



图3-50所示为伺服型电动执行机构的结构,该伺服型电动执行机构是以两相交流伺服电动机为原动机的位置伺服机构,接收调节单元的输出信号,自动地操纵执行机构完成控制任务,广泛用于电力化工等行业的自动控制系统中。
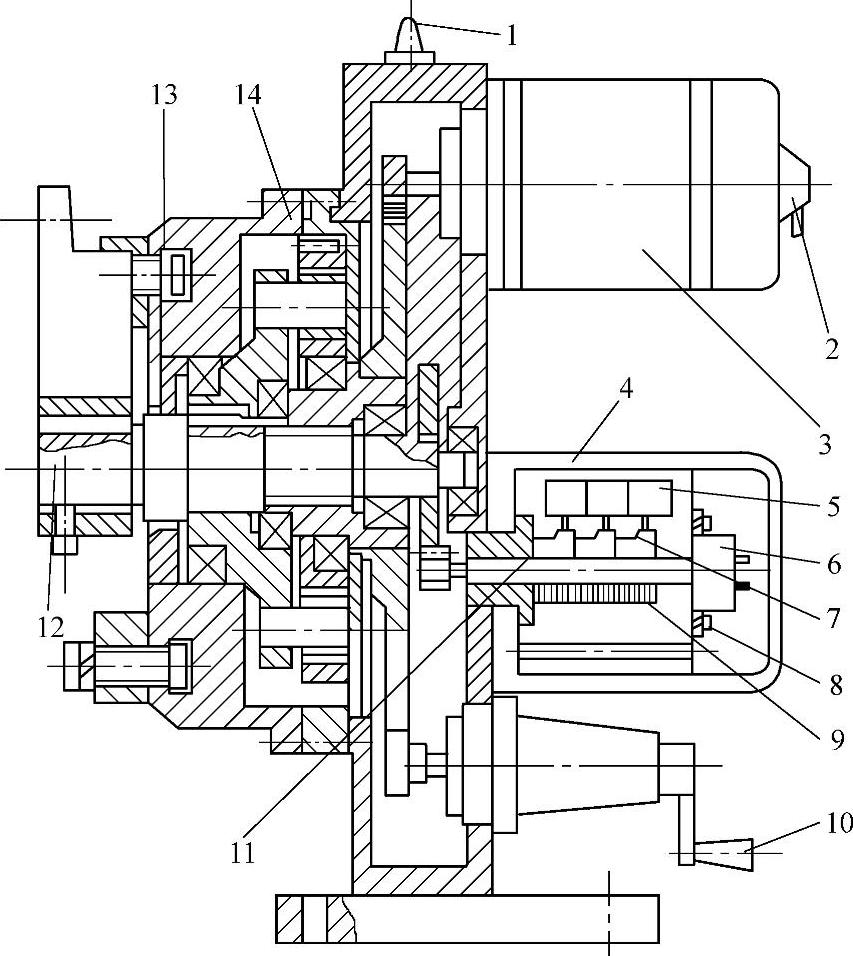
图3-50 伺服电动执行机构
1—吊环 2—手把 3—伺服电动机 4—位置发送器 5—微动开关 6—导电塑料电位器 7—凸轮 8—导电塑料电位器锁紧螺钉 9—凸轮紧固弹性机构 10—手摇柄 11—转轮 12—输出臂 13—输出轴 14—减速器
1.工作原理
当输入端有一个信号输入时,此信号与极性相反的位置反馈信号进行比较。比较后的偏差信号经过放大,使放大器功率级有足够的功率输出,驱动两相伺服电动机转动。电动机的输出转矩经减速器转变成低速大转矩输出,以带动阀门转动。减速器输出轴的转动方向总是朝着减少输入信号与位置反馈信号的偏差方向转动。当偏差信号为零(即小于放大器死区)时,减速器输出轴与阀门停止在与输入信号相对应的位置,从而完成一次调节任务。输入信号不断的变化,执行机构也不断跟随调整。
如图3-51所示,伺服电动机采用两相笼型结构,机组内装有制动器,采用杠杆旁磁式。当电动机通电时衔铁带动杠杆托起制动盘,使之与制动轮脱开,电动机转子能自由转动。当电动机断电时,衔铁被释放,在弹簧作用下制动盘压在制动轮上,制动电动机。
如图3-50所示,减速器采用标准渐开线少齿差结构,具有体积小、传动平稳、噪声低、寿命长和维修简单等特点。
位置发送器采用高寿命的精密导电塑料电位器作为位置检测元件,其电压电流转换电路采用二极管隔离等措施,大大提高了电路的抗感应电压能力。行程控制采用大功率微动开关作极限位置及中限位开关。
凸轮调整机构采用各自独立的弹性牙嵌机构,使凸轮既能单独连续调整,又能克服一些厂家生产的位置发送器存在的凸轮之间互相影响、锁定困难的缺陷。
2.主要技术参数
1)输入信号为4~20mA的直流信号或0~10mA的直流信号。(https://www.xing528.com)
2)输入通道为3个。
3)输入通道阻抗,Ⅲ型的为250Ω;Ⅱ型的为200Ω。
4)输出力矩为100~10000N·m。
5)全行程时间为25~160s。
6)基本极限误差为±2.5%。
7)回差≤1.5%。
8)死区≤3%。
9)阻尼特性≤3次半周期。

图3-51 伺服电动机结构
1—手把 2—动轮 3—制动盘 4—调节螺钉 5—导杆 6—衔铁 7—定子
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。