



【摘要】:伸缩机构是一种多级式伸缩起重臂伸出与缩回的机构。图3-13所示为伸缩臂机构液压回路。连同上一步序,可将3节节臂总长增至最大,将重物举升至最高位。图3-13 伸缩臂机构液压回路4)手动换向阀仍为右位,电磁阀换左位,液压缸1下腔压入液体,缸体运动将臂Ⅱ相对于臂Ⅰ缩回,负重下降,需平衡阀起作用。
伸缩机构是一种多级式伸缩起重臂伸出与缩回的机构。图3-13所示为伸缩臂机构液压回路。臂架有三节:Ⅰ是第1节臂,也称基本臂;Ⅱ是第2节臂;Ⅲ是第3节臂。后一节臂可依靠液压缸相对前一节臂伸出或缩回。3节臂只要两只液压缸:液压缸的活塞与基本臂Ⅰ铰接,而其缸体铰接于第2节臂Ⅱ,使Ⅱ相对Ⅰ伸缩;液压缸的缸体与第2节臂Ⅱ铰接,而其活塞铰接于第3节臂Ⅲ,使Ⅲ相对于Ⅱ伸缩。第2和第3节臂是顺序动作的,对回路的控制可依次做如下操作:
1)手动换向阀在左位,电磁阀也在左位,使液压缸1上腔压入液体,缸体运动将第2节臂Ⅱ相对于基本臂Ⅰ伸出,第3节臂Ⅲ则顺势被Ⅱ托起,但对Ⅱ无相对运动,此时实现举重上升。
2)手动换向阀仍在左位,但电磁阀换至右位,液压缸因无液体压入而停止运动,Ⅱ对Ⅰ也停止伸出,而液压缸2下腔压入液体,活塞运动将Ⅲ相对于Ⅱ伸出,继续举重上升。连同上一步序,可将3节节臂总长增至最大,将重物举升至最高位。
3)手动换向阀换为右位,电磁阀仍为右位,液压缸2上腔压入液体,活塞运动,臂Ⅲ相对于臂Ⅱ缩回,负重下降,故此时需平衡阀起作用。(https://www.xing528.com)
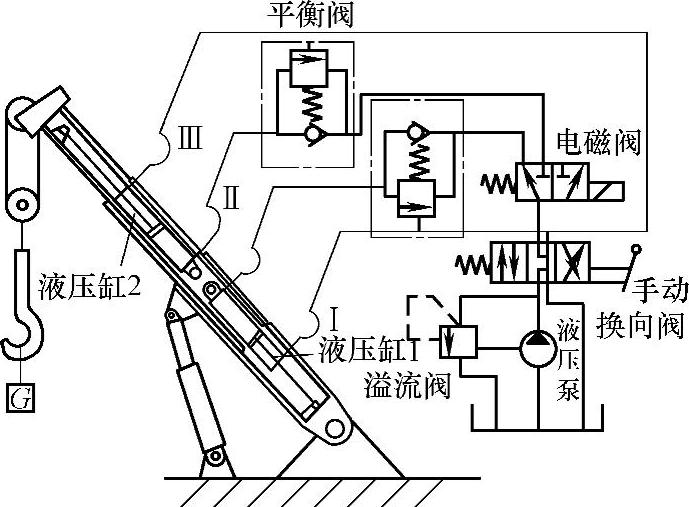
图3-13 伸缩臂机构液压回路
4)手动换向阀仍为右位,电磁阀换左位,液压缸1下腔压入液体,缸体运动将臂Ⅱ相对于臂Ⅰ缩回,负重下降,需平衡阀起作用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。