



电动执行机构是采用电动机和减速装置来位移阀门的执行机构。通常,电动执行机构的输入信号是标准的电流或电压信号,其输出信号是电动机的正、反转或停止的三位式开关信号。电动执行机构的特点是动作迅速、响应快、力矩可宽范围设定等。其主要技术指标:基本误差为±1%;回差为1%;死区为0.5%~10%可调;阻尼特性为无振荡;环境温度为-25~70℃;相对湿度<95%(无冷凝);防护等级为IP67(IP68可选)。
电动执行机构按位移可分为直行程电动执行机构(图3-42)、角行程电动执行机构(图3-43)和多回转式电动执行机构(图3-44),也可按输入信号与输出特性的关系分为比例式电动执行机构、积分式电动执行机构两类。
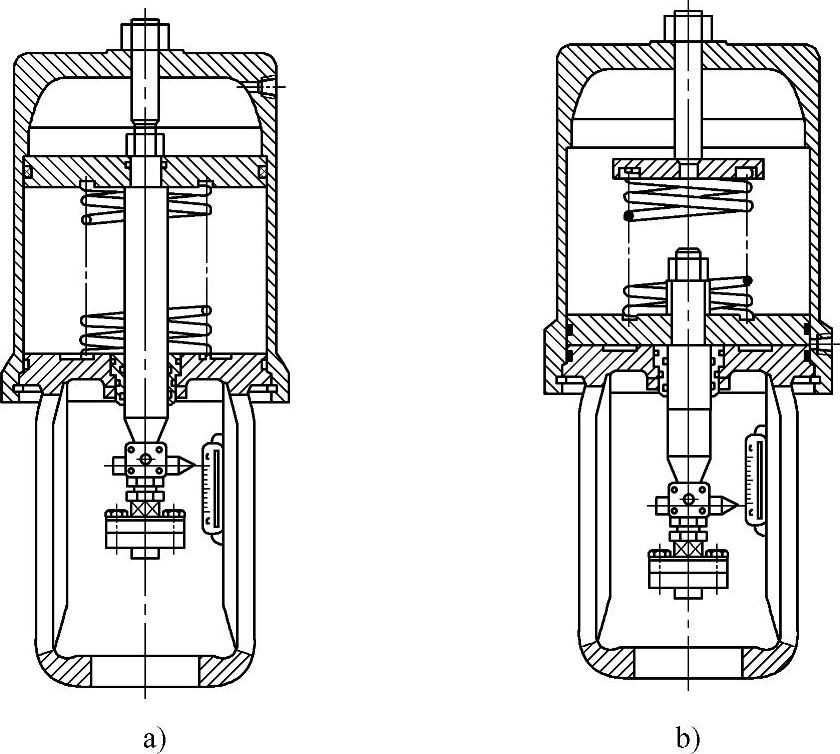
图3-41 气动活塞执行机构的正作用和反作用式
a)正作用式执行机构 b)反作用式执行机构
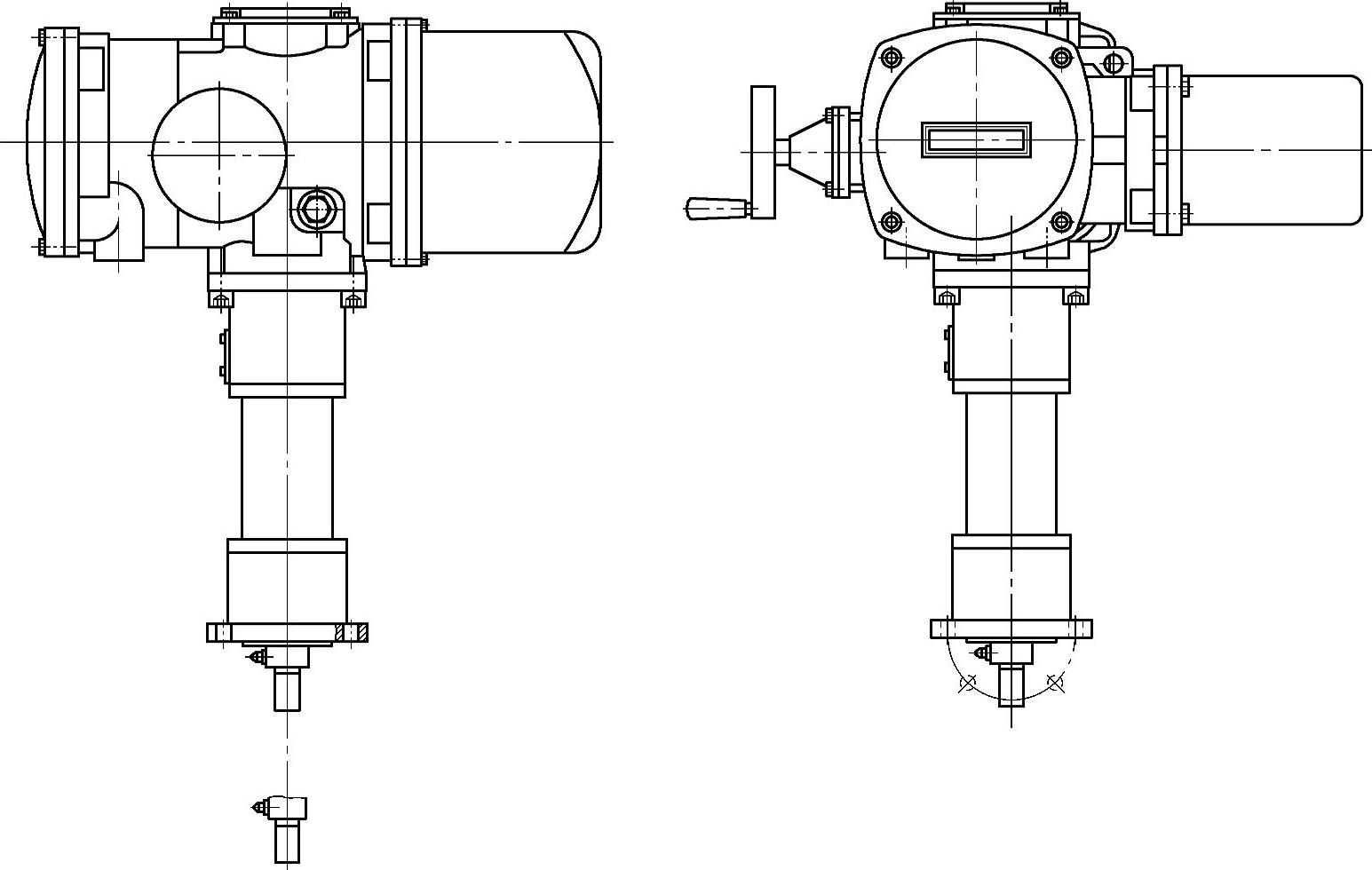
图3-42 直行程电动执行机构外形
三种不同类型的电动执行机构有不同的应用场合:直行程电动执行机构的输出轴输出各种不同的直线位移,通常用来控制单座阀、双座阀、三通阀、套筒阀、轴流式阀等各种调节阀;角行程电动执行机构的输出轴输出角位移,转角范围约为90°±5°,通常用来控各种类型的蝶阀、球阀、偏心旋转阀等各种调节阀;多回转式电动执行机构的输出轴输出各种不同的有效转数,通常用来控制各种类型的闸阀、截止阀、节流阀和旋转式的调节机构。
1.直行程电动执行机构
直行程执行机构最简单的一种结构,由丝杆和直齿轮构成,其结构原理如图3-45所示,当伺服电动机通电旋转时,旋转运动经齿轮、螺母和丝杠的传动,变为丝杠上下的直线移动,输出杆得到直线位移。图中的限位柱在限位槽中上下移动,起到导向作用。在主轴带动轮系旋转的同时,带动弹性联轴器。弹性联轴器中的钢球带动多圈电位器,并发出相应的阀位信号。
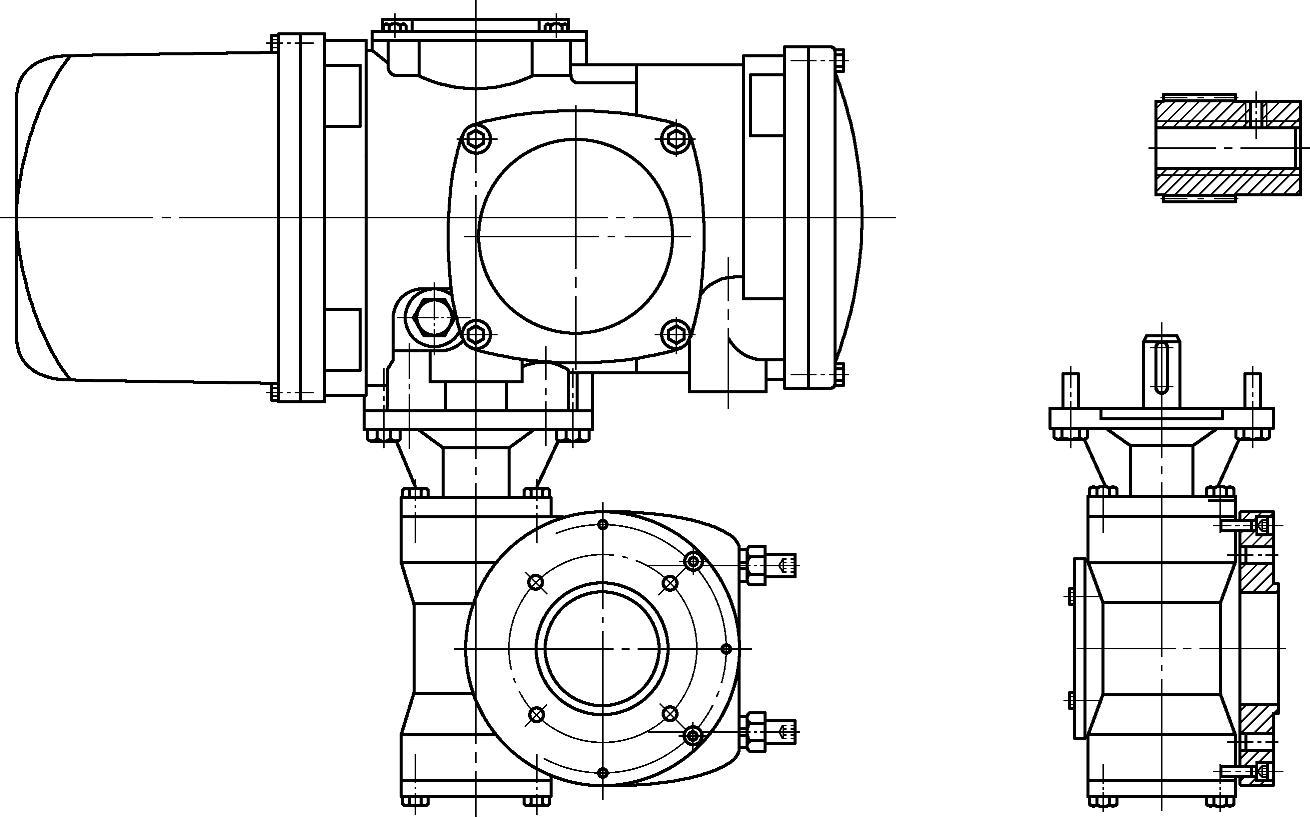
图3-43 角行程电动执行机构外形
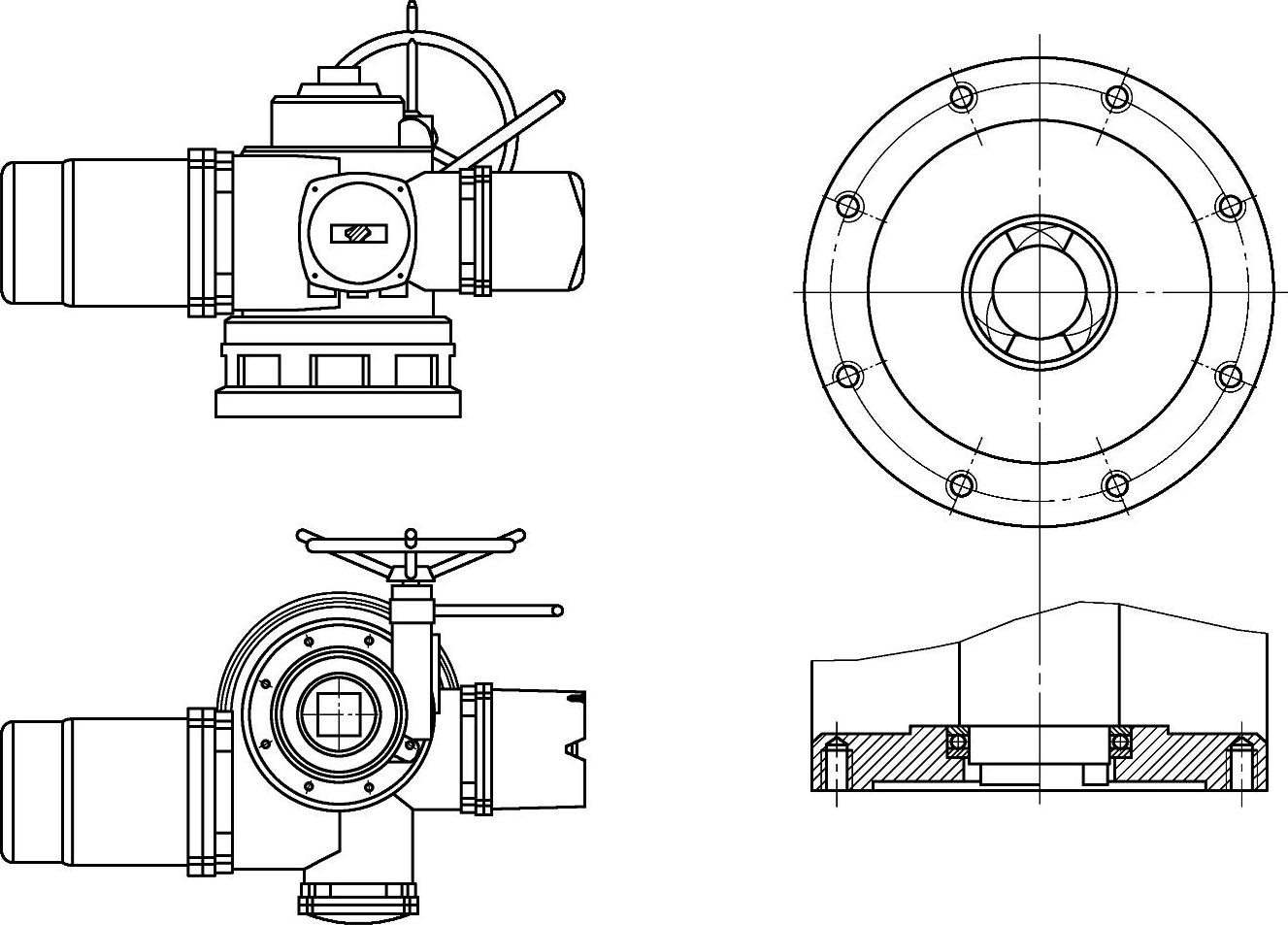
图3-44 多回转式电动执行机构外形
2.角行程电动执行机构
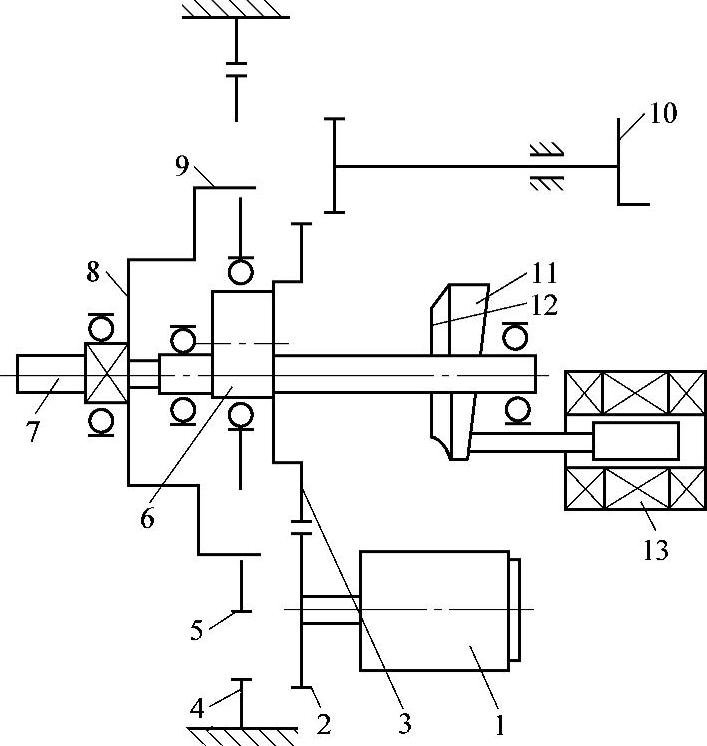
这种电动执行机构输出的转角范围在90°±5°,通常用于各种类型的蝶阀和球阀的启闭和调节的控制。图3-46所示为少齿差行星轮减速的电动执行机构,它是由伺服电动机、行星齿轮减速器、差动变压器等组成的。当伺服电动机通电旋转时,带动行星轮减速器减速。这种减速器具有减速比大、效率高、结构紧凑、体积小、质量轻等优点。
在差动变压器中,由于凸轮控制铁心的位移变化,能产生与输出轴位置相对应的位置信号,这个信号经整流和放大,成为标准直流信号,作为阀位指示和位置反馈信号。
这种执行机构可以自动操作,也可以手动操作。在信号中断时,自动操作机构脱开。利用手轮10转动带动手轮轴上齿轮,再啮合齿轮3,行星轮减速器又可带动输出轴。
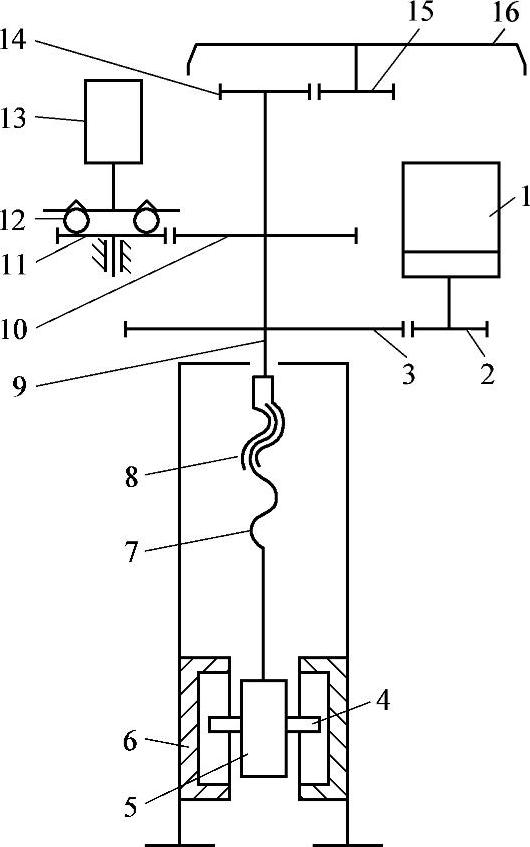
图3-45 丝杆和直齿轮构成的直行程执行机构
1—伺服电动机 2、3、10、11、14、15—直齿轮 4—限位柱 5—输出杆 6—限位槽 7—丝杠 8—螺母 9—主轴 12—钢球 13—多圈电位器 16—手轮
 (https://www.xing528.com)
(https://www.xing528.com)
图3-46 少齿差行星轮减速角行程执行机构
1—伺服电动机 2、3—直齿轮 4—内齿轮 5—摆轮 6—偏心轴 7—输出轴 8—联轴器 9—销轴 10—手轮 11—凸轮 12—弹簧片 13—差动变压器
3.多回转式电动执行机构
多回转式电动执行机构主要用启闭闸阀、截止阀、节流阀等多回转式控制机构。除了电动控制、手动控制外,还可以和电动驱动器、位置发信器等附件配套使用,可作为控制系统的自动控制装置。
图3-47所示为一种中等转矩的产品。该种多回转电动执行机构的蜗杆轴与蜗杆是用渐开线花键连接的。当蜗杆在轴向力F作用下产生位移时,蜗杆轴并不动作,这样对组装、维修十分方便,同时为手动、电动切换及手动机构在高速轴上设置提供了条件。
该种电动执行机构的手动及电动切换及手动操作机构设置在高速轴上,解决了产品转矩增大时手动电动切换力和手轮操作力的问题。
该种电动执行机构的驱动轴也有两种形式(2PC和1PC),并可组装成有空行程机构或无空行程机构。行程控制机构的运动引出也在低速轴上,但采用了8头蜗杆传动方式,8头蜗杆在驱动轴上位置如图3-48所示。这种运动传递形式较适合中等转矩产品,其运动传递平稳。
转矩控制机构是电动执行机构的关键控制部分,而多回转产品的转矩控制机构性能对整机可靠性影响更大。该种电动执行机构转矩控制机构也是利用蜗杆工作中的轴向力压缩碟形弹簧产生的位移来驱动转矩开关。碟形弹簧的压缩量与电动执行机构的输出转矩成正比。作为转矩控制机构一般可分为两部分,它们对电动执行机构控制转矩的品质均有影响。一部分是转矩信号的传出机构,另一部分是转矩控制开关本身结构。
图3-49所示为转矩弹簧结构,其特点如下:
1)采用了轴承座结构,其大外圈上加工成圆形齿条。当蜗杆的轴向力推或拉轴承座时,圆形齿条则驱动转矩开关轴旋转,其优点是转矩开关轴工作时不与高速旋转的蜗杆产生摩擦。
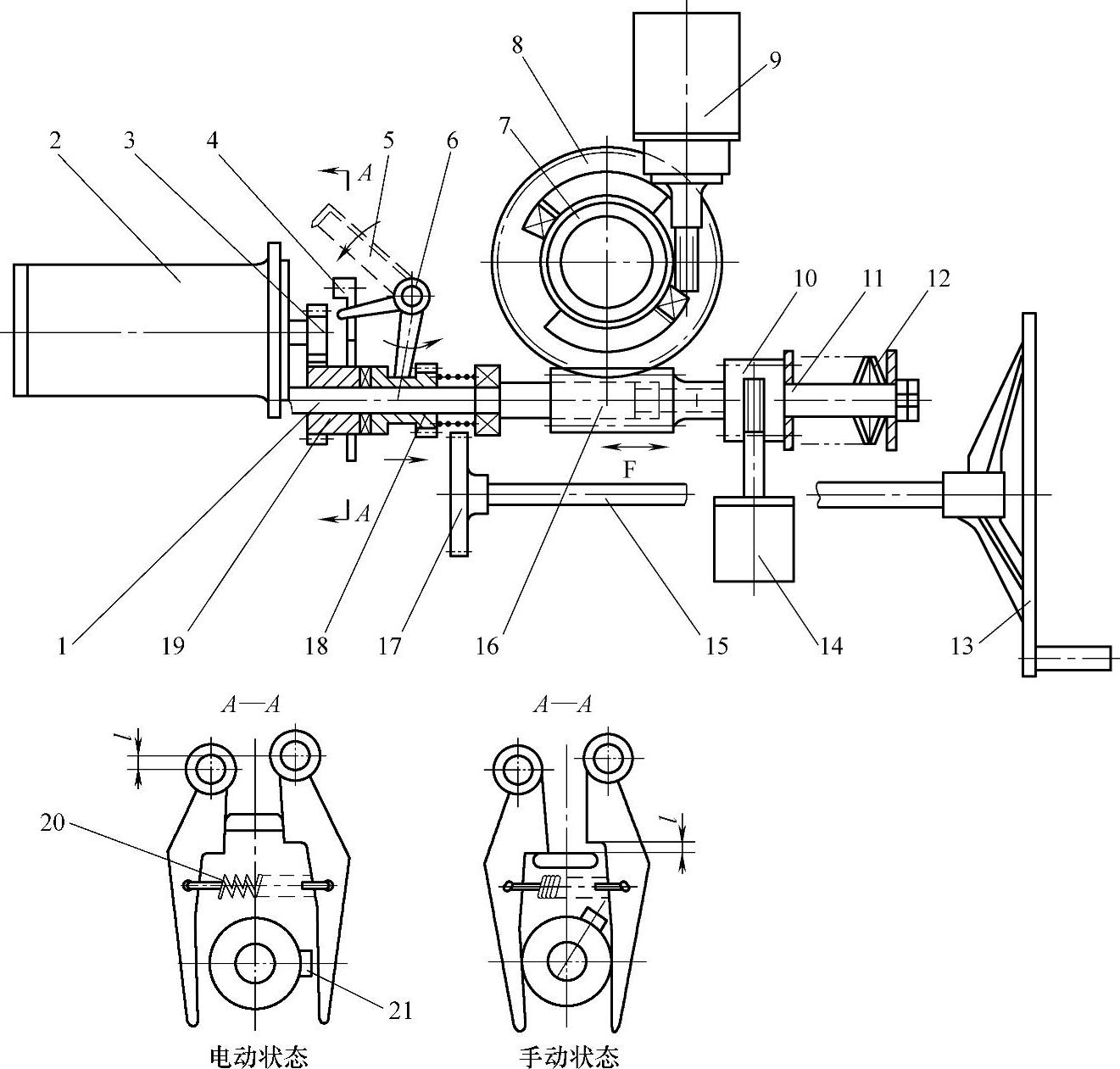
图3-47 多回转式电动执行机构原理图
1—蜗杆轴 2—电动机 3—电动机齿轮 4—分离杆 5—切换手柄 6—拨叉 7—驱动轴 8—蜗轮 9—行程控制机构 10—齿条 11—轴承座 12—碟形弹簧 13—手轮 14—转矩控制机构 15—手轮轴 16—蜗杆 17—手轮轴齿轮 18—离合器齿轮 19—蜗杆轴齿轮 20—拉簧 21—分离销
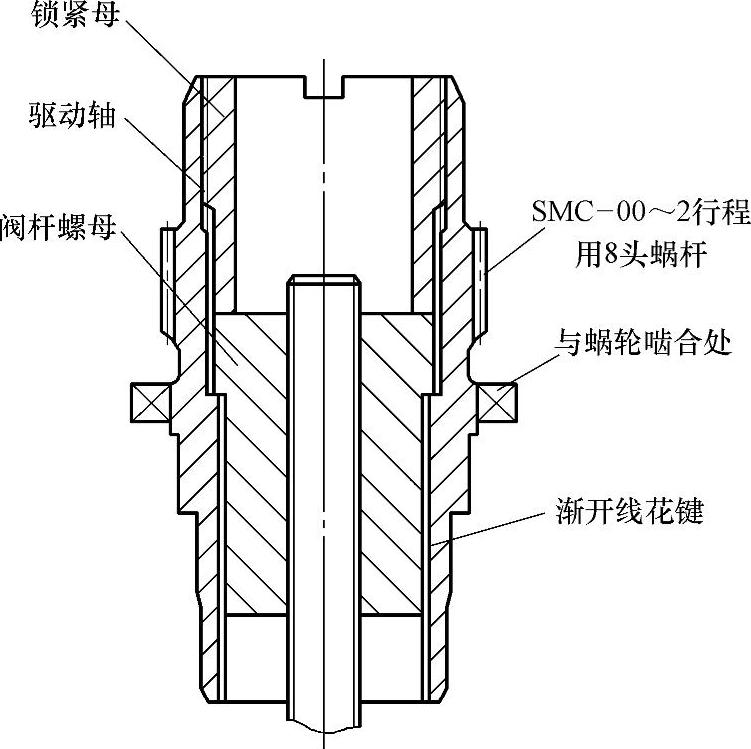
图3-48 2PC驱动轴结构
2)采用较小直径的转矩开关轴齿轮与齿条啮合,可获得较大的转矩开关轴转角,便于转矩开关的调整。
3)结构设计合理,碟形弹簧的调整和组装十分方便。采用深沟球轴承,双向均匀承受轴向力,并使结构尺寸较小。
4)采用两组碟形弹簧,一组为轻型弹簧,另一组为重型弹簧,最小控制转矩的调整十分方便。
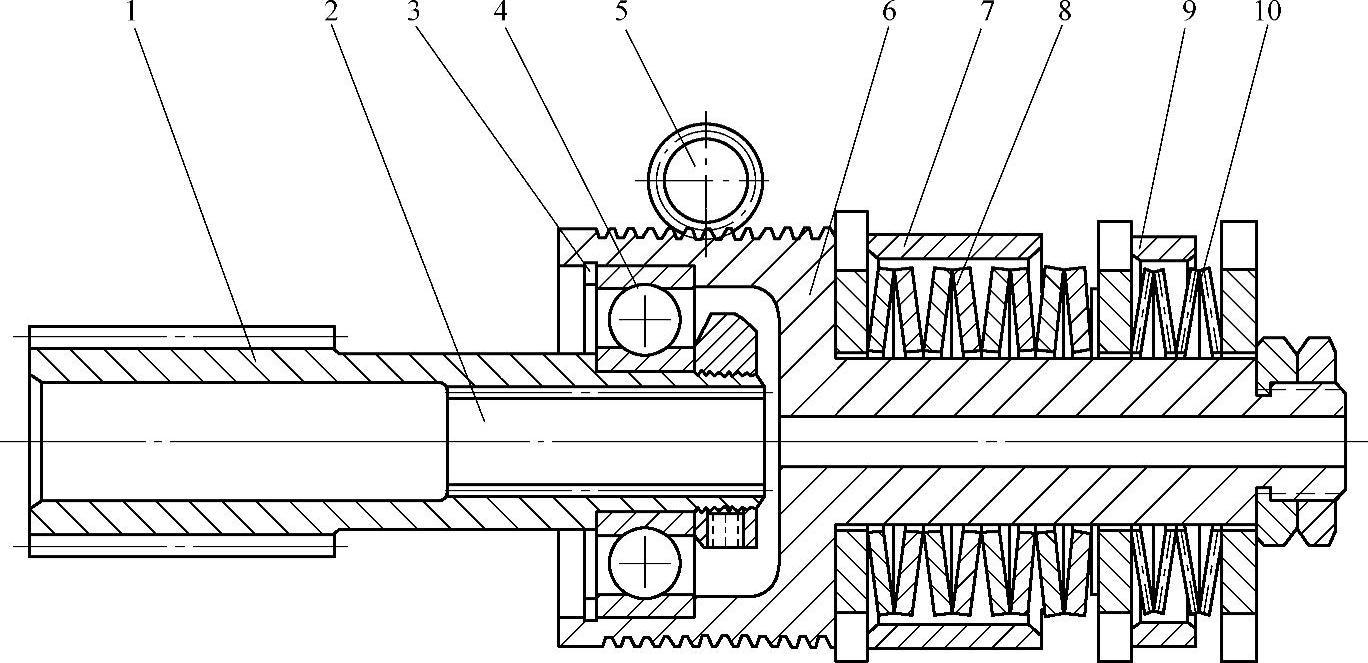
图3-49 转矩弹簧部套结构
1—蜗杆 2—蜗杆内渐开线花键 3—孔用弹性挡圈 4—深沟球轴承 5—转矩开关轴 6—轴承座 7—限位套 8—重型碟簧 9—限位套 10—轻型碟簧
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。