



设计运动控制程序还有一些细节需要正确处理。没有处理好将难以实现预想的目标。这些细节有:
1.累计误差
使用相对坐标的脉冲控制,每循环运行一次,有可能回不到原始位置,出现微小误差。反复多次运行,将使误差积累,以至超出控制精度的要求。为此,每次循环运行后最好能进行一次基准点的校正。
校正的方法是,使用精密行程开关监测基准点附近位置。当从一个预定的方向运动到此,它连接的输入点ON(或OFF)时,再继续前行,再到旋转编码器复位输入ON时,这时的位置就是基准点。这时,可激活运动初始化运动程序。这样,每次循环运行生成的误差,都将消除,不会积累。长期工作也可确保控制精度。
如果使用绝对坐标系统,则不必每个循环运行都做校正。只需开机时校正就可以了。
2.间隙消除
由于机械原因,运动系统间隙是不可避免的。这样一来,当运动变向时,将可能丢步。为此,完善的运动控制都有相应的间隙补偿手段。
补偿可以用硬件消除间隙实现,但完全没有间隙难以做到。最实际的还是用软件实现。办法是,在运动方向开始改变的时刻,多输出若干脉冲,先消除间隙,然后再正常反向运动。图5-71所示是一个程序实例。
图中梯形条3、4作为本周期输出方向的记录。如果方向改变的首次输出,如本例X轴方向改变,其输出脉冲将从正常的1个变为5个。当然,这个改变数,应根据实际间隙调整。
3.手动调整(https://www.xing528.com)
运动控制不仅要有正常的工作程序,还要有调整程序。前者多少联动,可自动工作。后者多手动,且功能单一。虽较简单,但也是必不可少。如上述基准点的处理,多用手动处理。
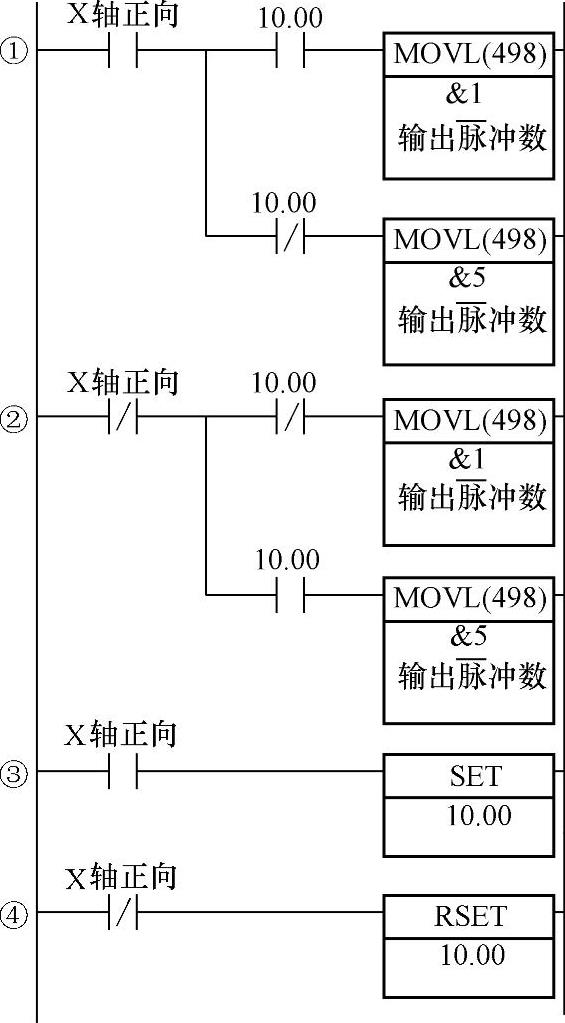
图5-71 间隙补偿程序实例
4.安全控制
运动控制系统工作速度较大,如果控制不当或系统失灵,容易出现安全问题。所以,对系统控制可能出现的安全异常,要心中有数,并通过附加程序予以控制。这些异常有:
(1)极限位置控制。运动部件不能在一个方向无限制的运动,在其极限一般要放置限位开关。一旦部件超出此位置,应控制其停止运动。或利用脉冲输出状态对运动控制做互锁。
(2)失步控制。使用步进电动机进行开环控制,有可能失步。对此,必要时也有措施。如使用步进电动机,脉冲频率不能超过允许值,并要保证脉冲发送完成后,再作新的输出。
(3)互锁。有时有多个部件,其运动是相互制约的。这时,就要按约束条件建立工作互锁,以确保部件工作安全。即使同一部件不同方向运动,必要时也要互锁。这在实际电气控制中是很常见的。PLC程序没有处理也可用电气系统处理。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。