



飞轮储能技术的DVR(动态电压调节)拓扑结构需要满足以下要求:
1)能量的双流动性。当DVR完成对电压跌落的一次补偿后,会消耗一部分飞轮存储的能量。因此,必须有充电装置及时为飞轮充电,补充消耗的能量,使其达到最大值,保证下次电压跌落补偿的顺利进行。
2)充电装置的设计首先要保障DVR的整体性能不受影响,同时针对不同的负载需要对拓扑结构进行多方面考虑。
3)放电时需要保证直流母线电压恒定,不稳定的直流母线电压不利于DVR的逆变单元的控制。在飞轮单元充电时,直流母线电压大于电机的线电压幅值,如果此时发生电压跌落,由于直流母线电压仍大于电机线电压幅值,因此,单纯的二极管整流方式无法立刻释放能量,只有当母线电压跌落到小于电机线电压幅值时才可能放电。在飞轮单元放电时,永磁无刷直流电机运行在制动状态,飞轮的动能转换为电能,单纯采用不控整流所得的电压比较低,并且随着飞轮转速的下降,直流母线电压也会随之降低。飞轮在放电时运行在高速区,随着能量的释放,飞轮转速下降,反电动势的频率和电压幅值变化范围大,一般要求飞轮转速降到50%的额定转速,仍能实现能量回馈,电机能量回馈制动是经济高效的放电模式,不需要增加任何元器件,非常适合用于飞轮储能单元的能量回馈控制。
系统并联拓扑结构如图7-70所示。
根据能量的流向,系统可分为三种工作模式:
(1)充电模式
在充电模式下,通过控制DVR变换器和飞轮变换器使飞轮加速到最高转速,电能转换为机械能。此时转换开关置于b,旁路开关保持闭合状态。充电模式分为两种情况:①飞轮从静止状态加速到最高值;②当飞轮的转速下降到设定值时,再次使飞轮转速升到最高值。
(2)待机模式(https://www.xing528.com)
当飞轮转速升到最高速度后,为了避免开关损耗,封锁DVR变换器和飞轮变换器的触发器脉冲,飞轮转速由于自身损耗会缓慢下降。此时转换开关置于a,旁路开关保持闭合状态,飞轮与电网不存在能量交换。
(3)工作模式
当电网电压突然降低时,系统进入工作模式。系统通过检测电网电压生成指令信号,对DVR变换器进行控制,产生所需要的补偿电压,补偿电压经过滤波后电压正弦化且与电网电压同相,DVR变换器的结构图如图7-71所示。
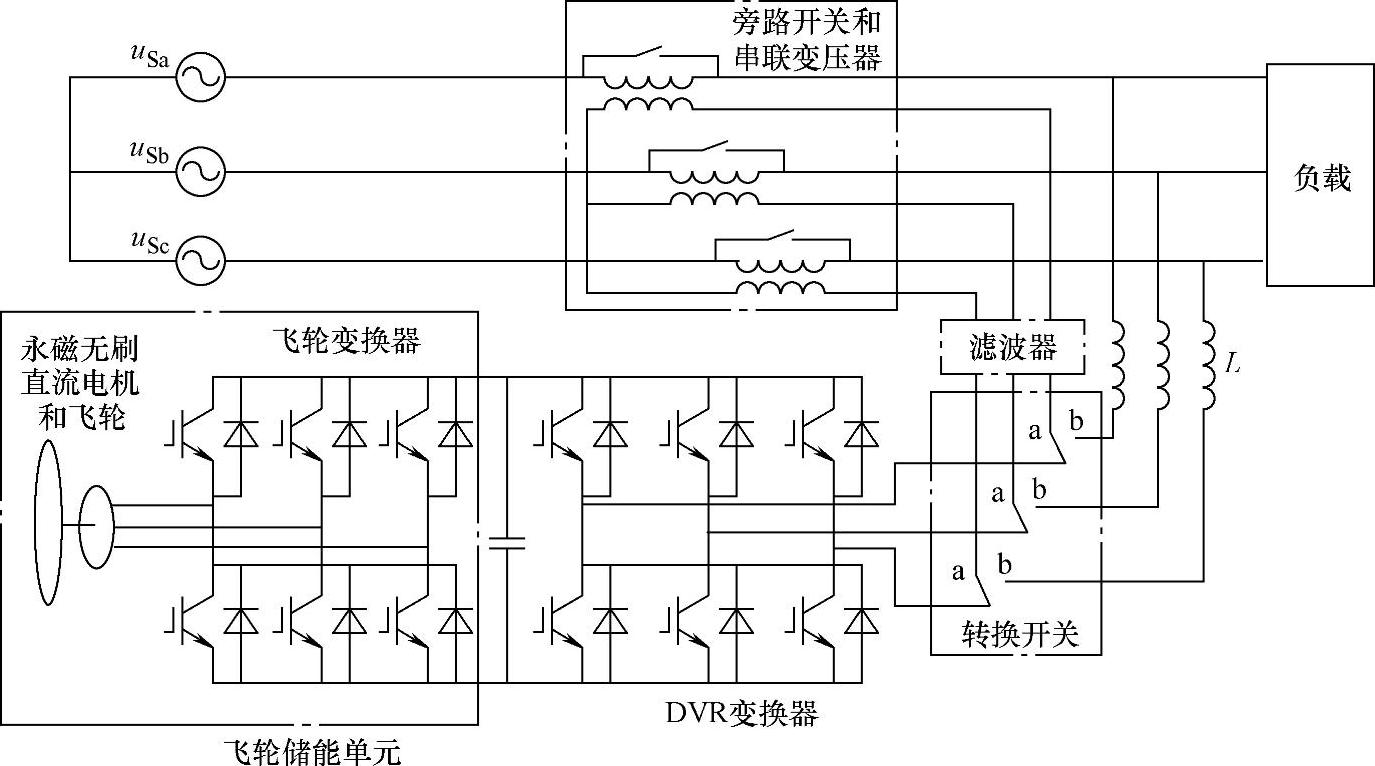
图7-70 系统并联拓扑结构
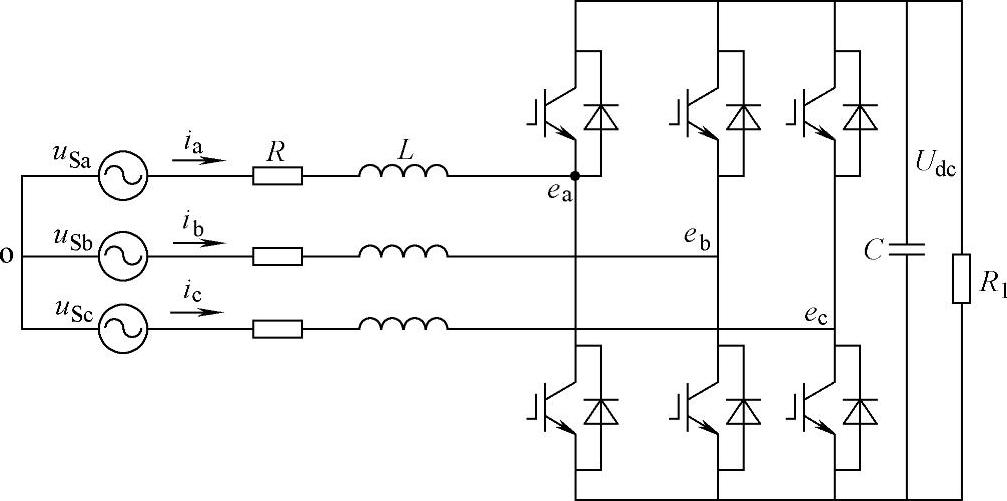
图7-71 DVR变换器的结构图
L为和电网相连的滤波电感,将功率开关损耗等效电阻、滤波电感等效电阻合并为R,uSa、uSb、uSc为电网三相电压,ia、ib、ic为变换器交流侧的三相电流,ea、eb、ec为变换器输入电压。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。