



通过特定的测量设备和测量方法获取零件表面离散点的几何坐标,高效、高精度地实现实物表面的数据采集,是逆向工程技术实现的基础和关键技术之一。本系统对实体数据采集主要包括利用工业数字摄影测量提取高精度的标志点三维坐标和双目结构光扫描系统获取三维表面点云。
要测量工件复杂曲面的三维坐标,首先需要采用视觉测量技术,测量投影在工件表面的众多标志点的三维坐标,得到标志点点云表示的工件表面框架模型。为了有效地提高测量的精度,本文采用工业数字摄影测量系统来测量全局的标记点。工业数字摄影测量利用编码标记点完成不同相机位置坐标系的转换和不同图像标记点的拼装。由于坐标系的转换是在编码标记点匹配的基础上完成的,编码标记点的匹配误差与普通非编码标记点的匹配相比误差极小,降低了因标记点匹配所造成的图像拼接误差,该法能够很好地满足三维测量和其他实际工程应用的需求。
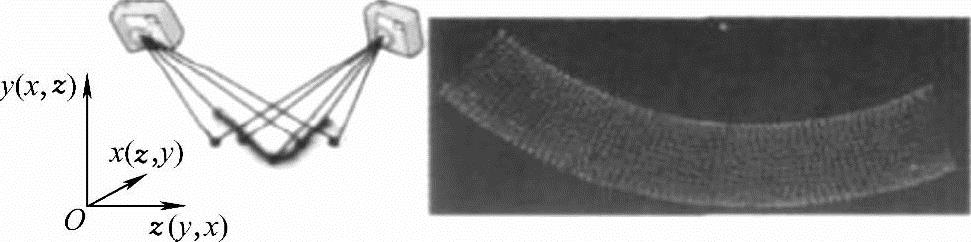
数字摄影三坐标测量系统从2个(或多个)位置拍摄同一工件,通过三角测量原理计算图像像素间的位置偏差(即视差)来获取被测点的三维坐标[13]。图4为摄影测量的测站分布和测量的标记点点云示意图。
 (https://www.xing528.com)
(https://www.xing528.com)
图4 设站分布及其测量点云3D图形显示 Fig.4 Station distribution and 3D measurement point clouds
对于不规则大型工件,由于单独利用摄影系统所拍摄影纹理信息不丰富,采用近景摄影测量方法不是三维重构数据采集的最佳方案。针对规则物体三维建模数据采集精度这一关键技术问题,本系统采用基于结构光的测量方法,在结合近景摄影测量的基础上,将测量得到的标记点坐标作为全局参考点,导入扫描测量模块,作为数据拼合计算的基准,将多次不同方位扫描数据拼合在一起,最终形成覆盖整个工件外形的点云数据。该方法继承了传统摄影测量方法和扫描测量技术的优点,可以精确地将有的特征点和表面信息云统一在一个世界坐标系下,准确获得工件表面丰富的纹理信息。
双目结构光扫描技术为工件型面的重构提供了可靠的数据保障[14],保证了重构建模的精度;双目结构光系统还可以使扫描仪在任何位置都可以被定位,降低了对扫描人员使用方式和现场条件的苛刻要求,满足了工业现场便携式使用的要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。