



在电动执行机构中,阀门的开启和关闭速度、传动轴的转动力矩,决定于电动机的转速、功率和传动机构的传动比。当载荷恒定时,由于闭路阀突然停止转动,电动机传动轴的转动力矩会因为电动机转子的动能作用而急剧增加。为了限制力矩,采用离合器或过电流保护继电器。
在进行离合器的受力计算时,最重要的是凸轮机构的计算。图6-19所示为作用在凸轮机构上的力。这是凸轮机构的凸轮顶住离合器上的圆盘工作时情况。当转动力矩达到一定数值时,圆盘转动压缩弹簧,而心轴(滚子)被压退,并沿着构成平面之圆盘的边缘滑动。
为了具有必需的力矩,并尽可能使其数值保持恒定,因而问题在于确定必需的弹簧作用力、盘件的半径和凸轮的外形。
沿着垂直的轴心线方向的弹簧作用力Fn,由切线为A—A的倾斜面所承受。切线A—A与弹簧作用力和心轴的引导方向成90°+α角。弹簧的作用力Fn可以分解为作用于轴线上的力Fr和FN,并且FN与心轴引导方向的反作用力和盘件上的反作用力FR相抵消。
圆盘上的作用力FN,可以分解为Fn和F,其中F=Fntanα。
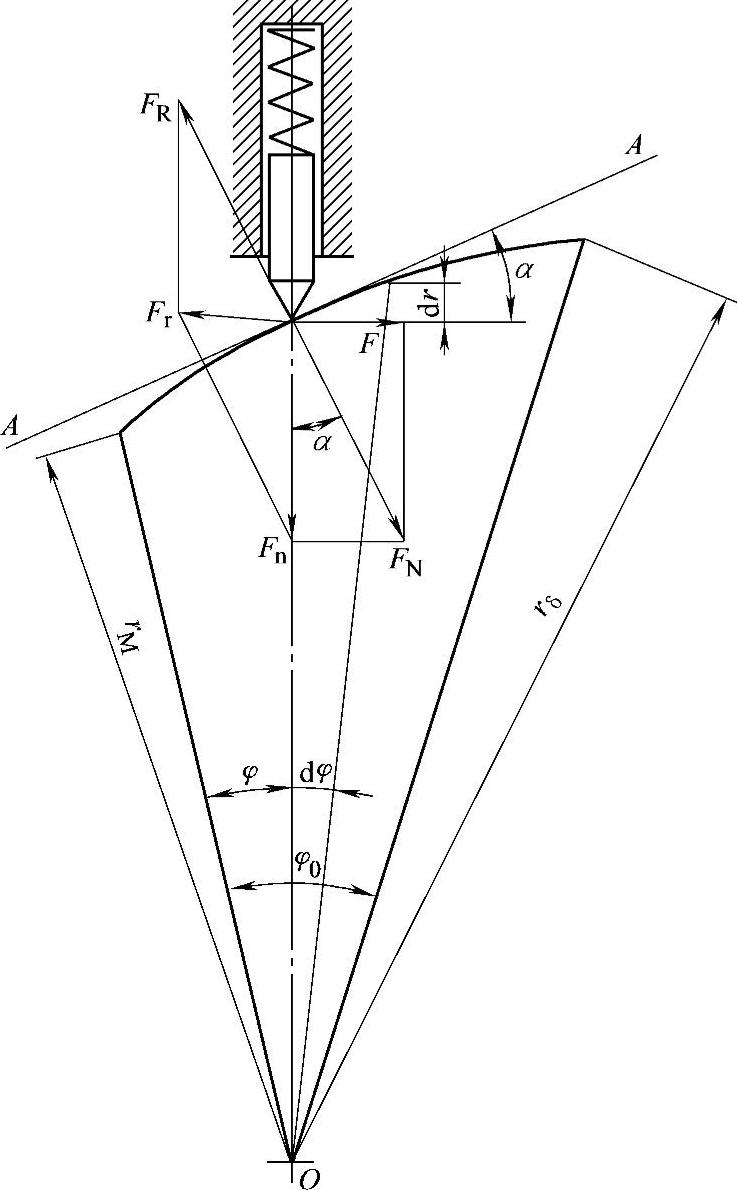
图6-19 作用在凸轮机构上的力
由于力Fn而作用于圆盘上的力矩为
M=Fnrtanα
可以利用圆盘和心轴(滚子)的功率恒等式求出力矩M:
Mω=Fnv
故 
式中,v为垂直心轴(滚子)的移动速度;ω
为圆盘的旋转角速度。
但 v=vr+tanφ
式中,vr为圆盘上M点的圆周速度。
因为 vr=rω
故有 v=rωtanφ
由此可得
假如r和φ为已知,则利用此式很方便。
由于  和
和
故 
所以 
由此得出
rM含义如图6-19所示。
由此可见,若需M和Fn为恒定值,凸轮工作外形应做成阿基米德螺旋线。
在实际条件下,弹簧作用力Fn随着弹簧的刚度和挠度而改变。
假定弹簧作用力为FM时,心轴(滚子)相应位于半径rM处,而rδ处的作用力相当于Fδ,则弹簧的刚度为
由此得 Fn=FM+λ(rδ-rM)
则 
或 Mdφ=[FM+λ(rδ-rM)]drδ
微分后得 
由rδ=rM的条件,在φ=0时确定常数k,得
故 
凸轮外形方程式可写成如下形式:

由此得 
利用式(6-13)可绘制出凸轮外形。弹簧的刚度和挠度基本上可由以下公式确定:
弹簧刚度 
在作用力由FM到Fδ范围内的弹簧挠度为:
其中  (https://www.xing528.com)
(https://www.xing528.com)
压力角α的计算式为
通常凸轮机构有心轴(滚子),因此所作出的曲线可以看作是心轴(滚子)中心的运动轨迹,而凸轮的外形做成其距离等于心轴(滚子)半径的等距曲线。
可以用通过三点的近似圆弧来代替准确的曲线。绘制用来代替准确曲线的半径为
R2=ρ2+r2c-2ρrccosφc
其中 
rc的数值可以用r和 代入公式确定。
代入公式确定。
设计控制转矩离合器时,最好使用阀门开启时所限用的力矩,比关闭时大20%~25%。这样可以考虑到静摩擦因数的作用,保证阀门可靠开启。
端部凸轮的外形应设计成螺旋线形,其剖面形状与在其上滚动的滚子相适应。
不考虑过载和电动机转子起动能作用的静力计算时,电力执行机构的受力计算可以归结如下:
1)确定必需的传动减速装置的总传动比i:

式中,n为电动机转速(r/min)(在正常载荷情况下);nB为控制阀门传动轴转速(r/min)。
根据传动齿轮的对数与结构,总传动比可以分解为符合下述条件的传动比:
i=i1i2i3…in
式中,i1、i2、i3、…、in为单级传动比。
2)根据减速器类型、传动比,以及工作性质(是否有油槽、非封闭传动等),确定其传动效率:
η=η1η2η3…ηn
式中,η1、η2、η3、…、ηn为单级传动效率。行星机构传动的效率,不等于任意单个传动效率的组合。
阀门传动机构计算中,采用一对齿轮时的效率值见表6-13。
表6-13 阀门计算中采用一对齿轮时的效率值

3)确定电动机所必需的功率。对于阀门的传动,最常采用高转差率AOC型封闭环吹式三相异步电动机。这种电动机最适宜于带冲击载荷的周期性工作。
图6-21所示为三相异步电动机的机械特性曲线。从图中可以看出,转速n取决于旋转力矩M,而旋转力矩取决于转差率S。
转差率S的计算式为
式中,nC为取决于电流频率(每秒钟周数)和电动机磁极圈数的同步转速;n为实际转速。
当同步转速nC=1500r/min时,随着电动机功率的不同,AOC型电动机在公称功率时,nN=1300~1395r/min。
图6-20a的图线n=f(M)示出,异步电动机容许有比公称转矩MN较大的超载力矩。对于所述及的电动机,其起动力矩可超为公称力矩2.2~2.3倍,即
MQ=(2.2~2.3)MN
最大转矩Mmax大于公称力矩2.3~2.6倍以上。因为在闭路阀内,最大载荷产生于阀门关闭的末期,或开启的初期,而且这个时间通常甚短。电动机的选择最好考虑到过载系数Kn,其值见表6-14。
图6-20 三相异步电动机的特性曲线
a)n=f(M) b)M=φ(S)
表6-14 过载系数Kn

电动机的功率P(kW)可按式(6-14)计算:

式中,MB为传动轴的输出力矩(N·m);nB为传动轴的转速(r/min);η为传动装置的总效率。
为了经济起见,电动机的功率可按式(6-15)计算:

式中,PP为电动机的计算功率(kW)。
根据所得出的功率PB,按产品目录选用具有与计算功率相近的电动机。但所选用的电动机的功率不得小于PP的20%,在有的情况下,应该选用功率比PB大的电动机。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。