



吊臂是起重机在起重作业时的又一主要受力件。各节臂间(上、下、两侧)由滑块支承,中小吨位起重机依靠伸缩缸和粗、细拉索(大吨位起重机采用单缸插销式伸缩机构)保证吊臂的伸缩。吊臂伸缩时,滑块与吊臂之间有相对摩擦运动。两相对运动的吊臂之间的滑块间隙调整不均匀或润滑脂涂抹不均匀,都会造成吊臂伸缩时发生抖动、伸出后旁弯等现象;若细拉索装配不可靠或不预紧,都会造成细拉索掉道、挤伤或拉断,势必影响到整机性能质量。
1.伸臂机构分类
汽车起重机伸臂机构主要分为伸缩式箱形吊臂、桁架式吊臂和椭圆形吊臂三种,其中椭圆形吊臂是最为先进的一种,如图5-4所示。
图5-4 椭圆形吊臂外形图
2.伸缩机构
汽车起重机伸缩机构主要分为同步伸缩式机构、顺序伸缩式机构、顺序加同步伸缩式机构和单缸插销式机构四种,其中后两者在移动式起重机上应用最为广泛,图5-5所示即为单缸插销式伸缩机构示意图。
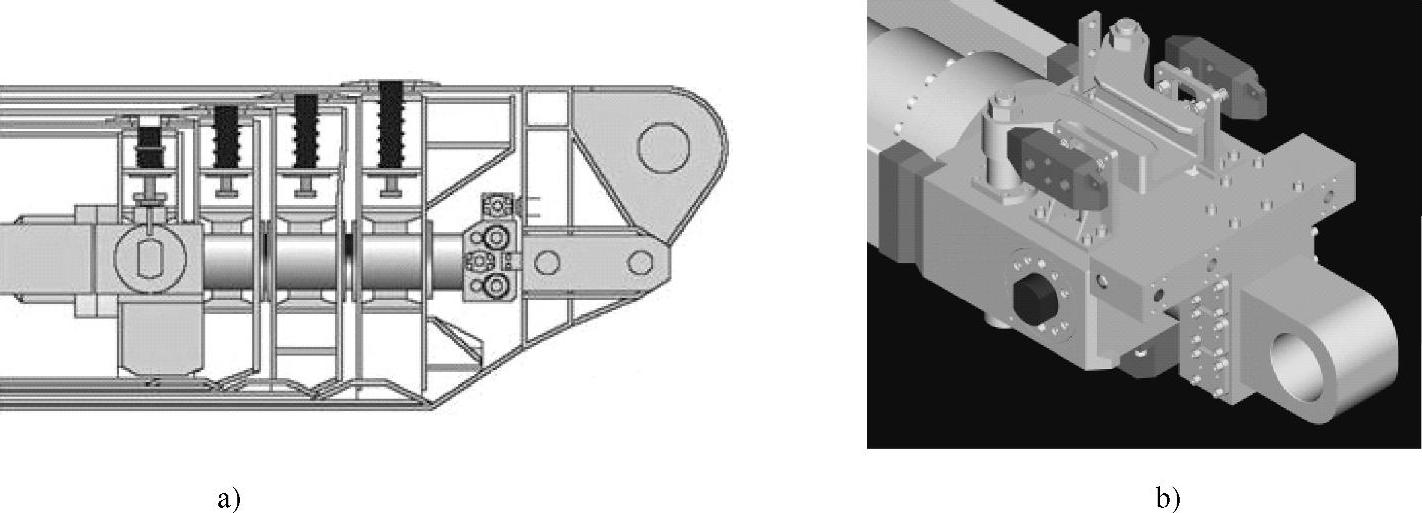
图5-5 单缸插销式伸缩机构示意图
3.滑块的位置分布
汽车起重机伸臂的两臂筒之间都安装有滑块装置,主要分布在起重臂的臂头和臂尾位置,如图5-6所示。
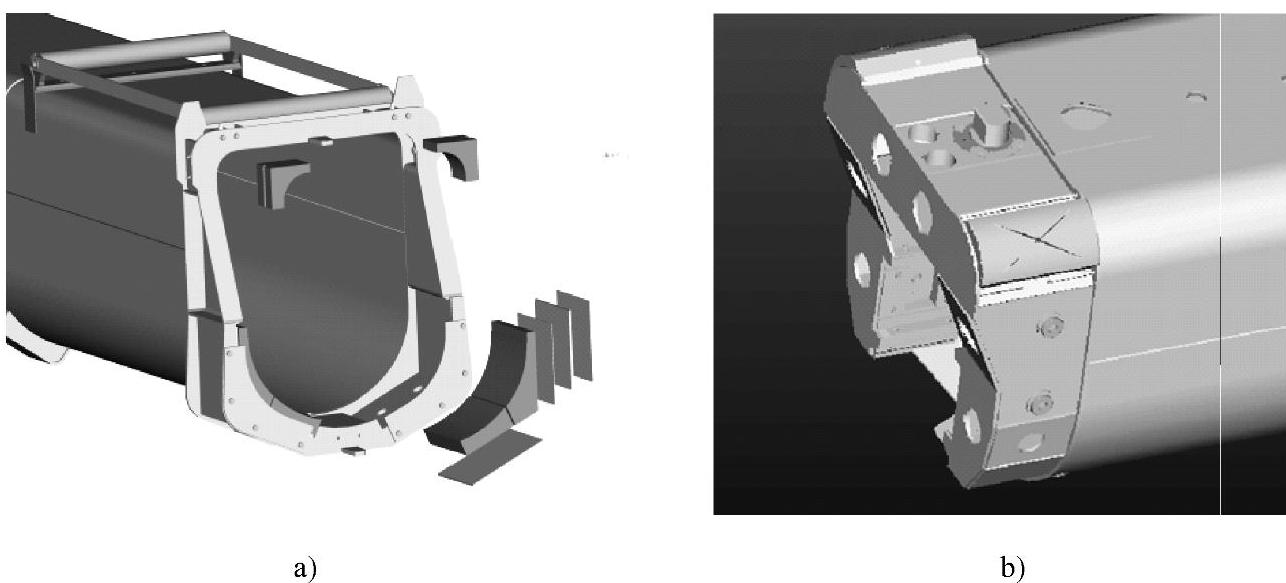
图5-6 滑块在起重机臂头和臂尾位置示意图
a)臂头滑块 b)臂尾滑块
4.伸臂结构维修装配与注意事项
(1)粗拉索维修装配 将两根粗拉索Ⅱ分别从四节臂尾部两侧孔中穿入,从四节臂头部穿出,再分别挂在五节臂后尾两侧的轮子支架上,将轮子、销轴装配在支架上,在臂尾内侧用轴挡板及螺栓紧固。在支架前后分别装上导轨和滑块。粗拉索维修装配如图5-7所示。
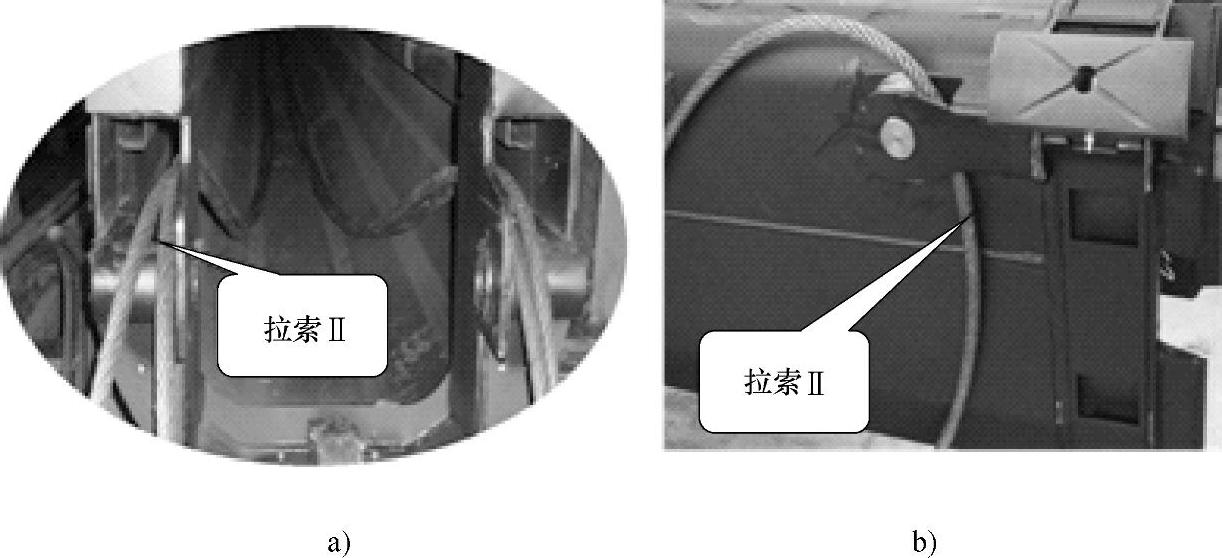
图5-7 粗拉索维修装配
a)四节臂尾部 b)五节臂尾部
(2)四、五节臂维修装配 四、五节臂维修装配时,要保证粗拉索Ⅱ上面两根拉索位于导轨上,拉索没有打绞现象。四、五节臂维修装配如图5-8所示。
(3)伸缩缸缸头支架机构维修装配 伸缩缸缸头支架机构维修装配主要包括导向支架、一根细拉索Ⅱ、两根粗拉索Ⅰ和伸缩缸导向轮的装配,如图5-9所示。
(4)四、五节臂与下缸组件维修装配(图5-10)
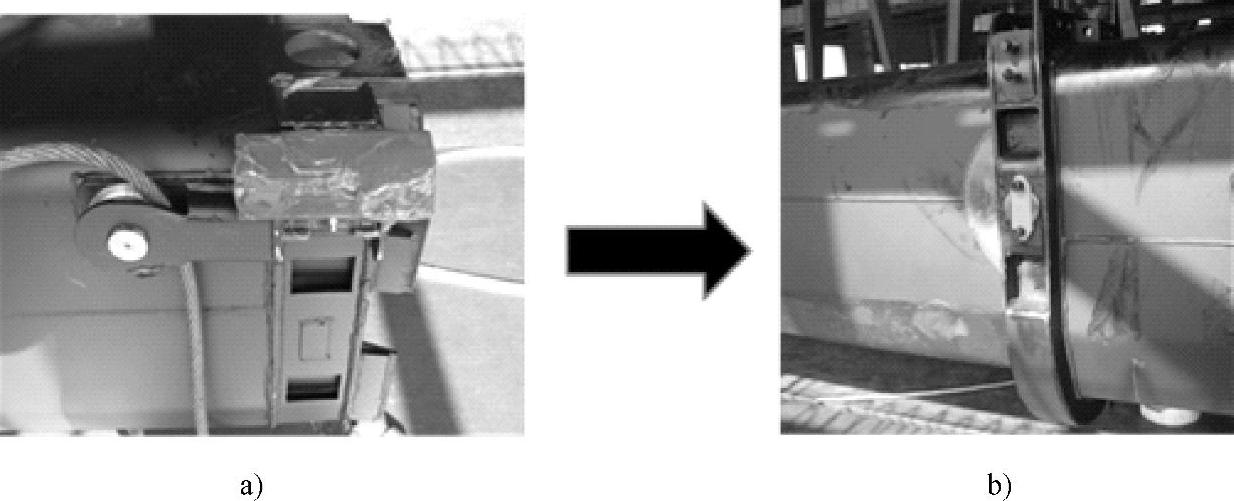
图5-8 四、五节臂维修装配
a)五节臂尾部 b)五节臂送入四节臂头部
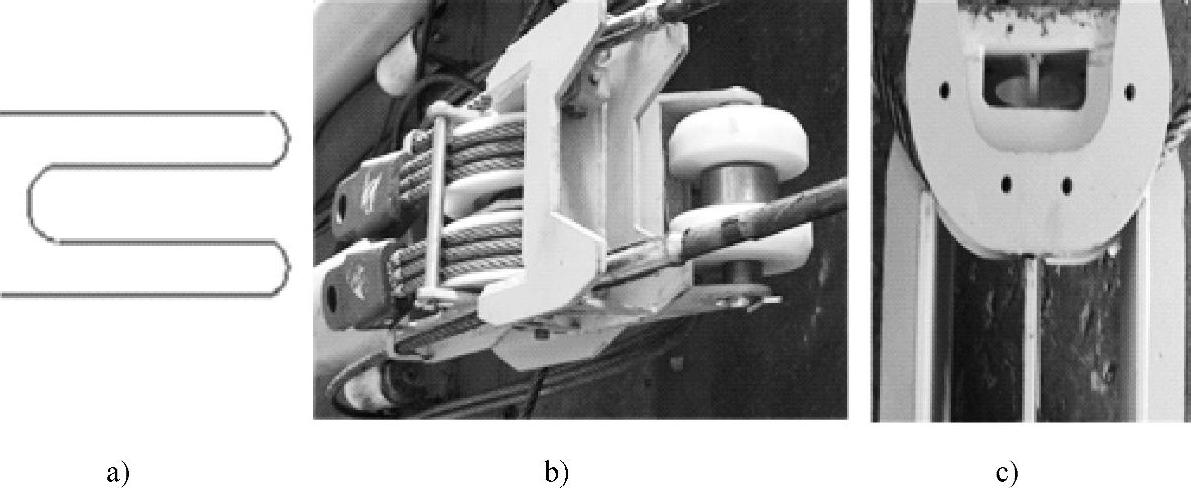
图5-9 伸缩缸缸头支架机构维修装配
a)细拉索Ⅱ走向示意图 b)粗拉索Ⅰ c)细拉索Ⅱ
1)伸缩缸导向轮对着四节臂尾部,将细拉索Ⅱ两端螺杆穿过四节臂筒体,从五节臂头部穿出,拧上螺母、垫圈。
2)伸缩缸组件缓慢地进入四、五节臂筒体内,当粗拉索Ⅰ的接头接近尾部时,装拉索座并回收滑轮。
3)粗拉索Ⅱ的拉索座固定在三节臂尾。注意粗拉索Ⅱ的拉索座与三节臂尾连接时拉索不得打绞。
(5)细拉索Ⅰ螺杆的固定 细拉索Ⅰ装配后,细拉索螺杆的螺纹部分应完好无损,如图5-11所示。
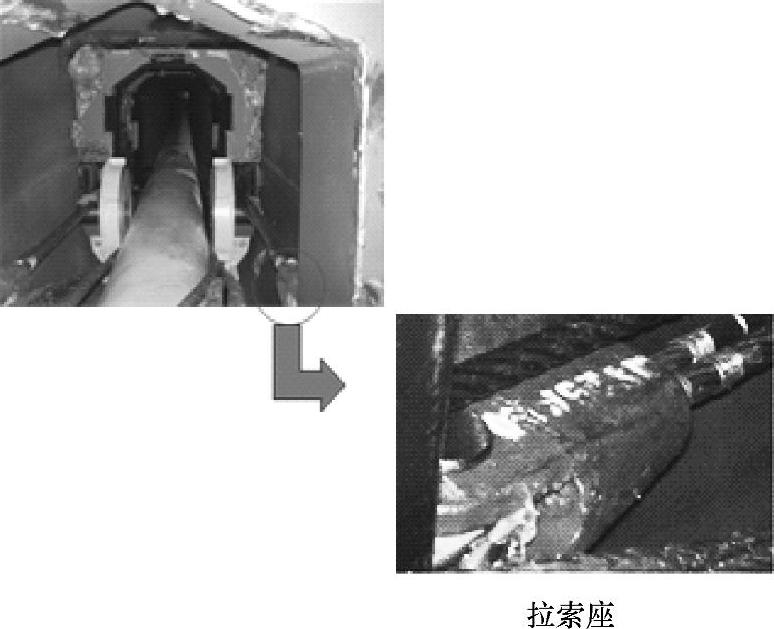
图5-10 四、五节臂与下缸组件维修装配
(6)粗拉索Ⅰ的拉索座与二节臂尾的连接 粗拉索Ⅰ的拉索座与二节臂尾连接时拉索不得打绞,如图5-12所示。
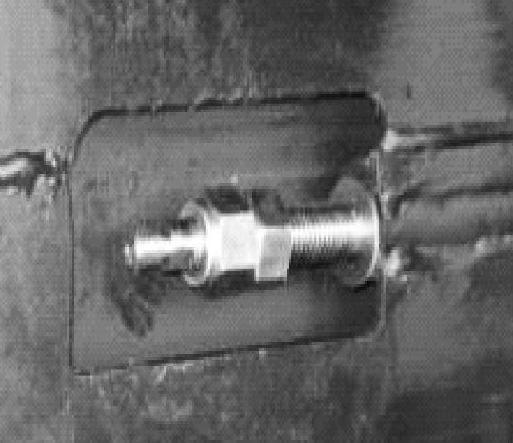
图5-11 细拉索Ⅰ螺杆的固定

图5-12 粗拉索Ⅰ的拉索座与二节臂尾的连接
5.伸臂机构的工作原理(https://www.xing528.com)
最为常见的伸臂机构主要有两种:一种是以小吨位起重机为代表的液压缸+绳排机构,另一种是以大吨位起重机为代表的单缸插销式伸缩机构。
(1)液压缸+绳排机构
1)三节臂伸缩机构伸缩工作原理如图5-13所示。
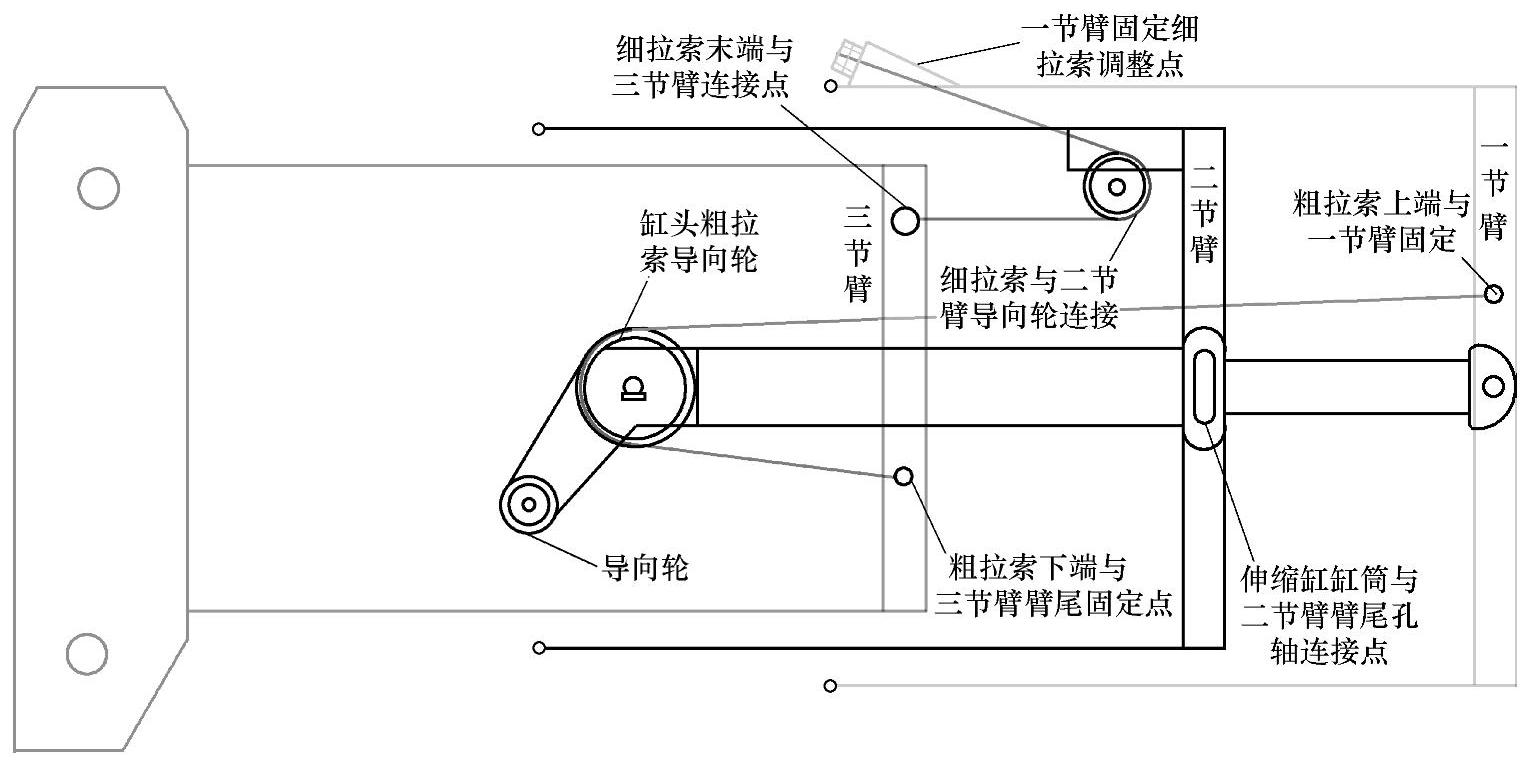
图5-13 三节臂伸缩机构伸缩工作原理
①伸出原理。
a.伸缩缸带动二节臂伸出。
b.二节臂伸出的同时,在伸缩缸和粗拉索的作用下,三节臂伸出,此时伸出完毕。
②回缩原理。
a.伸缩缸带动二节臂回缩。
b.二节臂回缩的同时,在细拉索的作用下三节臂回缩,此时回缩完毕。
2)四节臂伸缩机构(伸出)工作原理如图5-44所示。
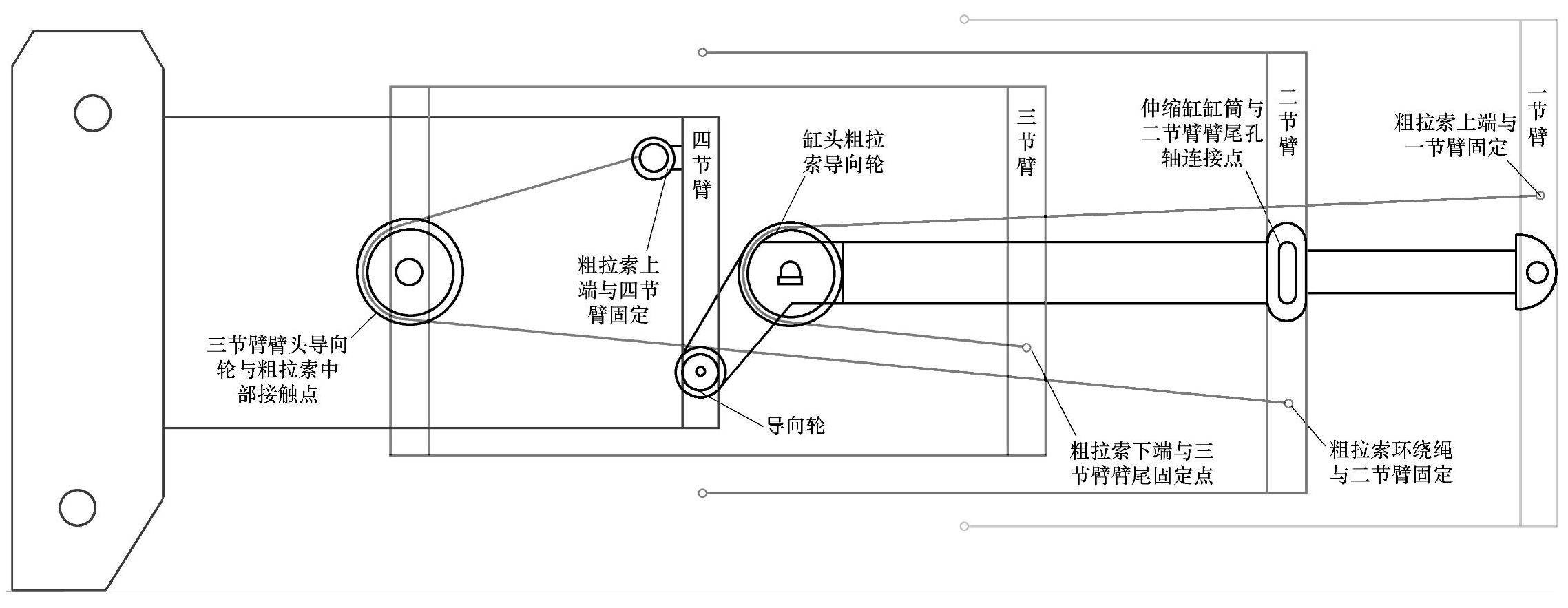
图5-44 四节臂伸缩机构(伸出)工作原理
①伸缩缸推动二节臂伸出。
②粗拉索通过缸头粗拉索导向轮拉动三节臂伸出。
③在三节臂伸出的同时,粗拉索通过三节臂臂头导向轮带动四节臂伸出,此时四节臂伸出完毕。
3)四节臂伸缩机构(回缩)工作原理如图5-45所示。
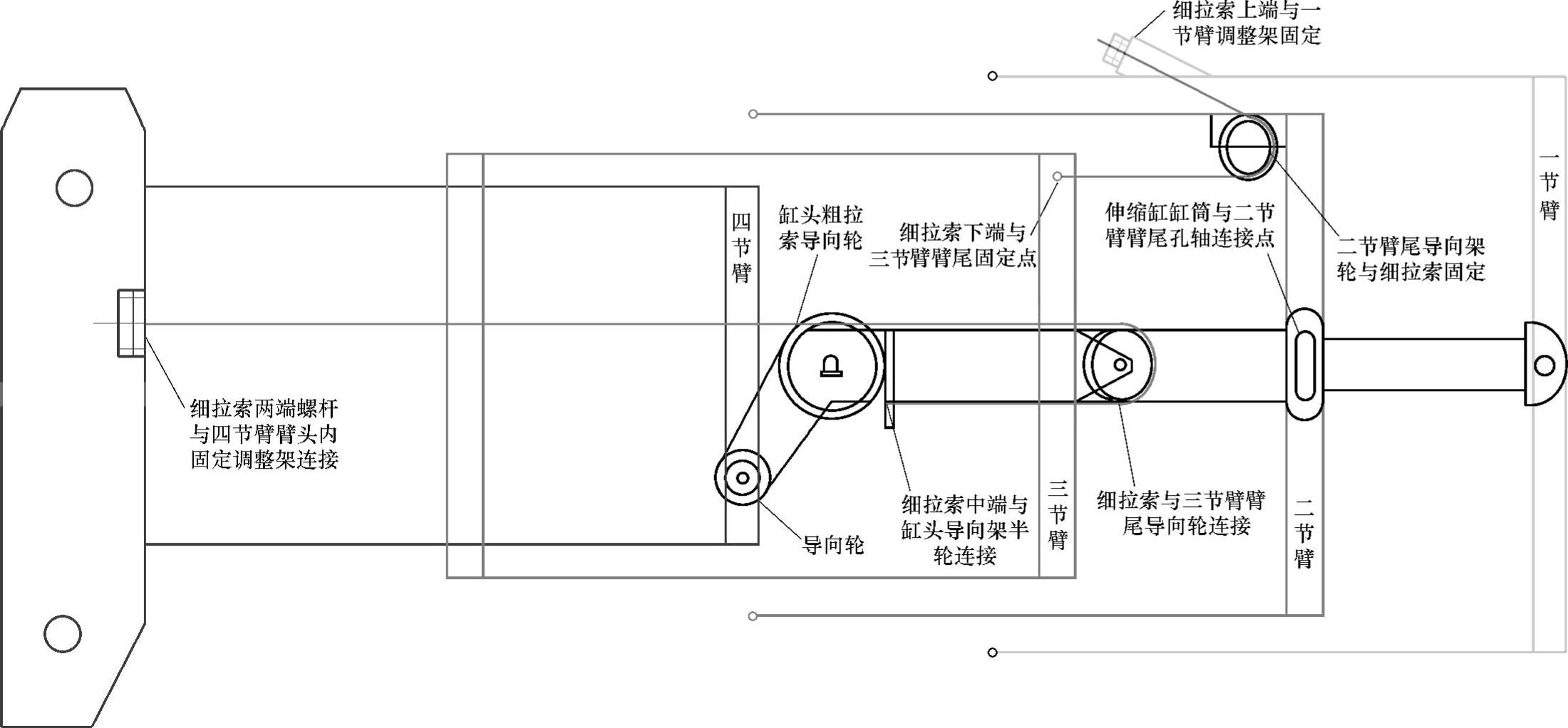
图5-45 四节臂伸缩机构(回缩)工作原理
①伸缩缸回缩时,带动二节臂回缩。
②在二节臂回缩的同时,在细拉索作用下带动三、四节臂回缩,此时三、四节臂回缩完毕。
4)五节臂伸缩机构(伸出)工作原理如图5-46所示。
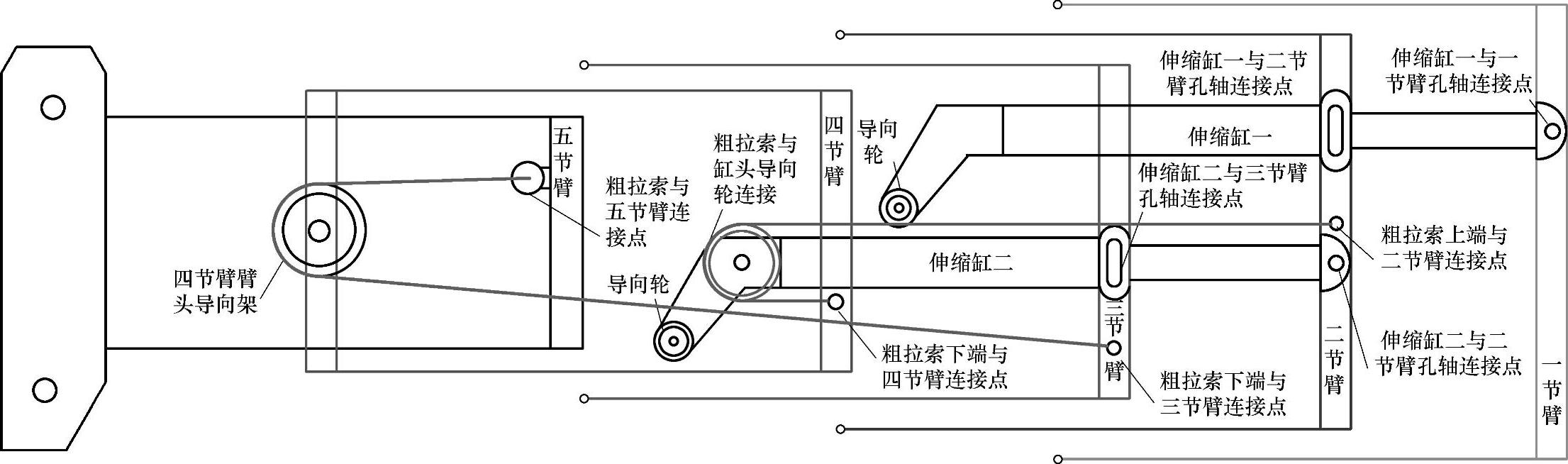
图5-46 五节臂伸缩机构(伸出)工作原理
①伸缩缸一伸出,带动二节臂运动。
②伸缩缸二伸出,带动三节臂运动,同时在伸缩缸二和粗拉索的作用下带动四节臂伸出。
③当四节臂伸出时,在粗拉索的作用下带动五节臂伸出。
5)五节臂伸缩机构(回缩)工作原理如图5-47所示。
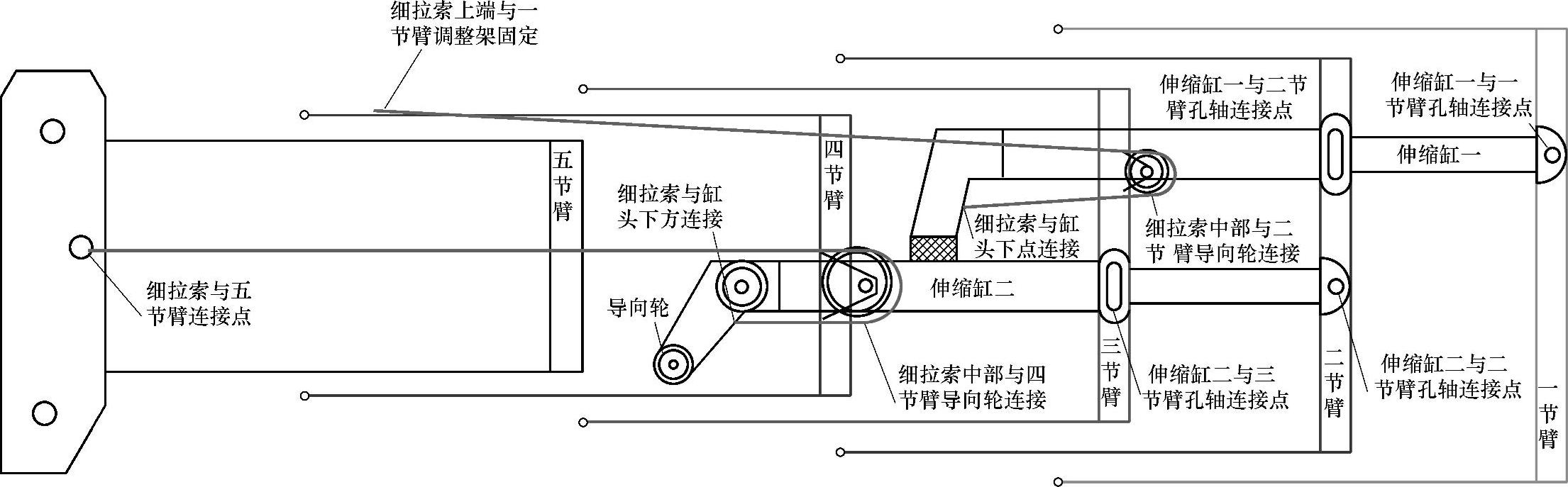
图5-47 五节臂伸缩机构(回缩)工作原理
①伸缩缸一回缩时带动二节臂回缩。
②伸缩缸二回缩时带动三节臂回缩,同时在细拉索作用下带动四节臂回缩。
③四节臂回缩的同时,在细拉索作用下带动五节臂回缩。
(2)单缸插销式伸缩机构组成及工作原理 在每节伸缩臂尾端的上方,有一个能够把该节臂与其外面的臂节锁定在一起,并可以上下运动的销轴(由于安装在吊臂上称为臂销),其作用是实现臂节之间的锁定和解锁。臂销初始位置在弹簧力的作用下可以向上运动到另一节臂的臂孔中,这样臂与臂之间不能相互运动,以达到刚性锁定目的。当臂销受伸缩缸作用时,臂销可向下移动并从另一节臂的臂孔中缩回,臂与臂之间处于解锁状态就可以相互运动,达到解锁的目的。臂销的上端有互锁机构,防止臂销受力时脱落。
如图5-18所示,单缸插销式伸缩机构的主要特点是采用单个伸缩缸来推动各节臂的伸缩,每节臂在0、46%、92%和100%的长度处分别有一个臂销孔,尾部两侧各有一个缸销孔,臂销位于每节臂的尾部,用于臂与臂之间的锁定,伸缩缸销位于伸缩缸缸筒的缸帽部位,用于推动每节臂的伸缩。起重臂伸出时按照从前到后的顺序,缩回时按照从后到前的顺序进行控制。采用机电液相结合的综合控制技术来实现单个伸缩缸自动进行多节起重臂伸缩的控制,伸缩机构的控制对象是可以运动的销轴(包括伸缩缸销和臂销),设计思想是各个销轴能够按照设定的逻辑顺序接受控制,进行锁定或解锁,并在每一个锁定或解锁动作完成指令后,进行检测并反馈完成信号给处理器,处理器可以进行下一步的运动操作。操作者根据工况进行起重臂伸缩长度设定后,控制系统通过对伸缩缸尾部缸销和各节臂上臂销位置的检测以及对伸缩缸伸缩长度的精确测量,将检测的开关量和模拟量信号传送给控制器,控制器根据反馈的信号,按照设定的伸缩目标和控制逻辑自动进行起重臂的伸缩控制。
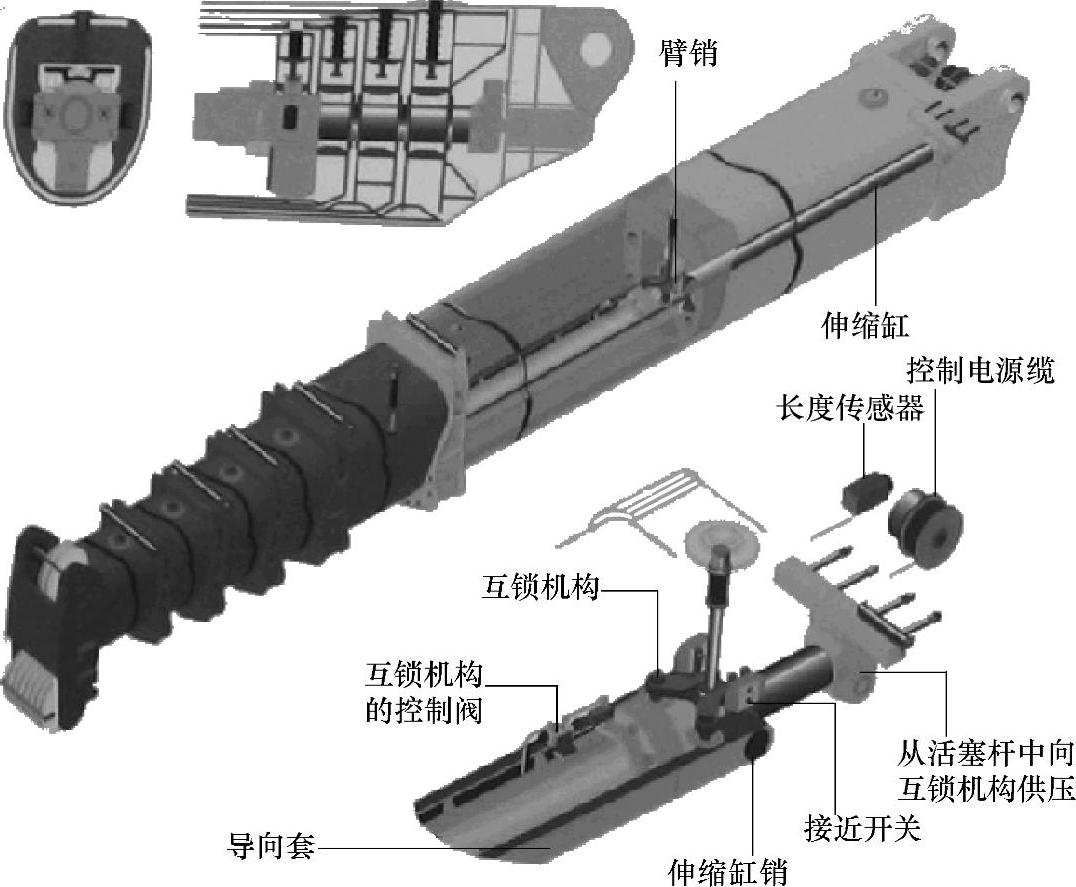
图5-18 单缸插销式伸缩机构示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。