



腰部运动主要有两个自由度:弯腰和转腰,弯腰的运动范围大约是0°~30°,转腰的运动范围大约是±45°,腰部自由度的实现都是由直流电动机驱动。腰部零件主要有轴承座、轴承、轴、支架和板组成,材质主要选用Q235或45号钢。腰部的实物如图2-24所示。
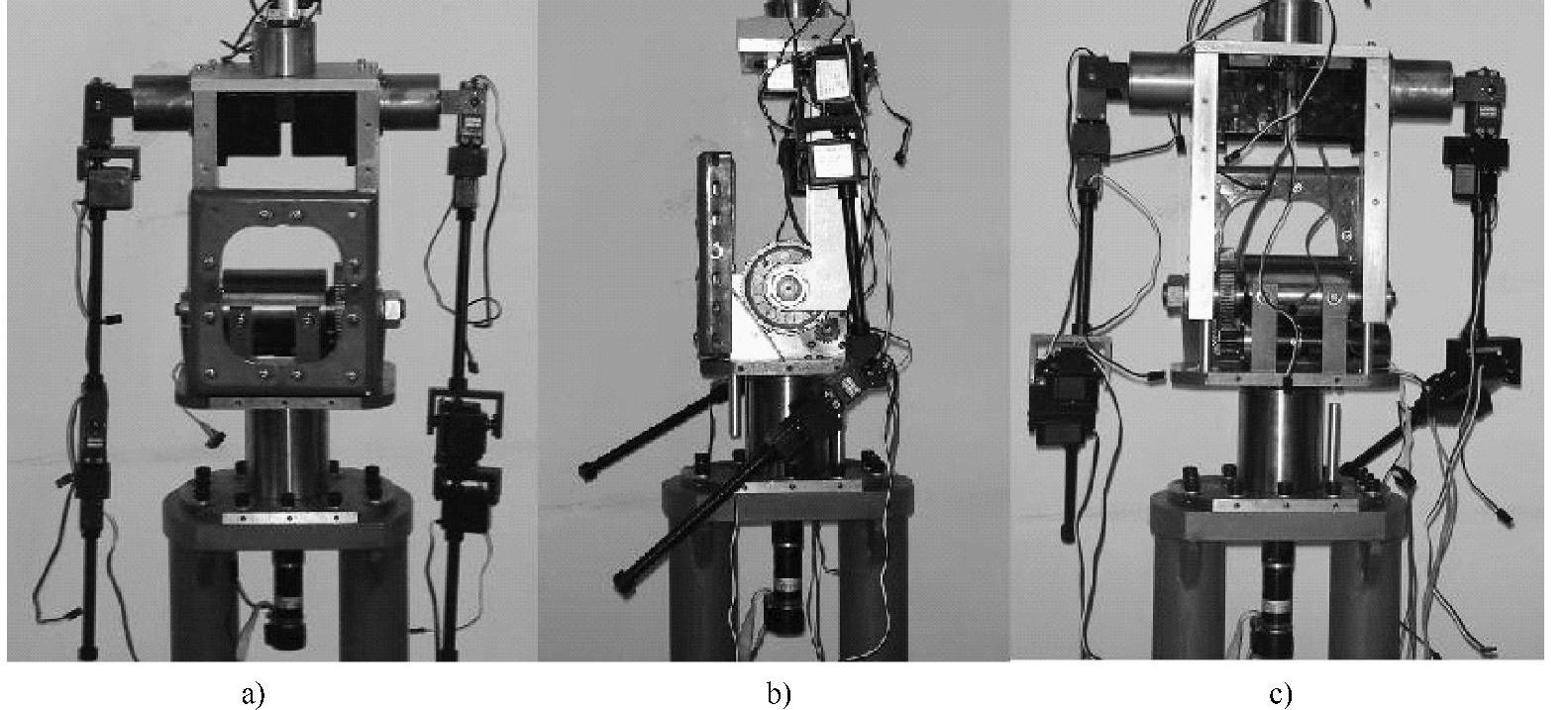
图2-24 腰部的实物机械结构
a)腰部正面 b)腰部侧面 c)腰部背面
1.弯腰、转腰机构的设计实现
弯腰机构由一个直流电机驱动,由于该直流电机的额定扭矩是2N·m,而根据计算整个机器人要完成0°~30°的弯腰动作需要的扭矩约为7N·m,因此采用了1∶4的齿轮减速装置来增大扭矩。轴承的选用是为了减小摩擦力和保证精度。在0°和30°两个位置由两个传感器限制弯腰的幅度,这是从电路方面做的限位,但是考虑如果电路上出现问题,有可能对机械结构造成破坏,因此还有两个机械限位零件来防止腰部转过0°~30°。
转腰机构也是由一个直流电机驱动,轴承的选用减小了摩擦力,即使再考虑转动惯量,也不需要减速即可驱动整个上身的转动。转动的范围在±45°,通过安装在底板上的传感器来控制转动的位置。同样,为防止电动机转过对机械结构的破坏,也采取了机械限位,在±45°处安装了两个限位零件。
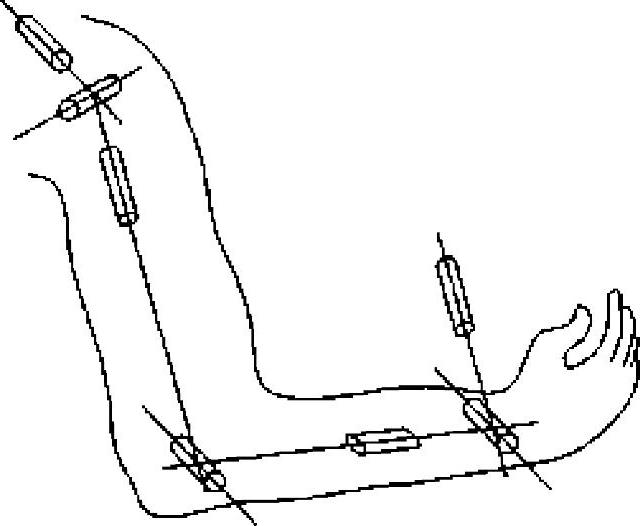
图2-25 人体手臂关节构成简图
2.人体手臂的运动特征
研究情感机器人手臂首先需要了解人体手臂的机构特征。人体的手臂由肩关节、大臂、肘关节、小臂、腕关节、手等几部分组成。如图2-25所示,手臂的运动是靠肩关节、肘关节和腕关节的活动以及肌肉的牵引运动共同完成的。对于人体手臂的机构学特征,在仿生学研究中存在两种观点:(https://www.xing528.com)
1)美国的Mark E.Rosheim将人类手臂归结为:肩关节是球窝关节(Ball-and-Socket Joint),具有三个转动自由度,能实现屈伸、外展内收、旋转(Pitch-Yaw-Roll)等运动,其运动参数是:前驱90°、后伸35°;外展90°、内收45°;内旋45°、外旋45°;肘关节属于单轴关节,具有一个自由度,能实现屈伸运动,屈伸幅度为135°,其抗拉伸能力为85~230kg;腕关节由挠腕关节和腕骨关节组成,这两个关节在结构上彼此独立但在运动中紧密相连,因此被视为一个关节,具有三自由度,手腕在Roll-Pitch-Roll和Pitch-Yaw-Roll两种机构运动模型,能实现屈伸、外展内收和旋转等运动,屈和伸幅度各为85°,外展90°、内收45°,内旋45°、外旋45°。
2)日本的远藤博史和田充雄博士则认为人体7自由度手臂是由3自由度肩关节,2自由度肘关节和2自由度腕关节组成。当然,除了上述基本自由度外,由于肌肉的牵引作用,人的手臂具有更多的自由度,因此具有高度的运动灵活性。根据中国人体测量值的有关资料表明,人体手臂的几何尺寸构成是
上肢∶身高≈0.452∶1
大臂∶小臂∶手掌≈1.42∶1.2∶0.38
从机构学原理上分析,人体手臂是一个典型的串联机构和并联机构的结合体,其中连接肩关节由六组肌肉构成,其中四组是基本驱动,构成一个驱动器冗余的三自由度并联机构,驱动肩关节的三个方向转动;腕关节的驱动肌肉为前臂肌的前群和后群,均起于挠骨和尺骨构成并联机构,实现腕部的三自由度运动;而肘关节和肩关节、腕关节一起构成串联机构形式的人体手臂;因此,人体手臂既有较大的工作空间(串联机构的优点)又具有较高的结构刚度(并联机构的优点)。人体手臂的特殊结构使手臂在运动中具有良好的动态性能。运动中手臂的刚度较小,当人体感觉到外界的干扰时,可以会迅速调整手臂的运动学、动力学状态,使操作顺利进行;而持重时手臂的刚度较大,以保持稳定的状态。
3.手臂机构的设计实现
本例中的手臂按照人体的比例和自由度配置进行设计,共有10个自由度,每只手臂各有5个自由度,分别是:肩部向前抬手臂(舵机1驱动)、大臂转动(舵机2驱动)、肩部侧向抬手臂(舵机3驱动)、肘部弯曲(舵机4驱动)、小臂转动(舵机5驱动)。手臂的三维图如图2-26所示。手臂共由10个舵机驱动,舵机全部选用HG14-M,舵机的扭矩为14kg·cm,经计算满足手臂运动到各个位置的最大扭矩。考虑减轻手臂的重量,零件所选材料均为硬铝。
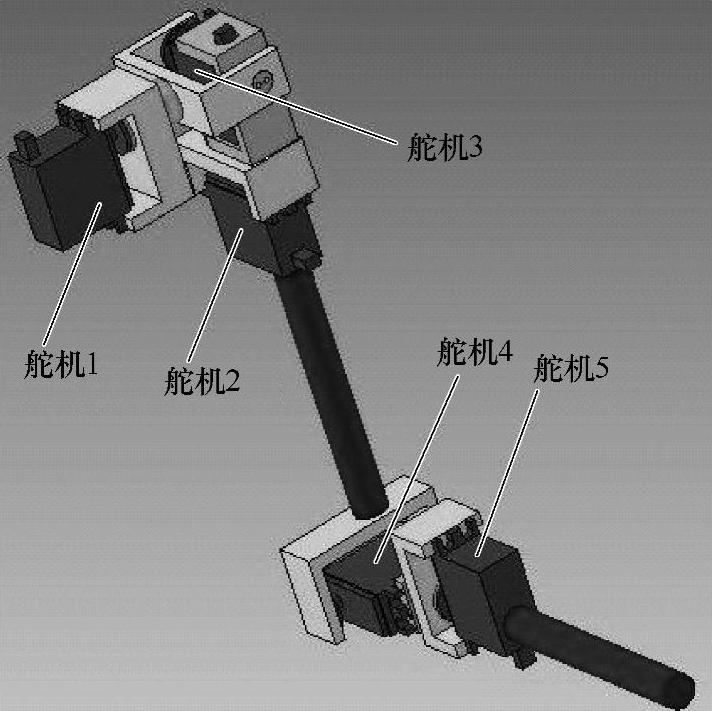
图2-26 手臂的三维图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。