



双臂间协调避障是机器人研究的一个热点,本节基于前几节双臂避障模型及理论的基础上,以五自由度情感机器人的双臂为例,使机器人双臂进行交叉运动。本文规定双臂的右臂为主臂,左臂为从臂,主臂具有较高的运动优先权。给定机器人的左右臂各自起点、目标点,规划出机器人双臂避障运动轨迹。避障算法首先判断主臂和从臂在各自进行作业时是否发生碰撞,若发生碰撞,则使具有优先运动规划权的主臂先完成规划动作,然后从臂把主臂作为障碍物处理,并规划出一条无碰撞的轨迹。对机器人双臂未采用避障算法和采用避障算法分别进行仿真,通过仿真比较验证避障算法的可行性。
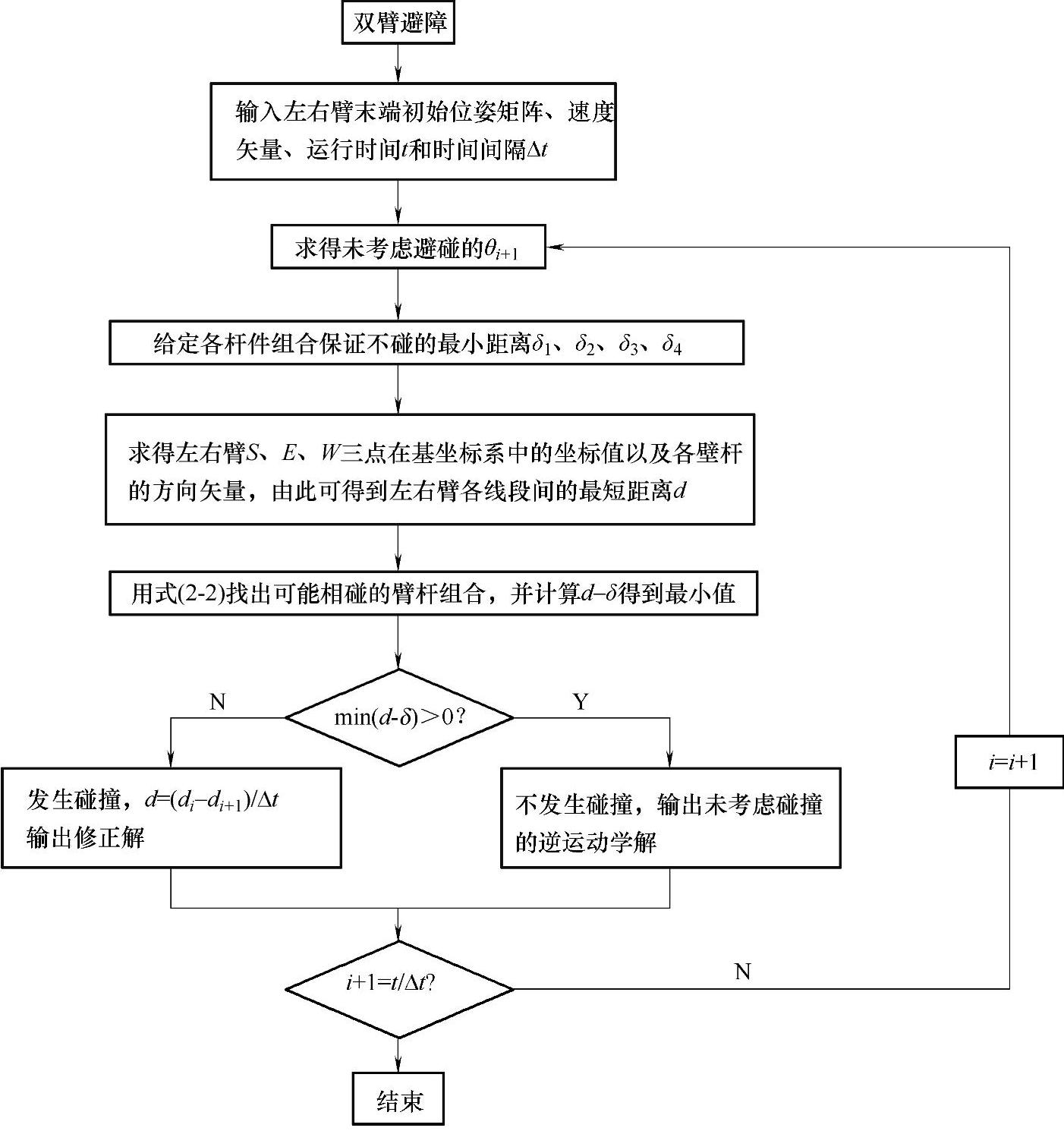
图2-30 双臂避障算法的流程图
在手臂运动学研究的基础上,以五自由度手臂(双臂共十个自由度)为例进行仿真。以图2-28所示坐标系及图2-31所示起始点及目标点进行计算,右臂起始点A1(-376,0,-125)到目标点A2(-270,100,25);左臂起始点B2(-376,0,125)到目标点B2(-270,100,-25)。由此可得A1、A2、B1、B2的位姿矩阵为
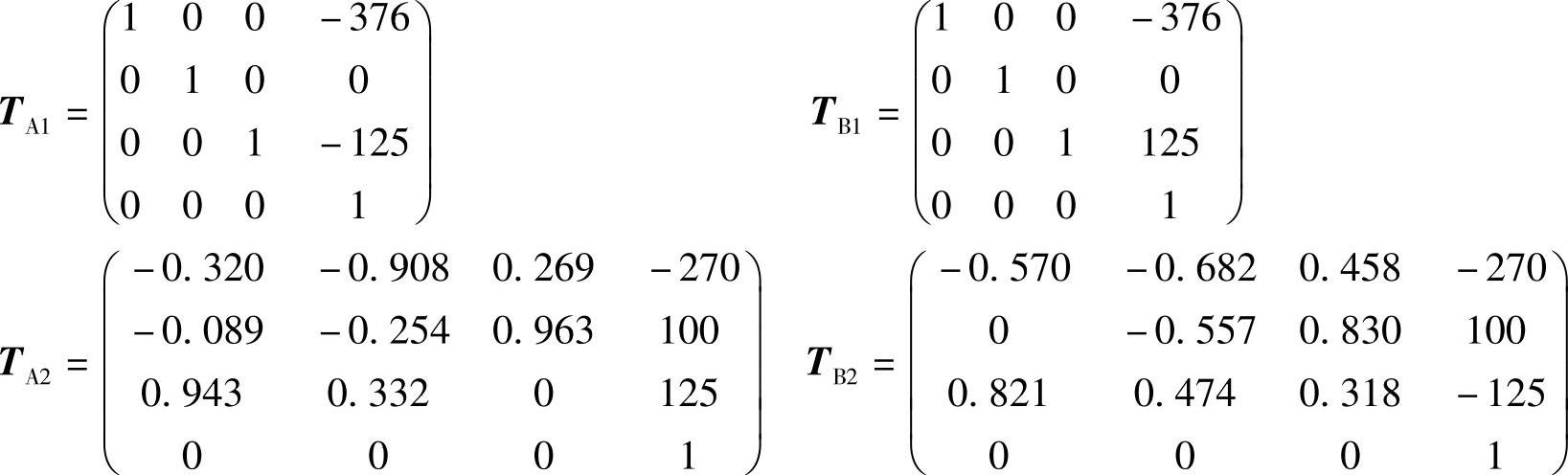
右臂是主臂,具有较高运动优先权,故而从A1运动到A2不需采用避障算法,而左臂是从臂,由B1运动到B2,关节角速度不大于±90°/s,仿真时间为5s,采样时间为0.5s。
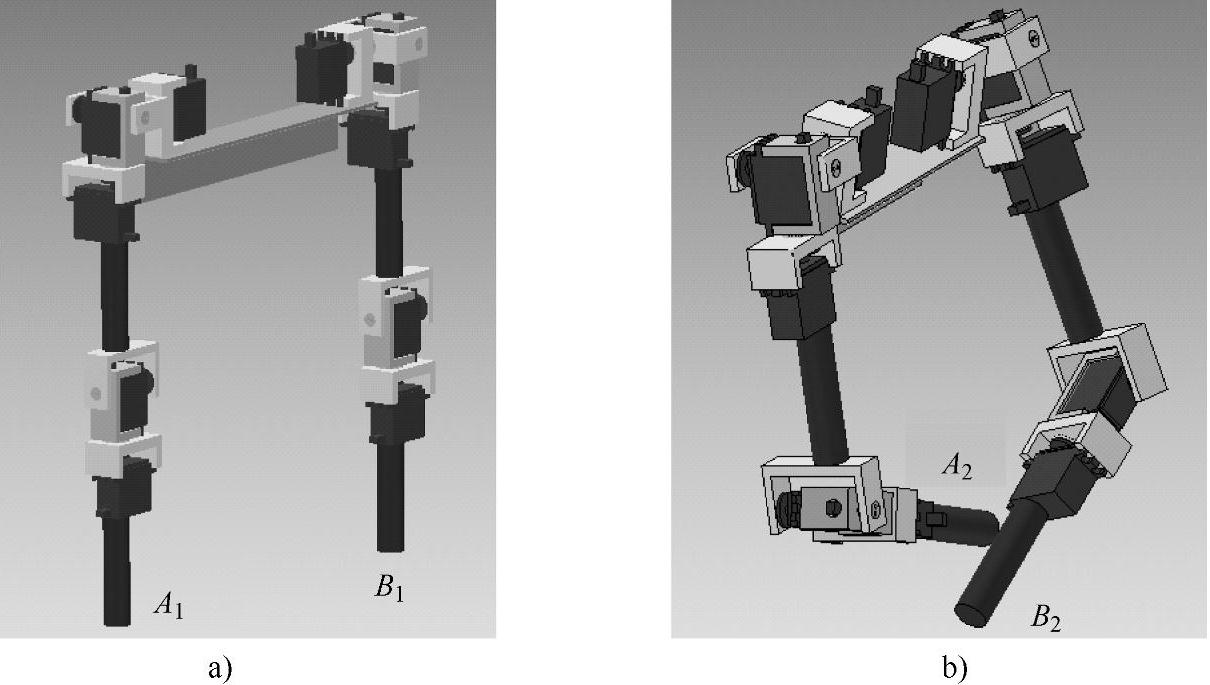
图2-31 轨迹规划的起始点及目标点
a)起始点 b)目标点
计算出大臂在公共坐标系中的方向数为
右大臂(-0.963,0,0.269);左大臂(-0.963,0,0.269);
右小臂(-0.478,-0.496,0.134);左小臂(-0.478,0.867,0.134)。
按照式(2-1)进行计算可知,大臂杆不会相碰而小臂杆已经碰撞,现在已找出相碰杆组合,然后进行输出修正。
根据避障算法的流程将修正解返回计算,由于右臂是主臂,只计算左小臂的方向数为(-0.963,0,0.269),双小臂不碰的最小距离δ=0.3m,经修正计算后的小臂杆直接最短距离满足d=0.455>δ,因此不发生碰撞,输出碰撞的运动学逆解。将所求解应用Origin7软件仿真可以得出关节角度的变化曲线。
Origin7具有两大类功能:数据分析和绘图。数据分析包括数据的排序、调整、计算、统计、频谱变换、曲线拟合等各种完善的数学分析功能。准备好数据后,进行数据分析时,只需选择所要分析的数据,然后再选择响应的菜单命令就可以完成其数学分析过程。Origin的绘图是基于模板的,Origin本身提供了几十种二维或三维绘图模板而且允许用户自己定制模板。绘图时,只要选择所需要的模板便可以。用户可以自定义数学函数、图形样式和绘图模板;可以和各种数据库软件、办公软件、图像处理软件等方便地连接;可以运用C等高级语言编写数据分析程序,还可以使用内置的Lab Talk语言编程等。
通过Origin7绘图是将复杂的计算数据以图线的绘图形式展现出来,有利于我们对避障算法进行分析与研究。我们先将运动学逆解数据导入该软件,然后通过软件输出我们所需要的输入、输出图线。Origin7软件界面如图2-32所示。
为了求得在关节空间中形成的轨迹,我们首先用运动学反解将路径点转换成关节矢量角度值,然后对每个关节拟合一个光滑函数,在满足所要求的约束条件下,可以选取不同类型的关节插值函数,以生成不同的轨迹。常用的插补算法有线性插补、分段插补及多项式插补等。(https://www.xing528.com)
线性插补会使线性插值关节在起点和终点的速度和加速度不连续,运动不平稳,且加速度无穷大,显然在两端会造成刚性冲击。抛物线分段插补可以保证起点和终点的速度平稳过渡,从而使整个轨迹上的位置和速度连续,但又出现了起点和终点加速度不连续的情况。因此,必须建立一个五次多项式(2-3)进行插值即可以实现系统的平稳运动。
θt=ɑ0+ɑ1t+ɑ2t2+ɑ3t3+ɑ4t4+ɑ5t5 (2-3)
如果未采用避障算法,则右臂和左臂都将按照起始点到目标点的运动轨迹进行,那么左、右臂同时到达目标点位置后就会产生左、右臂小臂杆相碰撞的情况,左、右臂末端位置姿态构型如图2-33a所示。计算出左臂的关节角度变化曲线如图2-34a所示。
如果采用避障算法时,右臂是主臂,右臂从起始点运动到目标点仍然按照预定的运动轨迹进行,而左小臂是从臂,则会绕开右小臂到达目标点位置,左、右臂末端位置姿态构型如2-33b所示。计算出的左臂的关节角度变化曲线如2-34b所示,经比较可知避障后的左臂关节1、3、4会与未避障时的关节角度有明显改变。
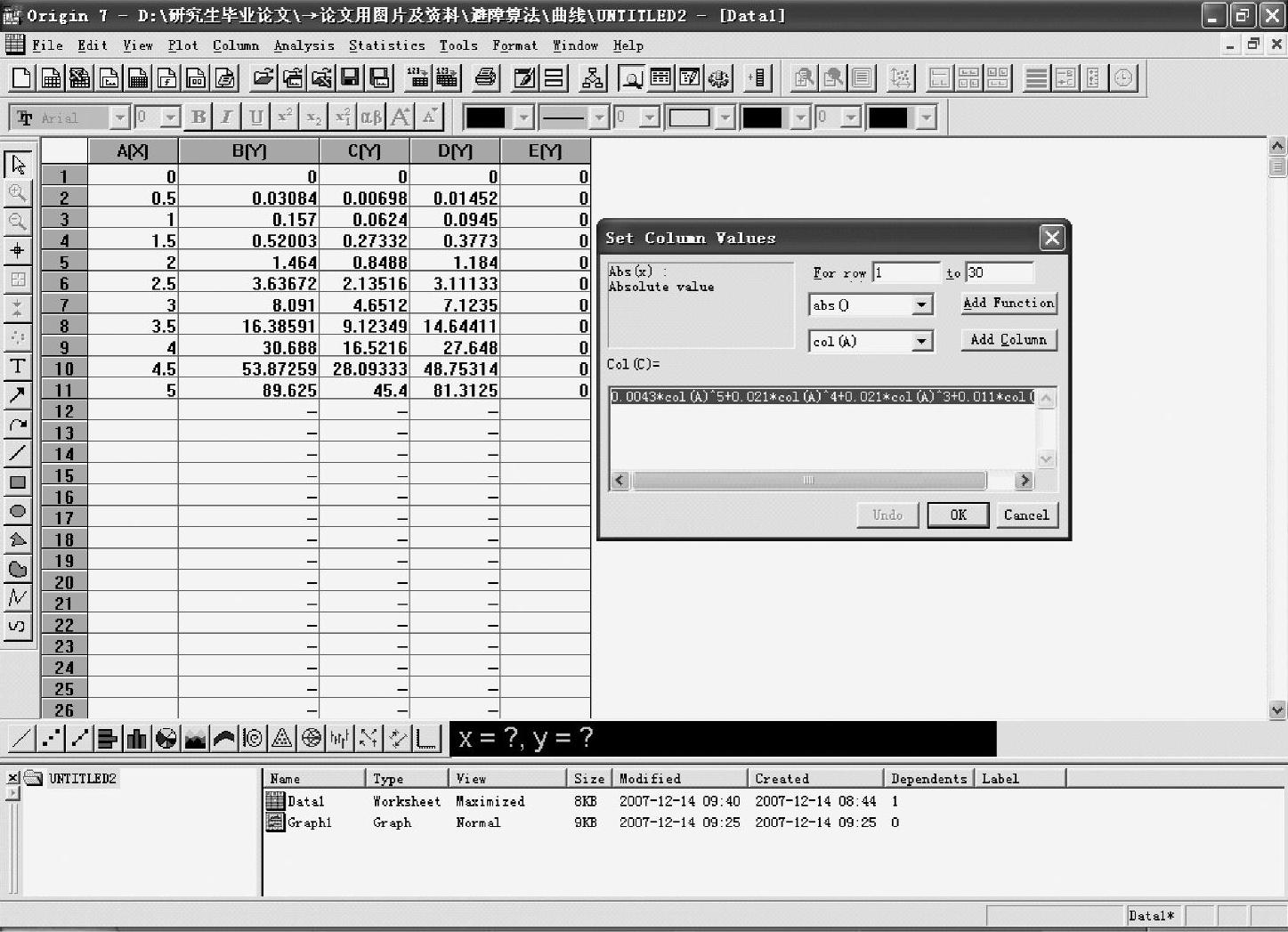
图2-32 Origin7软件界面
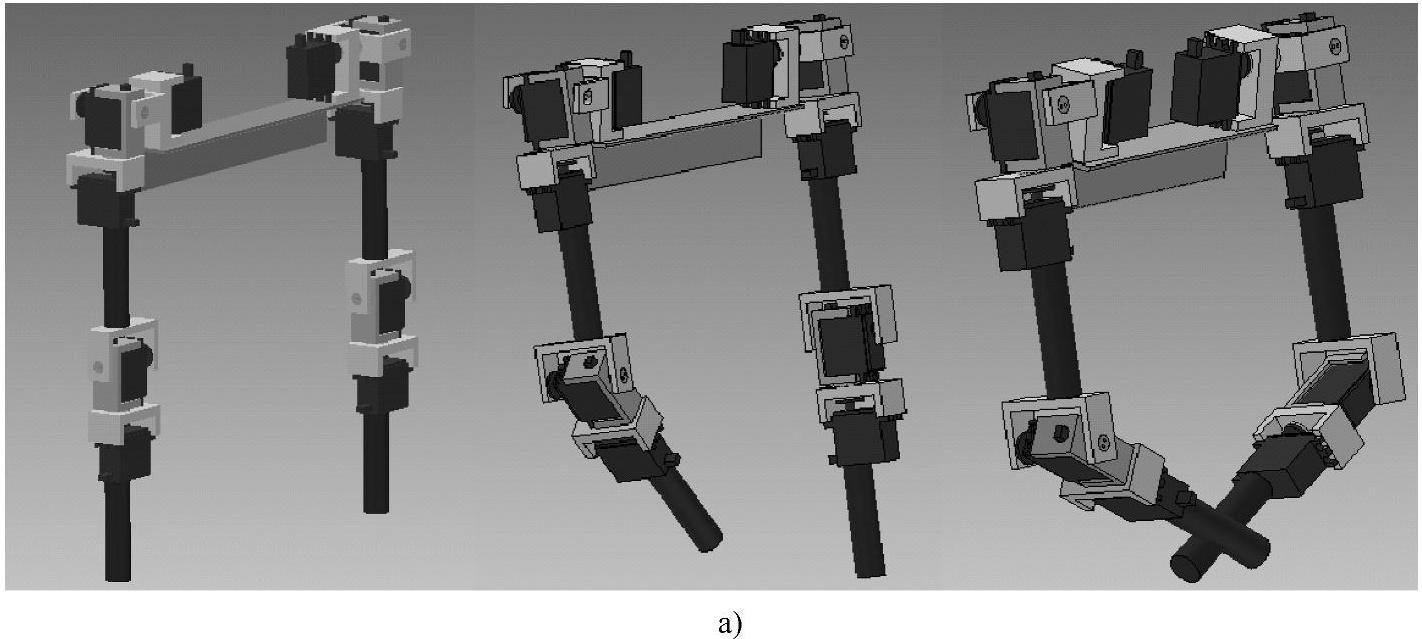
图2-33 末端姿态构型仿真结果
a)未采用避障算法得到的仿真结果
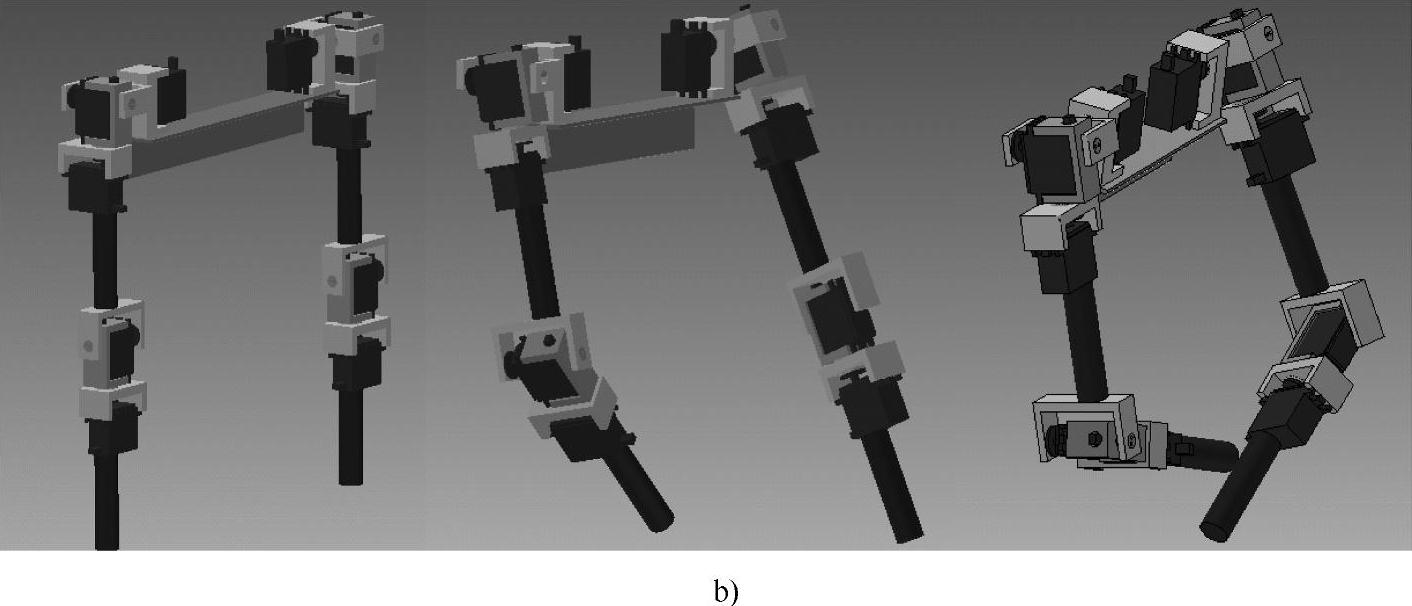
图2-33 末端姿态构型仿真结果(续)
b)采用避障算法得到的仿真结果
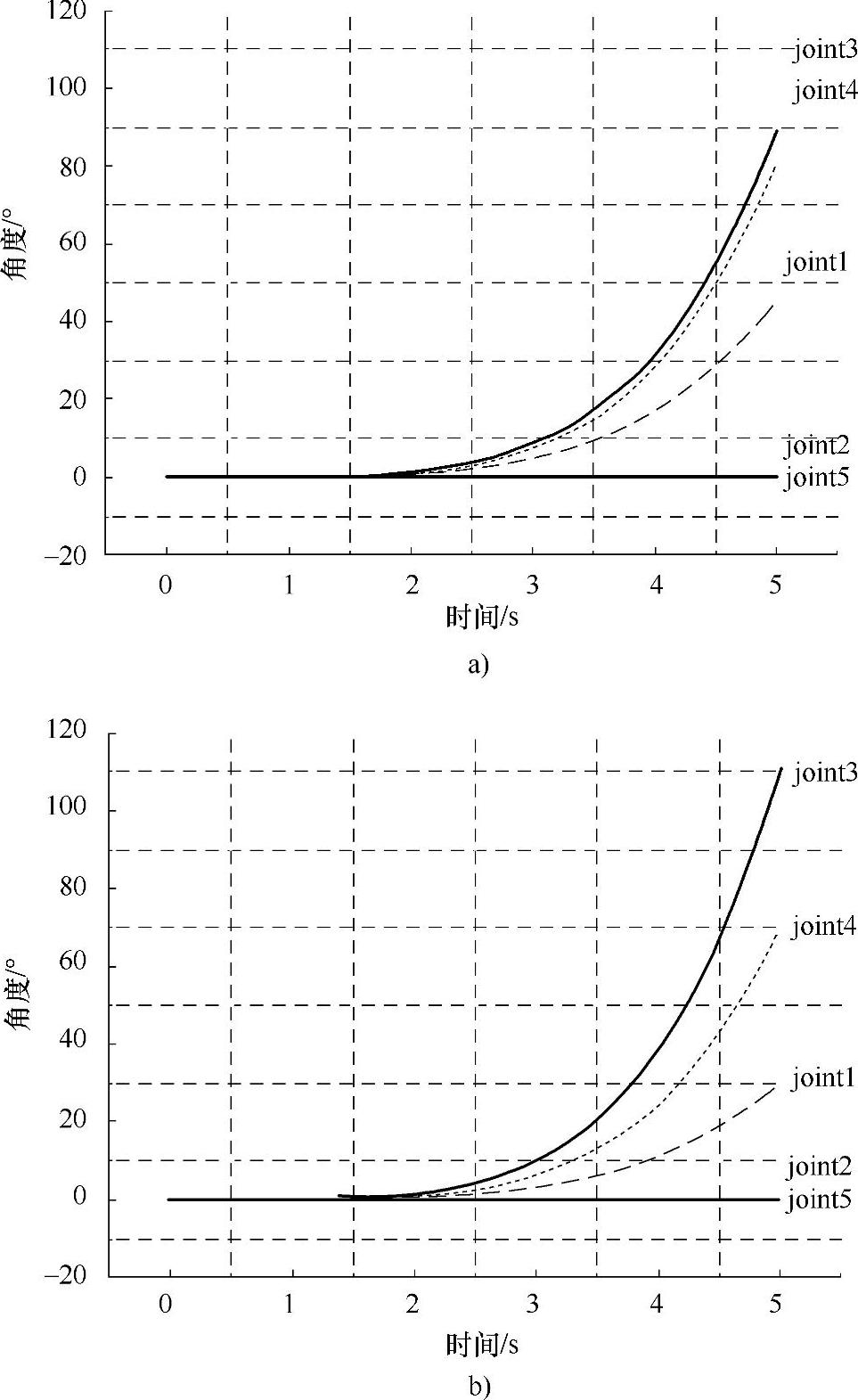
图2-34 左臂的关节角度变化曲线
a)未采用避障算法得到的关节角度变化曲线 b)采用避障算法得到的关节角度变化曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。