,这些参数可与偏差大些,以弱化它的作用。图4-60所示即为此类程序。如图所示,当“偏差值1”大于4时,把250赋给DM901,500赋给DM902;反之,把20赋给DM901,50赋给DM902。这里的DM901、DM902分别为“比例带”、“积分常数”,正是PID控制参数。
但是,CS1机以前的PLC,一旦指令开始执行,参数改变将不起作用。为此,要对PID指令作再执行处理,即当参数改变时,先使执行PID指令的条件OFF,然后再令其ON。图4-61即为此类程序的一个。
从图知,当DM901、DM902的值改变时,LR1.01、LR1.02将OFF一个扫描周期,用此即可使新参数起作用。
3.输出值控制
尽管作了数据变换或转换,但有时,还是难以做到控制输出值与所驱动的对象完全适应。如有这样的情况,模拟量输出单元的输出范围为0~10V,而对象所用的控制输入只能为0~5V。这时就必须对输出值进行控制,如图4-62所示程序,当“输出值”大过50时,则用50传送给它,确保“输出值”不超过50。其程序如图4-62所示。
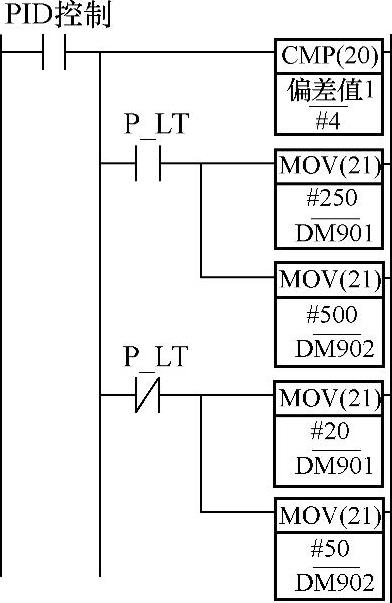
图4-60 参数变换梯形图程序

图4-61 使新参数立即起作用梯形图程序
CJ1机还有限幅指令LMT(680),也可用以作此类问题的处理。该指令的含义及其使用请参阅有关说明书。
4.手动、自动无扰动切换
实际系统除了自动控制,有时还要求手动控制。而且,这两者切换时,最好系统的控制输出不要突变,以免系统受到不应有的冲击。参数变化时也有这个问题。
怎么做到这一点呢?一般讲在两种情况下转换,冲击将少一些。即:在偏差值为0,或尽量小时转换;或控制输出值相等或接近相等时转换。
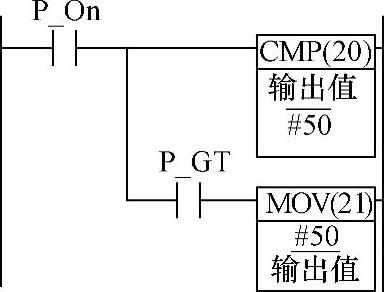
图4-62 输出值控制 梯形图程序
为此,在手动向自动转换时,可观测自动的给定值与实际值相差大否?太大时,应使其调到相接近时,切换。自动到手动转换,应使手动的输出初值设为当时自动的控制输出值。
5.多种控制算法配合使用
PID控制虽然有很多优点。但由于系统的非线性等诸多原因,完全用PID控制有时难以满足实际要求。所以,也可考虑依不同的偏差值,或依不同的工况,有时用PID控制,有时也可用别的控制。多种控制配合使用,以获得更好的控制效果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。